- Geometrie euclidienne
-
Géométrie euclidienne
La géométrie euclidienne commence avec les Éléments d'Euclide, qui est à la fois une somme des connaissances géométriques de l'époque et une tentative de formalisation mathématique de ces connaissances. Les notions de droite, de plan, de longueur, d'aire y sont exposées et forment le support des cours de géométrie élémentaire. La conception de la géométrie est intimement liée à la vision de l'espace physique ambiant au sens classique du terme.
Les conceptions géométriques connaissent, depuis les travaux d'Euclide, des évolutions suivant trois axes principaux :
- Pour vérifier les critères de rigueur logique actuels, la définition axiomatique subit de profonds changements, l'objet mathématique restant néanmoins le même.
- Pour ne plus se limiter aux dimensions deux et trois et pour permettre l'élaboration d'une théorie plus puissante, un modèle algébrique de la géométrie est envisagé. L'espace euclidien est maintenant défini comme un espace vectoriel ou affine réel de dimension finie muni d'un produit scalaire.
- Enfin, la structure géométrique euclidienne n'est plus la seule envisageable ; il est établi qu'il existe d'autres géométries cohérentes.
Plus de 2000 ans après sa naissance, l'espace géométrique euclidien est un outil toujours efficace aux vastes domaines d'applications. Par exemple, l'espace des physiciens reste encore principalement du domaine de la géométrie euclidienne, l'astronomie étant l'exception la plus notoire.
Son aspect mathématique est traité de manière didactique dans l'article produit scalaire. L'article se fonde sur la formalisation d'un vecteur à l'aide d'un bipoint, développé dans vecteur. Une approche plus poussée, fondée sur la formalisation axiomatique de l'espace vectoriel est développée dans espace euclidien.
Sommaire
L’approche euclidienne de la science de l’espace
La géométrie euclidienne au sens des antiques traités du plan et de l'espace ; elle est souvent présentée comme une géométrie « de la règle et du compas ». Les objets considérés sont les points, les segments, les droites, les demi-droites, avec leurs propriétés d'incidence (la règle), ainsi que les cercles (le compas). Les enjeux essentiels sont l'étude de figures et la mesure.
Les outils de la géométrie d'Euclide
Articles détaillés : Vecteur et Produit scalaire.La construction d'Euclide se fonde sur cinq postulats[1] :
- Un segment de droite peut être tracé en joignant deux points quelconques distincts.
- Un segment de droite peut être prolongé indéfiniment en une ligne droite.
- Étant donné un segment de droite quelconque, un cercle peut être tracé en prenant ce segment comme rayon et l'une de ses extrémités comme centre.
- Tous les angles droits sont congruents.
- Si deux lignes sont sécantes avec une troisième de telle façon que la somme des angles intérieurs d'un côté est strictement inférieure à deux angles droits, alors ces deux lignes sont forcément sécantes de ce côté.
Les raisonnements sur les figures géométriques portent sur leurs intersections et leurs dimensions : sur l'incidence et la mesure. De ce point de vue, certaines transformations des figures sont utiles ; les plus pertinentes sont les similitudes, c'est-à-dire les transformations qui conservent les rapports des distances. Les similitudes les plus simples sont les rotations, les symétries, les translations, qui conservent les distances, ainsi que les homothéties. À partir de ces quelques objets de base, toutes les similitudes peuvent être construites par composition.
La construction d'Euclide permet le développement des notions de mesure de longueur, d'aire, de volume, d'angle. Il existe de nombreuses aires de surfaces usuelles calculables par les techniques des Éléments. Une méthode, la méthode d'exhaustion qui préfigure l'intégration, permet d'aller plus loin. Archimède (287-212 av. J.-C.), par exemple réalise la quadrature de la parabole. Une limite de la notion de mesure vient de ce que les nombres considérés sont seulement les nombres constructibles (à la règle et au compas).
Les deux théorèmes fondamentaux sont le théorème de Pythagore et celui de Thalès. Un peu d'analyse permet d'aller plus loin avec la trigonométrie. C'est le premier exemple de construction d'un pont entre la géométrie euclidienne pure et une autre branche mathématique, pour enrichir la palette d'outils disponibles.
Approche géométrique de l'algèbre
Article détaillé : Algèbre géométrique.La formule de l'aire d'un rectangle ou d'un triangle, le théorème de Thalès ainsi que celui de Pythagore offrent tous des relations algébriques entre des grandeurs que sont les cotés d'un triangle ou d'un rectangle. Ces différentes méthodes sont l'un des ingrédients de l'algèbre naissante, initiée par Diophante, et développée par la civilisation arabe.
Le traité d'Al-Khawarizmi, un mathématicien persan du VIIIe siècle, intitulé La transposition et la réduction a pour objectif la résolution d'une équation du second degré quelconque. Sa méthode se fonde sur ce que l'on appelle maintenant les identités remarquables, qui, chez lui se démontrent toutes à l'aide de la géométrie euclidienne.
Cette géométrisation de l'algèbre porte ses fruits aussi en arithmétique, la science des nombres. La première démonstration montrant l'existence de grandeurs irrationnels est probablement géométrique[2]. Certains calculs comme la valeur du nième nombre triangulaire ou encore la somme des n premiers cubes d'entiers sont réalisés géométriquement[3].
Succès et limites
Articles détaillés : Triangle et Construction à la règle et au compas.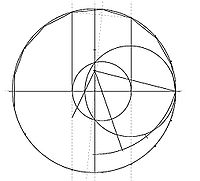 Figure à la règle et au compas : heptadécagone, un polygone régulier de 17 côtés.
Figure à la règle et au compas : heptadécagone, un polygone régulier de 17 côtés.
Un objectif de la géométrie euclidienne est la construction de figures à la règle et au compas. L'étude du triangle relève de ce domaine. La richesse des résultats obtenus est illustrée par la liste des éléments remarquables d'un triangle. Une famille de figures emblématiques est celle des polygones réguliers (voir l'article Partage d'une tarte). Ils ne sont cependant pas tous constructibles. Les techniques de construction s'appliquent non seulement au plan, mais aussi à l'espace comme le montre l'étude des polyèdres.
Une spécificité de la géométrie euclidienne réside dans le fait qu'elle n'utilise initialement que peu ou pas du tout de théorèmes complexes et puissants d'algèbre ou d'analyse. C'est une mathématique autonome et indépendante, où les preuves proviennent essentiellement de raisonnements purement géométriques. Cependant, pour les cas complexes, comme la construction de la figure ci-contre, d'autres outils, par exemple les polynômes, se révèlent indispensables (cf Théorème de Gauss-Wantzel). Les trois grands problèmes de l'antiquité, à savoir la quadrature du cercle, la trisection de l'angle et la duplication du cube, à l'aide seulement de la règle et du compas, ne se sont d'ailleurs montrés possibles qu'avec l'apport d'une autre branche des mathématiques : l'arithmétique, algébrique ou analytique[4].
La géométrie euclidienne a de nombreuses applications. La Renaissance fait largement appel aux techniques des Éléments. L'architecture, la peinture à travers la perspective[5] regorgent d'exemples de cette nature. L'art des entrelacs[6] de Léonard de Vinci (1452-1519) est un autre cas d'utilisation. Ces mathématiques servent aussi à la mesure, à la fois pour les arpenteurs et dans un objectif scientifique. Elles permettent à Ératosthène (276–194 av. J.-C.) de mesurer la circonférence de la Terre. Les techniques utilisées, dites de triangulation et ayant pour base la trigonométrie, permettent aux marins de connaître leur position.
Application et nouveaux outils : espace euclidien et physique
Article détaillé : Mécanique newtonienne. Système solaire (tailles et distances relatives non à l'échelle).
Système solaire (tailles et distances relatives non à l'échelle).À partir du XVIe siècle les mathématiques s'éloignent de plus en plus de la géométrie du triangle. La géométrie euclidienne garde son utilité car elle modélise avec pertinence le monde physique ambiant.
Cependant, l'approche purement antique devient trop restrictive. Elle n'offre pas un cadre suffisant pour le développement des mathématiques. Pour étudier les coniques[7] Blaise Pascal (1623-1662) utilise un nouvel outil : le repère. Il s'avère précieux à la naissance du calcul infinitésimal[8]. Avec le temps l'algèbre et l'analyse deviennent prédominantes : de nouvelles techniques, éloignées de celles héritées d'Euclide, sont développées. En ce qui concerne la modélisation de l'espace physique, ces nouveautés sont utilisées dans le cadre d'une géométrie peu formalisée, néanmoins avec un large succès. Les théories datant d'avant le XXe siècle se contentent de ce cadre. Encore maintenant, et dans un contexte très général, la géométrie usuelle de la physique reste euclidienne. Elle permet des résultats spectaculaires, comme la mécanique newtonienne.
Ce n'est qu'en 1915, qu'une autre géométrie, celle de la relativité générale, explique mieux un phénomène, celui de l'avance du périhélie de Mercure. La géométrie euclidienne reste maintenant valable à trois exceptions près :
-
- les distances astronomiques, dans le cadre de la relativité générale ;
- les vitesses proches de la lumière, avec la géométrie de la relativité restreinte ;
- les dimensions inférieures à la taille des particules, dans le cadre de certaines théories contemporaines comme les supercordes.
Si la modélisation de la géométrie de l'espace reste souvent la même que celle de l'Antiquité (aux exceptions déjà citées près), la formalisation change radicalement.
Approche algébrique de la géométrie
La conception de l'espace par les mathématiciens n'est historiquement pas figée ; les évolutions se font pour plusieurs raisons : le besoin de mieux fonder la théorie géométrique, d'une part en comblant certains déficits de rigueur du texte d'Euclide, d'autre part en liant la théorie à d'autres branches des mathématiques ; mais aussi la nécessité de pouvoir utiliser l'important corpus de résultats géométriques dans d'autres espaces que celui de notre monde physique ou que le plan usuel.
Ces deux derniers objectifs sont en fait atteints grâce à une branche particulière des mathématiques : l'algèbre linéaire.
Motivation : la mécanique du solide
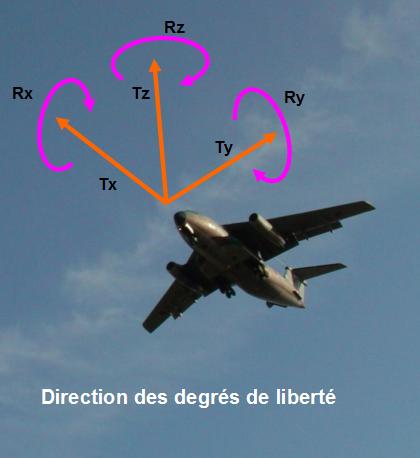
Article détaillé : Mécanique du solide. Un solide possède 6 degrés de liberté.
Un solide possède 6 degrés de liberté.La mécanique du solide apporte un point de vue nouveau sur la géométrie euclidienne. Si notre espace décrit la position du centre de gravité, le solide peut tourner autour de ce centre. Il dispose encore trois degrés de liberté supplémentaires. Il est nécessaire de considérer un espace de dimension six, pour rendre compte de la position exacte du solide.
Il en est de même pour la vitesse. Elle est décrite par le mouvement du centre de gravité, représenté classiquement par un vecteur de l'espace physique et par une rotation, que l'on peut modéliser par un vecteur (vecteur perpendiculaire au plan de rotation et dont la longueur est proportionnelle à la vitesse angulaire). Mathématiquement, le champ des vitesses est dit équiprojectif et se représente par un torseur. L'espace auquel il appartient est encore de dimension six.
Cette démarche consistant à définir un espace abstrait, qui ne représente plus directement notre univers, mais un espace spécifique au problème étudié, est féconde. Elle permet d'utiliser les outils de la géométrie euclidienne dans des contextes variés.
La mécanique statique est un autre exemple, un objet est considéré comme l'assemblage d'un ensemble de solides soumis à des contraintes qui les lient entre eux. L'objet est l'étude de la stabilité d'un corps, comme un pont ou un gratte-ciel. La dimension est égale à six fois le nombre de solides composant l'objet. Cette démarche est surtout développée durant le XXe siècle. En effet, la dimension croît rapidement et une puissance de calcul accessible uniquement depuis l'arrivée des ordinateurs est nécessaire pour rendre ces techniques opérationnelles.
Motivation : la statistique
Article détaillé : Analyse en composantes principales. Exemple de représentation euclidienne d'un dépouillement.
Exemple de représentation euclidienne d'un dépouillement.Certaines techniques de dépouillement d'un sondage utilisent les propriétés de la géométrie euclidienne. Celle-ci permet, grâce à la notion de distance, une modélisation pertinente, et, grâce aux outils de l'algèbre linéaire, une algorithmique pour les calculs effectifs.
Si les critères, représentés par les questions d'un sondage, peuvent être ramenés à des grandeurs mesurables, alors chaque sondé apparaît comme un point d'un espace dont la dimension est égale au nombre de critères. Cette géométrie est essentielle en statistique :
-
- Elle réduit la dimension de l'espace à travers le choix d'axes (appelés ici composantes) particulièrement révélateurs et en nombre réduit. L'analyse du sondage devient réalisable dans un espace plus petit, dépolluée du bruit non significatif, et graphiquement représentable pour une compréhension intuitive du dépouillement.
-
- Elle mesure les corrélations entre les différentes questions. La figure illustre ici deux critères, chacun représenté par un axe. Pour cet exemple, en première analyse, quand le critère de l'axe horizontal prend des valeurs de plus en plus élevées, alors le critère de l'axe vertical prend des valeurs de plus en plus basses. Les deux critères sont dits anticorrélés.
La démarche consistant à analyser des données à travers une géométrie euclidienne est utilisée dans de nombreuses sciences humaines. Elle permet l'analyse des comportements même lorsque ceux-ci ne suivent pas des lois rigides.
Modèle linéaire de la géométrie : les espaces euclidiens
Article détaillé : espace euclidien.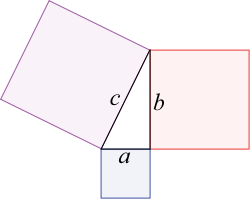 Version géométrique du théorème de Pythagore, le théorème fondamental des espaces euclidiens.
Version géométrique du théorème de Pythagore, le théorème fondamental des espaces euclidiens.La notion d'espace vectoriel fournit une première structure purement algébrique dans laquelle le langage géométrique peut s'exprimer. La notion de coordonnée devient centrale, et le plan, par exemple, est en partie modélisé par un espace vectoriel de dimension deux, qui s'identifie essentiellement à l'ensemble de tous les couples de coordonnées (x1, x2), où x1 et x2 sont deux nombres réels ; un point est alors simplement un tel couple. La généralisation se fait facilement à l'espace de dimension 3 en considérant des triplets de coordonnées, mais aussi aux espaces de dimension n. Dans cette modélisation, le plan abstrait tel que décrit par les axiomes a été muni arbitrairement d'une origine.
La description géométrique des espaces vectoriels fait jouer un rôle très particulier au vecteur nul : le vecteur "0". Les objets mathématiques habituellement associés sont des droites qui se rencontrent toutes en 0 et des transformations qui laissent inchangé le vecteur 0. On définit une structure dérivée de celle d'espace vectoriel, qui porte le nom d'espace affine, et pour lequel les points jouent tous des rôles identiques. En termes imagés, ce procédé consiste à transférer la situation observée en 0 à tous les autres points de l'espace. Cela se fait par translation, plus précisément en faisant agir l'espace vectoriel sur lui-même par translation.
La structure d'espace affine permet de rendre compte pleinement des propriétés d'incidence : par exemple, dans un espace affine réel de dimension 2, les droites vérifient le cinquième postulat d'Euclide.
Cependant, seules les propriétés d'incidence sont modélisées, une grande partie de la géométrie euclidienne classique n'est pas atteinte : il manque essentiellement une notion de mesure. Un outil linéaire permet de combler cette lacune ; c'est le produit scalaire. Un espace affine réel muni d'un produit scalaire est appelé espace euclidien, toutes les notions géométriques classiques sont définies dans un tel espace, et leurs propriétés issues de l'algèbre vérifient tous les axiomes euclidiens : les théorèmes géométriques issus du corpus classiques, portant sur n'importe quels objets vérifiant ces axiomes, deviennent donc en particulier des théorèmes pour les points, droites, cercles, tels que définis dans un espace euclidien.
Enfin, les espaces affines euclidiens ne sont pas limités aux dimensions 2 ou 3 ; ils permettent de rendre compte des différents problèmes physiques et statistiques évoqués ci-dessus, et qui mettent en jeu un plus grand nombre de variables, avec l'utilisation d'un langage géométrique. Beaucoup de théorèmes d'incidence et de mesure se généralisent presque automatiquement, notamment le théorème de Pythagore.
Le passage à un degré d'abstraction supérieur offre un formalisme plus puissant, donnant accès à de nouveaux théorèmes et simplifiant les démonstrations ; l'intuition géométrique habituelle des dimensions 2 ou 3 est parfois défiée par ces dimensions supérieures, mais reste souvent efficace. Les gains sont suffisants pour que les analyses sophistiquées soient généralement exprimées à l'aide du produit scalaire.
Historique de l'approche linéaire
 Arthur Cayley.
Arthur Cayley.La notion d'espace vectoriel apparaît petit à petit. René Descartes (1596-1650) et Pierre de Fermat (1601-1665) utilisent le principe de coordonnées comme un outil pour résoudre avec une approche algébrique des problèmes géométriques. La notion de repère orthonormal est utilisée en 1636[9]. Bernard Bolzano (1781-1848) développe une première conception géométrique[10] où les points, les droites et les plans sont définis uniquement par des opérations algébriques, c’est-à-dire l'addition et la multiplication par un nombre. Cette approche permet de généraliser la géométrie à d'autres dimensions que celles des plans et des volumes. Arthur Cayley (1821-1895) est un acteur majeur dans la formalisation des espaces vectoriels[11].
Un contemporain William Rowan Hamilton (1805-1865) utilise un autre corps de nombres que celui des réels : les imaginaires[12]. Il montre que cette démarche est essentielle en géométrie pour la résolution de nombreux problèmes.
À la suite des travaux de Gaspard Monge (1746-1818), son élève Jean Poncelet (1788-1867) réforme la géométrie projective[13]. La géométrie projective, géométrie de la perspective, devient aussi modélisable par l'algèbre linéaire : un espace projectif se construit à l'aide d'un espace vectoriel grâce à un processus d'identification des points suivant une règle de perspective. Les espaces projectifs sont généralisés aux dimensions quelconques. La géométrie projective est une géométrie non euclidienne, dans le sens où le cinquième postulat d'Euclide y tombe en défaut. L'algèbre linéaire fournit non seulement un modèle pour la géométrie euclidienne, mais aussi, une ouverture vers un monde plus vaste.
Remise en cause de la géométrie d'Euclide
L'approche linéaire n'est pas une remise en question des conceptions euclidiennes. Elle permet au contraire de généraliser celles-ci, d'étendre leur portée, et de les enrichir en retour. Un autre grand mouvement historique remet en cause la formalisation euclidienne.
Le cinquième postulat
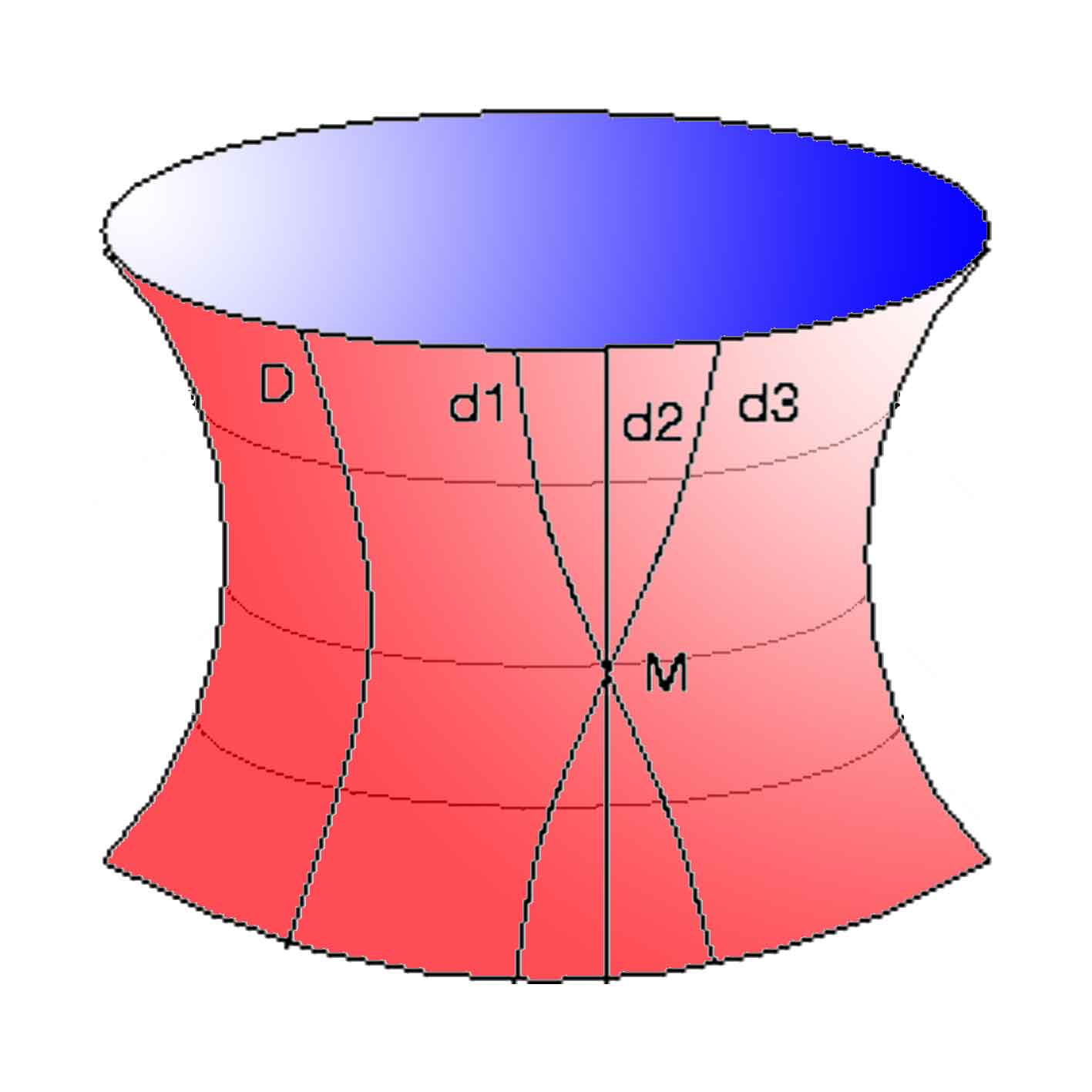
Article détaillé : Géométrie non euclidienne. Exemple de géométrie hyperbolique.
Exemple de géométrie hyperbolique.Le XIXe siècle voit l'apparition de nombreuses nouvelles géométries. Leur naissance résulte d'interrogations sur le cinquième postulat, que Proclus exprime de la manière suivante : Dans un plan, par un point distinct d'une droite d, il existe une unique droite parallèle à d. Ce postulat, admis par Euclide, et que l'intuition soutient, ne devrait-il pas être un théorème ? Ou, au contraire, peut-on imaginer des géométries où il tomberait en défaut ?
Un enjeu durant le XIXe siècle pour les mathématiciens, sera de parvenir à se détacher d'une intuition physique casuellement inféconde, ainsi que d'un respect inopportun des leçons des anciens, pour oser inventer de nouvelles conceptions géométriques ; celles-ci ne s'imposeront pas sans difficulté.
Dès le début du siècle Carl Friedrich Gauss (1777-1855) s'interroge sur ce postulat[14]. En 1813 il écrit : Pour la théorie des parallèles, nous ne sommes pas plus avancés qu'Euclide, c'est une honte pour les mathématiques. En 1817 il semble que Gauss ait acquis la conviction[15] de l'existence de géométries non euclidiennes. En 1832, le mathématicien János Bolyai (1802-1860) rédige un mémoire sur le sujet[16]. L'existence d'une géométrie non euclidienne n'est pas formellement démontrée, mais une forte présomption est acquise. Le commentaire de Gauss est éloquent : Vous féliciter reviendrait à me féliciter moi-même[17]. Gauss n'a jamais publié ses résultats, probablement pour éviter une polémique. Indépendamment, Nicolaï Lobatchevsky (1792-1856) devance Bolyai sur la description d'une géométrie analogue dans le journal russe Le messager de Kazan en 1829. Deux autres publications[18],[19] sur le sujet n'ont néanmoins pas plus d'impact sur les mathématiciens de l'époque.
Bernhard Riemann (1826-1866) établit l'existence d'une autre famille de géométries non euclidiennes pour son travail de thèse sous la direction de Gauss. L'impact reste faible, la thèse n'est publiée que deux ans après sa mort.
Les géométries de Lobatchevsky et Bolyai correspondent à des structures hyperboliques où il existe une infinité de parallèles passant par un même point. Cette situation est illustrée dans la figure ci-contre, les droites d1, d2 et d3 sont trois exemples de parallèles à D passant par le point M. Le cas riemannien correspond au cas elliptique où aucune parallèle n'existe.
L'unification de Klein
Article détaillé : programme d'Erlangen. Université d'Erlangen.
Université d'Erlangen. Félix Klein.
Félix Klein.La situation est devenue confuse, les Éléments ne sont pas en mesure de rendre compte d'une telle diversité. On compte nombre d'espaces géométriques : les espaces vectoriels euclidiens, les espaces affines euclidiens, les espaces projectifs, les géométries elliptiques et hyperboliques, plus quelques cas exotiques comme le ruban de Möbius. Chaque géométrie possède des définitions différentes, mais présentant de nombreuses analogies et aboutissant sur des séries de théorèmes plus ou moins différents selon les auteurs et les géométries. La fin de la suprématie euclidienne engendre un important désordre, qui rend la compréhension de la géométrie difficile. Un jeune professeur de 24 ans, Felix Klein, (1848-1925) nouvellement nommé professeur à l'université d'Erlangen, propose une organisation pour toutes ces géométries dans son discours inaugural[20]. Ces travaux ont cette fois un vaste retentissement sur la communauté scientifique, la suprématie euclidienne disparaît et la polémique née de la remise en cause du cinquième postulat s'éteint. Son travail implique une réforme de la formalisation des espaces euclidiens. Il utilise les travaux de James Joseph Sylvester (1814-1897) sur ce que l'on appelle maintenant les produits scalaires[21]. La géométrie euclidienne reste d'actualité au prix d'une refonte profonde de sa construction.
Dans son programme d'Erlangen, Felix Klein trouve le critère permettant de définir toutes les géométries. Les gains attendus sont au rendez-vous. Les géométries sont classifiées, celles qui se présentent comme des cas particuliers apparaissent et les théorèmes génériques peuvent s'exprimer sur l'intégralité de leur domaine d'application ; en particulier, l'espace vérifiant l'axiomatique euclidienne est la limite qui sépare les familles de géométries hyperboliques de Bolyai et Lobatchevsky des géométries elliptiques de Riemann.
Klein définit une géométrie euclidienne par l'ensemble de ses isométries, c'est-à-dire les transformations laissant les distances invariantes. Cette approche caractérise parfaitement cette géométrie. Les isométries bénéficient d'une structure de groupe géométrique. Dans le cas euclidien cette formalisation est équivalente à la donnée d'un produit scalaire, et si elle est d'un maniement plus abstrait, elle est aussi plus générale. Définir une géométrie par un groupe de transformations est une méthode souvent efficace.
Euclide et la rigueur
 Théorème de Pythagore.
Théorème de Pythagore.La dernière réforme de la géométrie euclidienne est celle de la logique. La critique ne porte pas tant sur les démonstrations d'Euclide mais sur l'absence de fondements suffisants pour une preuve rigoureuse. Elle ne date pas d'hier : Eudoxe de Cnide (408 355 av. J.-C.) et Archimède (287 212 av. J.-C.) ajoutent celui maintenant appelé axiome d'Archimède[22]. Christophorus Clavius (1538-1612) note l'absence d'un postulat pour établir son traité des proportions. Rien ne garantit l'existence des segments proportionnels, sujet central du livre V[23]. Gottfried Wilhelm von Leibniz (1646-1716) remarque qu'Euclide utilise parfois l'intuition géométrique pour pallier l'absence de certains postulats, par exemple dans sa méthode de construction d'un triangle équilatéral. Il construit deux cercles tel que le centre de chacun est un point de l'autre[24]. Il admet sans preuve que les deux cercles possèdent une intersection. Gauss remarque que la relation entre deux points d'un cercle est bien mal formalisée et qu'elle ne se généralise pas à la sphère[24].
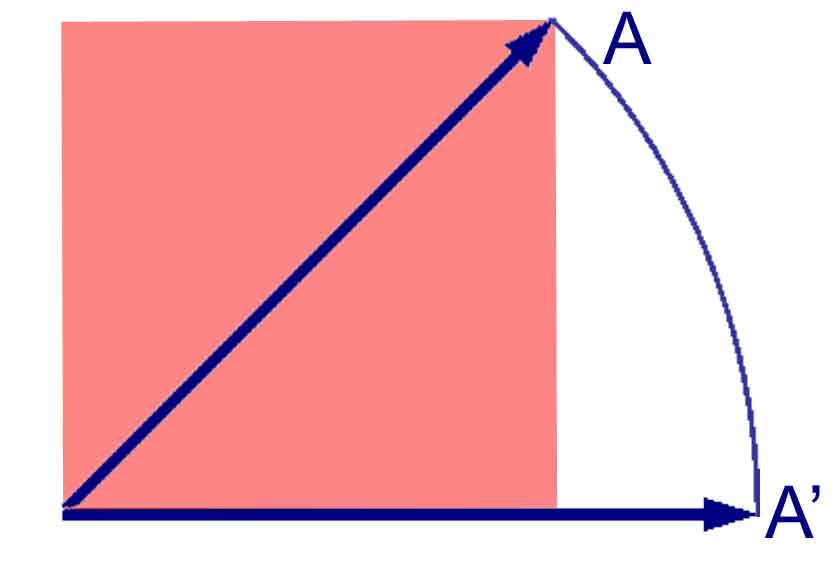
 Cas où les nombres ne sont pas des rationnels.
Cas où les nombres ne sont pas des rationnels.La fin du XIXe siècle voit non seulement la multiplication de critiques de cette nature, mais aussi la formulation de postulats manquants. Georg Cantor (1845-1918) et Richard Dedekind (1831-191-) montrent la nécessité d'un postulat de la continuité et le formalisent[25]. Un exemple du manque est donné par le théorème de Pythagore dont la figure de gauche illustre une démonstration. Les triangles IBC et AEC possèdent la même aire car l'un correspond à la rotation d'un quart de tour de l'autre. Cette assertion n'est pas démontrable dans le cadre axiomatique choisi par Euclide. Comme illustrée sur la figure de droite, la rotation d'un huitième de tour de la diagonale d'un carré de côté 1 ne possède pas, a priori son extrémité A' si l'ensemble de nombres choisi n'est pas celui des réels mais des rationnels. Chez Euclide aucune indication n'est donnée sur la nature des nombres utilisés, aucune information ne permet non plus d'établir qu'une rotation ou une symétrie conserve les distances.
La réponse de Hilbert
Article détaillé : Axiomes de Hilbert. David Hilbert.
David Hilbert.À l'aube du XXe siècle la connaissance des manques de la formalisation euclidienne, ainsi que les différents éléments de solutions sont suffisamment connus pour permettre une construction rigoureuse. Les mathématiciens David Hilbert (1862 1943) et Moritz Pasch (1843 1930) sont à l'origine de ce travail[26].
La construction doit être suffisante pour démontrer les théorèmes de géométrie sans appel à l'intuition, l'application de règles logiques est la seule méthode autorisée. Pasch s'exprime ainsi :
« On énoncera explicitement les concepts primitifs au moyen desquels on se propose de définir logiquement les autres. On énoncera explicitement les propositions fondamentales (postulats) grâce auxquelles on se propose de démontrer logiquement les autres propositions (théorèmes). Ces propositions fondamentales doivent apparaître comme de pures relations logiques entre les concepts primitifs, et cela indépendamment de la signification que l’on donne à ces concepts primitifs.[24] »
Si une construction est suffisamment solide pour ne plus nécessiter l'apport de l'intuition, le vocabulaire choisi n'a pas d'importance. Hilbert l'exprime ainsi :
« On devrait pouvoir parler tout le temps, au lieu de point, droite et plan, de table, chaise et chope.[24] »
Hilbert publie un article[27] sur la question. Dans son introduction, il se fixe comme objectif, la construction d'un système d'axiomes modélisant le plan et répondant à une triple contrainte : être simple, complet et indépendant. Si le mot complet n'est pas défini, Hilbert indique néanmoins, quelques mots plus loin, que ce système doit permettre la démonstration des théorèmes principaux de la géométrie euclidienne. Le système d'axiomes est simple au sens où il est aisé de savoir quels axiomes sont nécessaires à l'établissement des théorèmes. Il est indépendant au sens où la suppression d'un postulat autorise l'existence de nouvelles géométries incompatibles avec les propriétés euclidiennes.
Dans un premier temps, Hilbert construit un système contenant cinq groupes d'axiomes dont le dernier concerne la continuité. Ce dernier peut être enrichi ou non d'un axiome équivalent à la complétude. Il montre alors la compatibilité des groupes d'axiomes. Ce terme signifie qu'il existe au moins une géométrie satisfaisant tous les axiomes. Hilbert construit un univers algébrique, correspondant à un plan affine sur un corps de nombre particulier. Il contient les rationnels et tout nombre de la forme 1 + ω2 admet une racine carrée. Cet univers satisfait à l'intégralité des groupes d'axiomes proposés, ce qui serait impossible si les postulats n'étaient pas compatibles.
L'indépendance est démontrée par la construction de géométries fondées sur une partie seulement de la base axiomatique. Elles diffèrent alors de la géométrie euclidienne. Hilbert démontre rigoureusement l'existence de géométries qu'il qualifie de non euclidiennes, non archimédiennes et non pascaliennes. Si l'indépendance de chaque groupe d'axiomes est prouvée, chacun des groupes contient lui-même plusieurs postulats (à l'exception du Vème qui n'en contient qu'un). Issai Schur (1875 1941) et Eliakim Hastings Moore (1862 1932) démontrent indépendamment[28],[29] qu'un des axiomes était redondant.
Vers d'autres géométries
Article détaillé : Géométrie non euclidienne.Le concept de géométrie est maintenant appliqué à un vaste ensemble d'espaces. Si la remise en question du cinquième postulat est l'exemple historique qui donne un contenu à la notion de géométrie non euclidienne, une analyse plus précise montre l'existence de quantité d'autres cas non envisagés par Euclide respectant néanmoins le cinquième postulat.
Dans le cas des espaces vectoriels, le corps de nombres peut être modifié, la distance est parfois choisie de manière à posséder un nouveau groupe d'isométries, le nombre de dimensions peut devenir infini.
Il existe en outre de nombreux cas où l'espace n'est pas un espace vectoriel ; Klein formalise des géométries non orientables ; Georg Cantor (1845-1918) découvre un ensemble triadique dont la dimension n'est pas entière et qui maintenant est classé dans la catégorie des géométries fractales. La topologie ouvre la porte à la construction de nombreux autres cas.
C'est la raison pour laquelle le terme de géométrie non euclidienne tombe petit à petit en désuétude durant le XXe siècle. Il est maintenant entré dans l'usage de décrire une géométrie par les propriétés qu'elle possède et non pas par une, devenue très spécifique et qu'elle n'aurait pas, à savoir son caractère euclidien.
Les exemples suivants sont parmi les plus fréquemment utilisés.
Dimension infinie
Article détaillé : Espace de Hilbert.Les espaces de fonctions à valeurs réelles disposent d'une structure d'espace vectoriel. Il est fécond de les étudier avec des outils géométriques. Il est possible d'y associer une distance issue d'un produit scalaire par exemple si les fonctions sont de carré intégrable. Ce produit scalaire est défini de la manière suivante :
Dans un tel espace, le théorème de Pythagore se généralise et a permis à Joseph Fourier (1768-1830) de résoudre l'équation de la chaleur.
Cette approche, consistant à utiliser les outils de la géométrie pour résoudre des problèmes d'analyse est maintenant dénommée analyse fonctionnelle. De multiples distances différentes sont définies sur ces espaces, engendrant alors des géométries distinctes. Suivant les propriétés plus ou moins fortes qu'elles possèdent, elles prennent pour nom espace de Hilbert, espace de Banach, espace préhilbertien ou espace vectoriel normé. L'espace de Hilbert est la généralisation la plus naturelle des géométries euclidiennes.
Espace hermitien
Article détaillé : Espace hermitien.Les nombres réels souffrent d'une faiblesse, le corps qu'ils forment n'est pas algébriquement clos. Cela signifie qu'il existe des polynômes non constants qui n'y ont pas de racine. Cette faiblesse complique l'analyse des applications linéaires d'un espace vectoriel dans lui-même. L'article sur les valeurs propres explicite cette difficulté. Une solution souvent utilisée consiste à généraliser le corps de nombres et à passer aux complexes. Cette méthode est utilisée en physique, par exemple pour l'étude des systèmes oscillants. La généralisation d'un espace euclidien aux nombres imaginaires est dénommée espace hermitien.
Espace de Minkowski
Articles détaillés : Espace de Minkowski et Cône de lumière. Le cône de lumière en relativité restreinte.
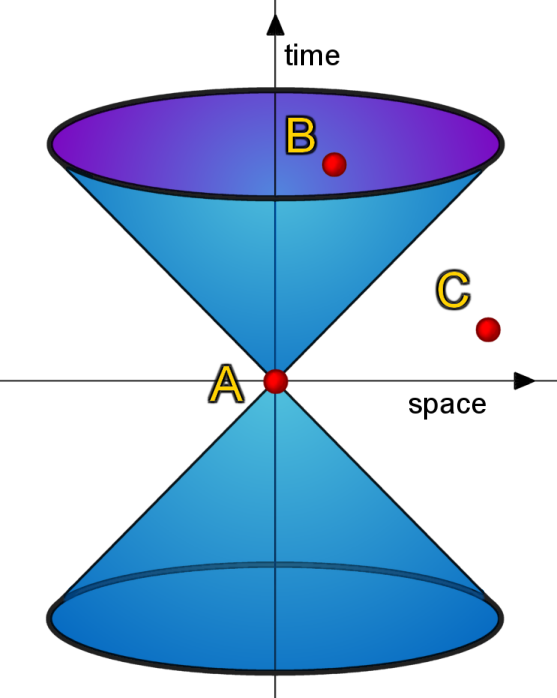
Le cône de lumière en relativité restreinte. Pour la géométrie associée à l'espace de Minkowski l'ensemble des points à égale distance spacio-temporelle d'un centre n'est plus une sphère mais un hyperboloïde.
Pour la géométrie associée à l'espace de Minkowski l'ensemble des points à égale distance spacio-temporelle d'un centre n'est plus une sphère mais un hyperboloïde.La physique de la relativité restreinte propose un monde régi par des lois différentes de celle de la mécanique classique. Il n'y est pas possible de dépasser une vitesse critique, celle de la lumière. Cette limite engendre de nombreuses conséquences. Pour reprendre l'exemple d'Albert Einstein (1879-1955) un voyageur dans un train en marche et se déplaçant dans le sens du train n'a plus, comme vitesse par rapport au sol, la somme exacte de la vitesse du train et de son déplacement, mais un tout petit peu moins[30].
La modélisation physique utilise un espace de dimension quatre contenant à la fois l'espace et le temps. Il est associé à une géométrie différente. Si l'on note x, y, z et ct les quatre coordonnées d'un point dans un repère orthogonal, en géométrie euclidienne le carré de la distance du point à l'origine est donnée par la formule : x2 + y2 + z2 + (ct)2, expression qui a le statut mathématique de forme quadratique. Dans le monde de la relativité restreinte, la formule : x2 + y2 + z2 - (ct)2, qui est aussi une forme quadratique, joue un rôle analogue. Ici, c désigne la célérité de la lumière et t une durée, la formule est bien homogène. Muni de cette forme, l'espace est dit de Minkowski.
La modification d'un signe dans l'égalité définissant la forme quadratique (le "carré de la distance"), change la nature de la géométrie associée : cette quantité n'est plus nécessairement positive. Pour aller du centre noté A sur la figure de droite au point C, il est nécessaire de dépasser la vitesse de la lumière. Le carré de la distance entre A et C est strictement négatif, cette distance est purement imaginaire. En effet, si le carré de la distance est strictement négatif, la vitesse nécessaire pour atteindre le point C à partir du point A est supérieur à celle de la lumière. En conséquence et dans le cadre de la relativité restreinte, ce point ne peut pas être en interaction avec A.
L'ensemble des points à distance (spacio-temporelle) nulle de A forme un cône appelé cône de lumière de A. Ce cône est constitué des points qui supposent un déplacement à la vitesse de la lumière pour être joints à partir du point A (dans sa partie supérieure, future) ; et de l'ensemble des points joignant A à la vitesse de la lumière (dans sa partie inférieure, passée).
Il correspond à la limite physique des points de l'espace-temps en interaction possible avec A :- L'intérieur supérieur du cône peut être vu comme l'ensemble des emplacements futurs possibles du point A, ou de l'ensemble des points qui seront causalement reliés avec A.
- L'intérieur inférieur comme l'ensemble des emplacements passés possibles de A, ou de l'ensemble des points causalement reliés à A.
Plus généralement, l'ensemble des points à égale distance (spacio-temporelle) de A est un hyperboloïde, alors que dans le cas euclidien l'ensemble des points à égale distance d'un centre, définit une sphère.
Variété
Article détaillé : Variété (géométrie). Sur une sphère, la somme des angles d'un triangle n'est pas égale à 180° : une sphère n'est pas un espace euclidien. Par contre, les lois de la géométrie euclidienne sont de bonnes approximations locales. Pour un petit triangle sur la surface de la Terre, la somme des angles est proche de 180°.
Sur une sphère, la somme des angles d'un triangle n'est pas égale à 180° : une sphère n'est pas un espace euclidien. Par contre, les lois de la géométrie euclidienne sont de bonnes approximations locales. Pour un petit triangle sur la surface de la Terre, la somme des angles est proche de 180°.Toutes les géométries ne satisfont pas le cinquième postulat d'Euclide. La surface d'une sphère donne un exemple immédiatement accessible. Le plus court chemin entre deux points se situe toujours le long d'un grand cercle dont le centre est celui de la sphère. Cette courbe joue donc le rôle de droite pour la géométrie de la sphère. Voilà une géométrie cohérente, correspondant à un cas réel. Cependant le cinquième postulat n'est plus vérifié. Dans cet exemple, deux « droites » non confondues possèdent toujours deux points d'intersection.
L'abandon du cinquième postulat est fondamental. Il est en effet souhaitable de considérer la sphère, non pas comme un sous-ensemble d'un espace euclidien de dimension 3 mais comme une géométrie à part entière, disposant d'une distance et d'une relation d'orthogonalité. Sans outil de cette nature, l'étude d'un tel espace devient plus délicate.
La formalisation mathématique est dérivée de l'exemple illustré dans la figure. Si l'étude se résume à une zone suffisamment petite, alors il est possible d'utiliser une carte plane, c’est-à-dire une représentation euclidienne. En se rapprochant suffisamment du point d'étude, celle-ci donne une représentation d'une précision aussi grande que voulue. Ainsi, un plan de Paris ne sera jamais rigoureusement exact car sur une sphère la somme des angles d'un triangle est toujours supérieure à 180 degrés. Cependant, la dimension de Paris (relativement à celle de la Terre) est suffisamment petite pour que l'erreur soit négligeable.
Ce mode de définition de la géométrie des espaces courbes, par la donnée d'une famille de cartes locales, peut être généralisé. On obtient ainsi une description d'espaces courbes usuels (courbes et surfaces telles que la sphère), mais aussi, la possibilité de construire par la même méthode des espaces courbes abstraits portant le nom de variétés. La géométrie riemannienne est la branche des mathématiques qui étudie les espaces courbes sur lesquels existent des distances et des angles, et qui portent le nom de variétés riemanniennes. La recherche et l'étude des plus courts chemins, ou géodésiques, est une des préoccupations importantes de cette branche.
L’astrophysique à grande échelle ne peut pas se contenter de la géométrie riemannienne. En théorie de la relativité générale, les modèles utilisés ne sont plus basés sur la géométrie euclidienne, mais le sont plutôt sur l'espace de Minkowski. Le cadre d'étude est toujours un espace courbe (variété), mais on considère une forme quadratique qui n'est plus nécessairement positive ; la variété devient lorentzienne (ou, plus généralement, pseudo-riemannienne).
Ainsi, la gravitation se manifeste par la trajectoire incurvée suivie par une masse le long d'une géodésique non euclidienne.Voir aussi
Notes et références
- ↑ Deledicq André Traduction d'Euclide Peyrard 1804 les Eléments d'Euclide pour le collège et le Lycée Les éditions du Kangourou 1999.
- ↑ Ce résultat date d'avant les découvertes de la civilisation islamique : J.-L. Périllié La découverte des incommensurables et le vertige de l'infini Transcription d’une conférence qui a eu lieu le 16 mai 2001 à Grenoble p 18
- ↑ Amy Dahan-Dalmedico, Jeanne Peiffer, Une Histoire des mathématiques - Routes et dédales, Seuil, coll. « Points Sciences », 1986 (ISBN 2020092380)[détail des éditions], p 90
- ↑ Les techniques utilisées se fondent largement sur l'algèbre des polynômes. Gauss les considère néanmoins comme de l'arithmétique, il écrit à ce sujet : La théorie de la division du cercle, ou des polygones réguliers ... n'appartient pas par elle-même à l'Arithmétique, mais ses principes ne peuvent être puisés que dans l'Arithmétique transcendante. Recherches arithmétiques p 15.
- ↑ Leone Battista Alberti De la peinture 1435.
- ↑ Daniel Arasse Léonard de Vinci 2003 Hazan.
- ↑ Blaise Pascal Essay pour les coniques 1640.
- ↑ Isaac Newton Philosophiae naturalis principia mathematica 1687.
- ↑ E Knobloch, Zur Vorgeschichte der Determinantentheorie, Theoria cum praxi : sur la relation entre la théorie et la pratique aux 17eme et 18eme siècles IV (Hannover, 1977), 96-118.
- ↑ Bernard Bolzano Betrachtungen über einige Gegenstände der Elementargoemetrie, « Considérations sur quelques objets de la géométrie élémentaire », 1804
- ↑ Arthur Cayley Géométrie à n dimensions 1843.
- ↑ William Rowan Hamilton « Sur les méthodes générales de résolution en dynamique » 1834.
- ↑ Jean Poncelet Traité des propriétés projectives des figures 1822.
- ↑ G W Dunnington Carl Friedrich Gauss : Titan of Science New York, 1955.
- ↑ C Houzel Un siècle de géométrie Berlin 1992.
- ↑ János et Farkas Bolyai Tentative d'introduction d' éléments de mathématiques pures pour la jeunesse studieuse Chapitre sur la géométrie non euclidienne. 1832
- ↑ J J Gray Studies in the history of mathematics Washington, DC, 1987, p 37-60.
- ↑ Nicolaï Lobatchevsky Géométrie imaginaire 1837.
- ↑ Nicolaï Lobatchevsky Investigations géométriques sur la théorie des parallèles 1840.
- ↑ Felix Klein étude comparée de différentes recherches en géométrie 1872.
- ↑ James Joseph Sylvester théorie sur les invariants algébriques 1852.
- ↑ J.-L. Gardies Pascal entre Eudoxe et Cantor (Problèmes et controverses) J. Vrin 1984 p 11 à 24 (ISBN 2711608441).
- ↑ Sabine Rommevaux, Clavius, une clé pour Euclide au XVIe siècle. Paris, J. Vrin, 2005. "Mathesis" (ISBN 2711617874)
- ↑ a , b , c et d H. Languereau Les 100 ans de la géométrie de Hilbert Mathématiques vivantes Bulletin IREM n° 66 2001 p 3 lire.
- ↑ J. Dhombres Nombre, mesure et continu Fernand Nathan 1978 p 231-238.
- ↑ Si d'autres penseurs ont apporté leur pierre sur le sujet, pour Jean Dieudonné, Hilbert et Pasch restent les principaux acteurs : Pour l'honneur de l'esprit humain Hachette Littérature 1987 (ISBN 2010119509).
- ↑ David Hilbert Grundlagen der Geometrie 1ière éd. 1899, B.G. Teubner, Leipzig version anglaise.
- ↑ Issai Schur Ueber die Grundlagen der Geometrie Math. Annalem, Vol. 55 p. 265 1902.
- ↑ Eliakim Hastings Moore On the Projective Axioms of Geometry Transactions of the Amer. Math. Society 1902.
- ↑ La relativité, Gauthier-Villars (1956).
Liens externes
- (fr) Euclide. Les quinze livres des éléments géométriques d'Euclide : plus le livre des donnez du mesme Euclide aussi traduict en françois par ledit Henrion, et imprimé de son vivant, traduction de 1632, site Gallica
- (fr) Espace euclidien sous l 'aspect des formes bilinéaires dans les mathématiques.net
- (fr) Espace euclidien sous l'aspect du produit scalaire dans math.sciences.univ-nantes
- (fr) Lecture algèbrique des propriétés euclidiennes Une approche axiomatique différente de celle de Hilbert
- (fr) Espace euclidien et André Weil La vision de Nicolas Bourbaki sur les espaces euclidiens
- (fr) La critique des éléments d'Euclide
- (fr) Biographie d'Euclide d'Alexandrie
- (fr) La géométrie euclidienne par l'informatique
Références
- Euclide Les Éléments Traduction F Peyrard 1804 F. Louis
- R. Goblot Thèmes de géométrie: Géométrie affine et euclidienne - agrégation de mathématiques Masson
- Marcel Berger, Géométrie [détail des éditions]
- (en) Michael Artin, Algebra [détail des éditions]
- Serge Lang, Algèbre, Dunod, 2004, 926 p. (ISBN 2100079808)[détail des éditions]
- (en) R. J. Trudeau The non-Euclidean revolution Berkhauser
- (en) M. J. Greenberg Euclidiean and non-Euclidiean geometries W.H. Freeman and Company
Liens internes
Articles de mathématiques en rapport avec l'algèbre bilinéaireEspace euclidien • Espace hermitien • Forme bilinéaire • Forme quadratique • Forme sesquilinéaire • Orthogonalité • Base orthonormale • Projection orthogonale • Inégalité de Cauchy-Schwarz • Inégalité de Minkowski • Matrice définie positive • Matrice semi-définie positive • Décomposition QR • Déterminant de Gram • Espace de Hilbert • Base de Hilbert • Théorème spectral • Théorème de Stampacchia • Théorème de Riesz • Théorème de Lax-Milgram • Théorème de représentation de Riesz
 Portail de la géométrie
Portail de la géométrie

La version du 16 janvier 2008 de cet article a été reconnue comme « bon article », c'est-à-dire qu'elle répond à des critères de qualité concernant le style, la clarté, la pertinence, la citation des sources et l'illustration. Catégories : Bon article | Algèbre bilinéaire | Géométrie affine | Géométrie euclidienne | Logique mathématique










Wikimedia Foundation. 2010.