- Liaison 16
-
La Liaison 16 (L16) est un standard de liaison de données tactiques de l'OTAN pour l'échange d'informations tactiques entre des unités militaires.
Le contenu de sa messagerie et le protocole d'émission sont définis par le STANAG[acro 1] 5516 pour l'OTAN et le MIL-STD-6016 pour les États-Unis.
Sa mise en œuvre opérationnelle est définie dans le document OTAN ADatP[acro 2]-33[1] qui est un ensemble de procédures permettant la mise en œuvre d'un réseau de liaisons de données tactiques multiliaisons et de l'ADatP-16 propre à la Liaison 16. L'ADatP-33 est l'héritier du JMTOP américain[2],[acro 3].
Positionnement de la Liaison 16 dans le réseau des armées
La Liaison 16 est, avec la Liaison 22 et la liaison J-over-IP (IP pour Internet Protocol) une des trois Liaisons de Données Tactiques[trad 1] mises en œuvre par les forces interarmées, utilisant les données (c'est-à-dire le vocabulaire) de série-J. Avec ces autres liaisons Tactiques la L16 participe au Joint Data Network (en).
 Arthur K. Cebrowski
Arthur K. Cebrowski
- Aux États-Unis, les liaisons de données tactiques de la série-J (rassemblées en un réseau tactique multiliasons[trad 2] fonctionnant comme un réseau logique unique) forment le média de référence pour la transmission des données tactiques dans la Global Information Grid, concept élaboré dans le cadre du Network Centric Warfare (NCW). Les fonctions des plates-formes C2[acro 4] s'intègrent pleinement dans l'architecture du C4ISR ; cela devrait se traduire à terme, par le regroupement des trois terminaux de communication au sein du MIDS (en) JTRS. Aux États-Unis, l'ancienne appellation Tadil-J[3] a été abandonnée au profit de l'appellation OTAN Liaison 16.
La L16 n'est pas seulement une amélioration technique et sémantique des liaisons de données tactiques pré-existantes (Liaison 11, Liaison 4...), il s'agit bien plus de l'application au niveau tactique du principe défini par l'amiral Arthur K. Cebrowski (en)[4] de la vitesse de commandement rendue possible par une supériorité dans le domaine de l'information[5].
- Quant à la pensée du Vice-amiral concernant la condition indispensable à la participation d'une plate-forme aux opérations sur un théâtre d'opérations, elle est parfaitement synthétisée dans cette déclaration lorsqu'il était le chef d'état major des armées J6 :
« Si vous n'avez pas de capacité Liaison 16, vous n'êtes pas le bienvenu sur le champ de bataille des États-Unis. En fait, vous serez considéré comme un générateur de tirs fratricides, une menace pour les forces amies ou de coalition[trad 3]. »
-
- L'application de ces principes mis en œuvre par la L16, est parfaitement décrite par Michael W. Kometer, Lieutenant-colonel, USAF dans son livre Command in Air War: Centralized versus Decentralized Control of Combat Airpower[6].
- En Europe, sous l'impulsion des forces de Grande-Bretagne, l'OTAN tente de promouvoir la notion de NEC (en).
- Le NEC souligne la volonté des européens de garder l’homme au cœur du dispositif des systèmes complexes[7]
En résumé, la L16
- est le moyen d'identification indispensable sur le théâtre d'opération
- permet l'échange de données tactiques entre tous les niveaux de la chaîne de commandement
- autorise une rapidité de frappe rendue possible par une vue complète de l'image tactique partagée par tous les acteurs sur le terrain
La mise en service de la L16 au sein des forces permet l'application d'un des principes fondateurs de la guerre en réseau : "Commandement centralisé / Exécution décentralisée[8]". Les enjeux sous-tendus sont clairement exposés dans cet article en français de la Revue militaire canadienne - Été 2001[9].
Le combat aérien change totalement de dimension avec la mise en œuvre de la L16 sur les plates-formes Non-C2. Les conséquences sont telles qu'un avion de chasse non-équipé de la L16 ne possède plus désormais qu'une valeur valeur militaire très faible voire nulle, s'il doit faire face à un autre avion lui-même équipé d'un système équivalent. Cela a été mis en évidence par le NSRD de la RAND Corporation, dans le document intitulé Network-Centric Operations Case Study Air-to-Air Combat With and Without Link 16[10].
 La L16 participe au Joint Data Network
La L16 participe au Joint Data NetworkLiaison J-Over-IP
Pour être transmis au protocole IP, les messages L16 contenant des données de la série-J sont encapsulés dans un message compatible au protocole Internet. Cette capacité appelée JRE [11] est définie par une norme américaine (JREAP (en) C) ou MIL-STD 3011. Le JRE est très consommateur en termes d'utilisation de la Bande Passante ou de débit binaire.
La liaison J-over-IP a pour objectif :
- d'optimiser la bande passante, en utilisant des paquets IP adaptés aux réseaux terrestres IP et d'autre part,
- d'éviter les répétitions du contenu utile pour une utilisation optimisée des formes d'ondes IP, dont certaines sont toujours en cours de développement[12],[13]. (Voir en particulier le programme TTNT[14],[acro 5] bien que l'US Air Force ait préféré le MADL (en) pour sa liaison inter patrouille du F-22 Raptor[15],[16] et du F-35 Joint Strike Fighter[17]).
Cette optimisation évite en particulier les répétitions des contenus utiles en transmettant en un seul message toutes les informations qui en liaison 16 nécessitent la transmission de plusieurs messages de trois mots maximum chacun, dans la configuration la plus sécurisée.
- Chaque message Liaison 16 contient obligatoirement un en-tête[trad 4] et un mot Initial qui sont suivis des mots d'extension ou des mots complémentaires[3],[18]
- L'ensemble des données associées à une piste pouvant nécessiter jusqu'à la transmission de neuf mots, la transmission de la totalité de l'information peut nécessiter une succession de cinq messages de trois mots chacun contenant obligatoirement l'en-tête et le mot initial. Cela entraîne donc cinq répétitions à l'identique, du mot Initial et de l'en-tête du message, ce qui dans le cadre du JRE s'avère être coûteux en termes de bande passante ou plus précisément en termes de débit binaire.
Opérations majeures impliquant les armées françaises et mettant en œuvre la Liaison 16
Afghanistan 2007, 2010
Le 10 avril 2007, un article du journal "Le monde"[19] décrivait ainsi les conditions de départ en mission des avions de chasse :
« les avions de la coalition se contentent de gagner le ciel afghan, attendant que le commandement au sol leur assigne une mission de surveillance, de reconnaissance photographique, de "show of force" ..., ou de bombardement d'objectifs. »
Les avions E2-C de la Marine Nationale ont pu recevoir en temps réel, les missions qui leur étaient assignées par le CAOC[acro 6] situé sur la base d'Al-Udeid au Qatar[20], par l'intermédiaire de la Liaison 16. L'aéronavale ne disposait pas de cette capacité sur les avions Dassault Rafale au standard F-1. L'assignation de mission par les E2-C vers ces plates-formes Non-C2, étaient transmises en phonie. L'arrivée des premiers Rafale au Standard F-2, à partir de mars 2007, fournira cette capacité[21],[22]
Les échanges en données de série-J, sur la perception de la situation tactique entre les différents échelons hiérarchiques, se décomposaient ainsi :
 Rafale, Super étandard et Hawkeye du Charles de Gaulle, 12 avril 2007
Rafale, Super étandard et Hawkeye du Charles de Gaulle, 12 avril 2007- Échanges entre Les plates-formes C2 et les plates-formes Non-C2 (Avion de chasse, Close air support, Avion ravitailleur):
- Liaison 16, Groupe de participation AIR CONTROL
- Liaison 16, Groupe de participation SURVEILLANCE (C2 vers C2 et C2 vers Non-C2)
- Transmission des pistes
- Transmission des points de référence
- Transmission des points d'urgence
- Échanges des plates-formes C2 vers le CAOC :
- Liaison 16, Groupe de participation SURVEILLANCE (en portée radio)
- JREAP-C Via satellite (hors portée radio)
- Transmission des pistes
- Transmission des points de référence
- Transmission des points d'urgence
 Forces de la coalition déployée pour l'opération ENDURING FREEDOM.
Forces de la coalition déployée pour l'opération ENDURING FREEDOM.- Échanges du CAOC vers les plates-formes C2 :
- Liaison 16, Groupe de participation SURVEILLANCE (en portée radio)
- JREAP-C Via satellite (hors portée radio)
- Selon les ROE (Rules of engagement), les autorisations d'engagement
- Les assignations de nouvelles missions
- Échange du CAOC vers le Centre de Commandement
- JREAP-C Via satellite
- JREAP-C Filaire
- Retour d'information (Reachback[23])
Tous ces échanges, effectués dans le même langage (les données de série-J), permettaient à tous les participants, un accès "sans-couture[trad 5]" à l'information quelle que soit la position du demandeur dans le réseau multiliaisons.
Libye - 2011 Opération « Harmattan »
Phases de l'opération mettant en œuvre la Liaison 16
 Un hélicoptère Dauphin apponte sur l'USS Mount Whitney durant l'opération "Odyssey Dawn" (21 mars 2011)
Un hélicoptère Dauphin apponte sur l'USS Mount Whitney durant l'opération "Odyssey Dawn" (21 mars 2011)Durant cette opération en Libye, la liaison 16 joue pleinement son rôle de maintien de connectivité dans la chaîne de commandement :
- Une vingtaine d'avions a été engagée le samedi 19 mars 2011 : huit Rafale, deux Mirage 2000-5, deux Mirage 2000-D, six ravitailleurs et un E3F Awacs. En plus de ces moyens aériens, deux frégates de défense aérienne, le Jean Bart et le Forbin, se sont positionnées au large de la Libye. Toutes ces plates-formes hormis les ravitailleurs sont équipées de la liaison 16[24].
- Les opérations menées en Libye le dimanche 20 mars 2011 par les aéronefs Non-C2 (deux patrouilles de deux Rafales appui sol, une patrouille de deux Rafales RECCO-NG et deux patrouilles de deux Mirage 2000-D) ont, selon l'état-major des armées, été coordonnées par une plate-forme C2 (AWACS)[25].
- L'arrivée du porte-avions Charles de Gaulle a permis la mise en place d'un réseau multi-liaisons du même type que celui mis en œuvre en Afghanistan.
- Cette opération a permis le déploiement du "Joint Range Extension" sur le Charles de Gaulle, lui assurant ainsi une fonction permanente de Reachback[23] des opérations au-dessus du territoire Libyen[26].
- Le 26 mars 2011, 21 aéronefs français, dont 16 chasseurs ont pris l'air pour intervenir en Libye : deux patrouilles (à deux appareils) de Mirage 2000D, deux de Rafale air, deux patrouilles mixtes Rafale/SEM, une patrouille de Rafale Marine en configuration "Reco" et un binôme de Mirage 2000-5, déployé depuis la Crète. Le tout, soutenu par quatre ravitailleurs et un AWACS. Le PACDG a par ailleurs effectué son premier ravitaillement à la mer (RAM), grâce au pétrolier ravitailleur La Meuse[27]. Dans ce contexte, il faut noter les patrouilles mixtes Rafale-M / Super Étendard. Cette configuration met en évidence un moyen de pallier l'absence de liaison 16 à bord des Super Étendards ; Le Rafale-M, seul aéronef de la patrouille connecté au réseau liaison 16, assure au sein de ce type de patrouille, le maintien du lien avec l'ensemble de la chaîne de commandement.
 Mirage 2000-5 Quatari
Mirage 2000-5 Quatari- Un Embraer R-99A grec (HAF : Hellenic Air Force), a été déployé en avril 2011 pour effectuer des missions de surveillance (AEW) et de contrôle en Libye, dans le cadre du maintien de la zone d'interdiction de vol[28],[29]. Pour la première fois en opération, il a intégré un réseau liaison 16 de l'OTAN. Les avions français E-2C et E-3F prennent régulièrement leur tour d’alerte parmi les avions de surveillance alliés. Leur mission principale est de veiller au respect de la no fly zone[30].
Du point de vue des États-Unis, l'opération en Libye appelée "Odyssey Dawn", démontre l'incapacité des nouveaux aéronefs (F-22, F-35) à participer aux opérations de l'OTAN[31],[32],[33], du fait de l'absence d'une connexion liaison 16 au profit de la liaison furtive intra-patrouille MADL (en). En fait, la question qui se pose pour les USA, est celle de l'efficacité de la course aux nouvelles technologies dans le domaine des liaisons de données tactiques, si les alliés des USA ne peuvent se mettre à niveau pour des raisons de coût. La position de l'US Navy sur ce sujet, a été partiellement exprimée lors de la journée de l'industrie sur la maîtrise de l'information, le 5 avril 2011[34].
Phases de l'opération où l'absence de la Liaison 16 a été caractérisée
Les hélicoptères de l'Armée de terre et de la Royal Army
Samedi 4 juin 2011 :
« Des hélicoptères de combat sous commandement de l'Otan ont été utilisés pour la première fois le samedi 4 juin dans des opérations militaires au-dessus de la Libye, dans le cadre de l'opération Protecteur unifié", a indiqué l'alliance atlantique dans un communiqué publié samedi à l'aube[36]. Des hélicoptères Apache britanniques ont participé à ces attaques aériennes, »
- a indiqué à Londres le ministère de la Défense.
Les APACHES britanniques sont équipés du système de communication BOWMAN (en)qui permet le transfert des données de leur situation locale vers le réseau liaison 16 grâce à l'Improved Data Modem (version IDM-501)[37] Des hélicoptères de l'armée française de type Tigre et Gazelle ont également conduit pour la première fois dans la nuit de vendredi à samedi des frappes au sol en Libye.
 AH-64 Apache
AH-64 Apache« L'engagement des hélicoptères français en Libye, à partir du 3 juin, a joué un rôle déterminant dans la campagne contre les forces pro-Kadhafi.... Les raids se composaient d'une dizaine d'hélicoptères (Gazelle, Tigre et Puma) et ils étaient commandés depuis un PC volant. Un Puma embarquait systématiquement une équipe de commandos de l'air (CPA 30) pour aller récupérer immédiatement les équipages qui auraient été abattus.... L'action des Français a été très différente de celles de leurs homologues de la British Army. Ceux-ci avaient déployés quatre Apaches sur un porte-hélicoptères, mais ne semblent jamais en avoir engagé plus de deux simultanément. Les Apaches "travaillaient" comme des avions de combat, tirant leur missiles Hellfire sur des objectifs programmés depuis une altitude élevée.[38] »
Durant cette première opération interarmées[39] et internationale, tant pour l'Armée de Terre française que britannique, "C'était la première mission opérationnelle des Apaches de l'armée britannique depuis la mer[trad 6],[40]", les conséquences de l'absence de liaison 16 intégrée sur les systèmes de combat des hélicoptères des armées de terre britannique et française, seront étudiées soigneusement par le état-majors, lors des RETEX[acro 8]. En particulier, devraient faire l'objet d'études :- l'absence du moyen d'identification positive offert par les informations PPLI[acro 9],
- les difficultés de déconflictions entre des hélicoptères opérant dans le mêmes volumes et n'utilisant pas la même liaison de données tactiques,
- l'impossibilité de mener un contrôle digital par les AEW&C ou le JTARS (en) américain sur les hélicoptères, (par contre, le JSTARS coordonne parfaitement en liaison 16 les actions contre le sol des avions typhoons[41])
- l'impossibilité pour les hélicoptères à accéder à l'image tactique et unique fournie par la Surveillance liaison 16,
- l'absence de coordination digitale entre les hélicoptères et les avions de chasse chargés de leur protection,
- l'impossibilité de mettre en place un ReachBack[23] de série-J qui est particulièrement nécessaire pour les opérations de RESCO[acro 10]
Afin de disposer d'une parfaite intégration dans le réseau liaison 16, les APACHES britanniques pourraient rapidement être équipés de la radio MIDS JTRS dont la première intégration a été réalisée aux États-Unis en septembre 2010[42]. La première radio JTRS destinée aux AH-64D Block III de l'US Army, a été livrée par Lockheed Martin, le 27 juin 2011 au laboratoire d'intégration avionique de l'US Army. Cette radio offre à la liaison 16 une puissance de 200 W[43].
- L'intérêt d'embarquer un MIDS JTRS à bord d'un hélicoptère réside dans le fait que plusieurs radios (Voice V/UHF et Liaison 16) sont réunies dans un boîtier unique, de taille identique à celui d'un terminal MIDS.
- De ce fait, le débarquement des radios pré-existantes, libère le poids et le volume, nécessaires à l'intégration du boîtier MIDS JTRS.
Avant le déclenchement des opérations en Libye, l'intégration d'un poste MIDS JTRS sur les hélicoptères français n'était pas envisagée. Or, alors que "Les opérations en Libye témoignent, pour la France, du regain des actions à partir de la mer[44]", et que la France ne dispose pas d'un corps de "Marines" , l'interopérabilité entre l'Armée de Terre et la Marine Nationale devient incontournable, la convergence dans le domaine des liaisons de données tactiques ne peut éviter l'intégration de la liaison 16 à bord des hélicoptères de l'ALAT[acro 11]. Les travaux de l'ALAT menés depuis 2008[45] pourraient aboutir rapidement sur une décision de mise à niveau. La pertinence des conclusions de l'ETO[acro 12] COUGAR dont le but était de valider le besoin de liaison 16 pour l'ALAT, seront, sans doute, réévaluées[46].
Par contre, les Blackhawks de l'US Army et les MH-60 de l'US Navy, sont tout deux équipés de la liaison 16[47],[48],[49].
Les Atlantique 2
27 Juillet 2011
« Le 27 juillet 2011, les Atlantique 2 de la Marine Nationale ont atterri sur la base aérienne de La Sude en Crète. Avec un rythme de deux missions par jour depuis le 30 juin dernier, les Atlantique totalisent plus de 1000 heures de vol et plus de 55 guidages « hot » (avec armements réels) de chasseurs toutes nationalités confondues[50]. »
Le contrôle des avions de chasse a dû être opéré à la voix, en l'absence de Liaison 16 à bord des ATL2.
Utilisation
 Embraer R-99A Erieye (EMB-145 AEW&C) - Hellenic Air Force -
Embraer R-99A Erieye (EMB-145 AEW&C) - Hellenic Air Force -La Liaison 16 est utilisée par l'ensemble des pays de l'OTAN mais aussi par l'Arabie saoudite, l'Australie, la Corée du Sud, la Finlande, le Japon, Singapour, la Suède, la Suisse et Taïwan[51].
La Bulgarie, la Lituanie et la Roumanie devaient recevoir leur premier terminaux MIDS au début de 2012[52].
Par la possession d'avions AWACS, la France et le Royaume-Uni sont les nations ayant un rôle majeur dans la composante AIR de l'OTAN. Ces deux pays ont été rejoint par la Grèce au printemps 2009, avec l'entrée en service de 4 Embraer R-99, appareils déclinés de l'Embraer ERJ-145[53], dont l'interopérabilité avec le F-16 et le Dassault Rafale a été prouvée[54],[55]
- Un total de quatre avions Boeing 737 AEW&C Peace Eagle ont été commandés par la Turkish Air Force, avec une option de deux avions supplémentaires. Le 4 juin 2008, Turkish Aerospace Industries a terminé les modifications du second Peace Eagle[56].
- En décembre 2009, l'Australie recevait son premier Boeing 737 AEW&C Wedgetail[57]. A terme la RAAF recevra 6 appareils[58]
Le Maroc devrait rejoindre le club fermé des utilisateurs de la Liaison 16 dans le cadre de l'achat de 24, F-16 Block 50/52[59].
 IADS - Station de Bolafjall -
IADS - Station de Bolafjall -Depuis 2006, les États-Unis protègent le volume aérien de l'Islande, par le système Iceland Air Defence System[60]. Les 4 stations radars situées à Miðnesheiði (is), Bolafjall (is), Stokksnes située près de Vestrahorn (is) et Gunnólfsvíkurfja, connectées en JREAP/C au CRC situé à Keflavík, mettent en œuvre la liaison 16[61].
La Norvège a développé le système NORGIL (en)[acro 13], qui permet la couverture de l'ensemble du pays par un réseau liaison 16, dont les terminaux MIDS sont reliés à un réseau JREAP/C[62].
Généralités
 Vue de la tranche tactique d'un E2-C -
Vue de la tranche tactique d'un E2-C -
Dans son standard actuel, la Liaison 16 permet donc l'échange de données tactiques complexes entre unités militaires (ou plates-formes) aériennes, terrestres et maritimes dans le cadre du Network Centric Warfare ou en français "Guerre en Réseau".Les acteurs L16 peuvent échanger leurs positions grâce aux messages PPLI[acro 9] ; l'échange du PPLI offre une certitude d'identification AMI en raison de la nécessité de posséder les clés de cryptage adéquates pour pouvoir participer au réseau.
La conception du réseau Liaison 16 privilégie l'élaboration d'une image "Opérative" et "Tactique" unique et cohérente. Ainsi, l'envoi via satellite[63] , en temps quasi-réel de l'image vers l'arrière ou Reachback[23] (c'est-à-dire vers le Pentagone pour les États-Unis, le SHAPE pour l'OTAN, le Centre de planification et de commandement des opérations pour la France), est facilité ; Le Reachback est la première application candidate à la "liaison J-over-IP"
La Liaison 16 est un important facteur d'interopérabilité entre unités militaires. De par sa nature de standard, elle facilite les opérations militaires en coalition en permettant à des unités militaires de différentes nations de communiquer entre elles avec un « langage » commun (les données de série-J).
Les plates-formes
 Plate-forme C2 : E2-C Hawkeye
Plate-forme C2 : E2-C HawkeyeLa Liaison 16 considère deux types de plates-formes :
- les plates-formes C2[acro 4] qui participent à l'élaboration d'une image tactique commune (E-3, E-2C, porte-avions, etc.)
- les plates-formes Non-C2 qui participent au réseau uniquement en tant que "senseur" et "arme" du C2 sous le contrôle duquel ils réalisent leur mission. (Le Dassault Rafale est une plate-forme Non-C2).
Cette considération sur les types de plates-formes mettant en œuvre les Liaisons de Données Tactiques de la série J, ici la Liaison 16, est essentielle à la compréhension du CONOPS qui dirige la mise en œuvre opérationnelles des Forces par le média de la Liaison 16. Dans la littérature spécialisée française, il était possible de lire autrefois qu'un pilote de Dassault Rafale considérait un AWACS comme un radar déporté[64]; le Concept d'opération de la Liaison 16 implique exactement le contraire (i.e le Dassault Rafale est le radar déporté de l'AWACS). L'acceptation de ce principe de base (La plate-forme C2 dirige les plates-formes Non-C2 et élabore l'image tactique qui alimente l'ensemble des plates-formes) a permis l'intégration de l'Armée française au sein des Forces de l'OTAN.
Les plates-formes C2
Rôle des plates-formes C2 dans l'élaboration de l'image tactique de la force
 Plate-forme C2 : FORBIN
Plate-forme C2 : FORBINSur le groupe de participation SURVEILLANCE, les plates-formes C2[acro 4] :
- Créent et identifient les pistes issues de leurs senseurs locaux (radars[acro 14], sonars[acro 15] etc.) ou déportés ("Target Sorting" reçus des plates-formes Non-C2 qu'elles contrôlent).
Il est essentiel pour le bon fonctionnement du réseau logique de série-J et particulièrement pour le réseau liaison 16, que l'élaboration de la piste soit effectuée par le système de direction de combat et non par les senseurs (radars ou plates-formes Non-C2) ; en effet, seul le système de direction de combat peut vérifier :
-
- si les données des différents senseurs (radars ou plates-formes Non-C2) fusionnent entre elles,
- si une nouvelle détection corrèle avec une piste d'origine externe déjà en cours de diffusion sur le réseau.
l'absence de ces deux vérifications avant la création d'une nouvelle piste locale, engendrerait une double désignation dont la répétition entraînerait une exclusion du réseau par le JICO.
- échangent les messages de gestion des conflits (Environnement/catégorie, Identité, IFF)
Une plate-forme C2, est désignée par le commandant de la force (le JFC : Joint Force Commander), pour assurer la fonction de "CDA" (Change Data Order Authority). Cette plate-forme est chargée de régler les conflits qui perdureraient entre des plates-formes tierces ; elle seule, est autorisée à transmettre des "CDO" (Change Data Order). Ainsi l'unicité de l'image tactique est assurée.
Une plate-forme C2, désignée par le commandant de la force SIA[acro 16], consolide les informations de guerre électronique, reçues sous la forme de données brutes (parametric) sur le groupe de participation EW, et les transmet consolidées (product) sur le groupe de participation SURVEILLANCE.
Missions des plates-formes C2
 Base aérienne 942
Base aérienne 942
Les plates-formes C2[acro 4] :- transmettent leur position, l'état de leurs équipements, leurs ressources en carburant etc. sur le groupe de participation PPLI-B.
- échangent des ordres sur le groupe de participation WEAPONS MANAGEMENT and COORDINATION.
- contrôlent les Non-C2 qui leur sont affectés sur le groupe de participation CONTROL (uplink).
La mission des plates-formes C2 est dépendante de celle du commandant de la force (JFC : Joint Force Commander) à laquelle elles participent.
Plates-formes C2 françaises
 Plate-forme C2 : SDCA E3-F (AWACS)
Plate-forme C2 : SDCA E3-F (AWACS)En France, la Liaison 16 est mise en œuvre sur les plates-formes C2 suivantes:
Plates-formes C2 de l'Armée de l'AIR
- Avions radar AWACS[acro 17] ou Système de détection et de commandement aéroporté
- Le Centre de Commandement de Contrôle et de Conduite Mobile (C3M)
- Le Centre de Détection et de Contrôle-Déployable (CDC-D)[65]
- Les CARS[acro 18] de l'ACCS[66][acro 19] en particulier celui de la Base aérienne 942 Lyon-Mont Verdun.
- Le système SAMP/T C2[acro 20], qui met en œuvre le missile ASTER appelé également MAMBA. L'escadron de défense sol-air (EDSA) 4/950 "Servance", de la Base aérienne 116 Luxeuil-Saint Sauveur, a été le premier équipé. Au total, les cinq EDSA qui seront maintenus en seront dotés : l'EDSA "Servance" de Luxeuil, l'EDSA "Sancerre" de Avord, l'EDSA "Crau" de Istres, l'EDSA "BARROIS" de Saint-Dizier et l'EDSA "Tursan" de Mont-de-Marsan[67].
Plates-formes C2 de la Marine nationale
- Avions radar E-2 Hawkeye
- Le porte-avions Charles-de-Gaulle
- Les frégates antiaériennes de Classe Cassard Jean Bart et Cassard
- Les frégates antiaériennes de la Classe Horizon Forbin et Chevalier Paul
- Les bâtiments de projection et de commandement (BPC) de la Classe Mistral (Mistral, Tonnerre et Dixmude) possèdent les structures d'accueil des moyens Liaison 16 indispensables à tout État-Major interarmées embarqué[68]. Ils disposent en particulier des structures permettant de déployer une cellule JICO
- à partir de 2011, Les FREMM - Frégates multi-missions - de la classe Aquitaine (frégate)[69]
 P 8A atterrit à Pax River
P 8A atterrit à Pax River- L'avion de patrouille maritime Atlantique 2 durant la deuxième phase de rénovation à mi-vie qui débutera en 2015[70], devrait être équipé de la Liaison 16 afin de se mettre à niveau
Les missions diverses de cette plate-forme devraient amener l'État-major de la Marine à l'équiper des 3 liaisons de données de série-J[75].
-
- La liaison 22 est particulièrement adaptée pour les missions de support au groupe aéronaval,
- La liaison 16 est indispensable aux opérations interarmées au-dessus de la terre ; c'est le seul moyen d'identification sûr dans le théâtre d'opération ; L'étude des RETEX de l'action des ATL2 lors de l'opération Harmattan apporte un nouvel éclairage sur ce besoin,
- la liaison J-Over IP ou le JRE est indispensable pour le renvoi de l'image tactique vers la métropole (Reachback) ainsi que pour les opérations de police maritime (dans le cadre de l'action de l'État en mer) où l'autorité judiciaire demande à être informé en temps réel.
Plates-formes C2 de l'Armée de Terre
- Certaines stations du système MARTHA[acro 22],[76]
- voir l'exemple du 57e régiment d'artillerie[77]. Depuis 2010, l'Armée de Terre est de plus en plus impliquée dans la problématique interarmées de la coordination dans la 3e dimension. La liaison 16 y tient une place prédominante, comme le soulignent les exercices du type NAWAS 2010. L'exercice NAWAS 2010 avait pour objectif principal d'accroître l'interopérabilité des moyens sol-air de l'armée de Terre, de l'armée de l'air et de la Marine nationale. Dans un environnement opérationnel réaliste et avec la participation d'artilleurs sol-air de l'armée belge, cet exercice a combiné des manœuvres et des tirs réels coordonnés grâce à la chaîne MARTHA[78].
-
- Le système MARTHA, étape 2 et ses systèmes d’information associés dont la liaison 16 consacrent avec l’arrivée du deuxième niveau de coordination (NC2), appelé aussi Centre de Niveau Haut MARTHA, la cohérence « globale » tant attendue de la chaîne de coordination 3D au profit du chef interarmes. MARTHA étape 2 comprend le rétrofit de 39 NC1 (niveau de coordination 1), la réalisation de 14 CNHM (centre de niveau haut MARTHA) et de 34 VPC (véhicules poste de commandement) ainsi que du logiciel associé SIRASA[79].
-
- En 2010, le 54e régiment d'artillerie quant à lui, bénéficiait déjà d’une bonne acculturation Marine grâce à sa spécificité « amphibie » et aux saisies d’opportunités d'entraînement liaison 16 avec les frégates anti-aériennes CASSARD et JEAN BART[80].
-
- Les régiments d'artillerie suivants sont également équipés de la Liaison 16 intégrée à MARTHA :
- En 2013, l'armée de Terre devrait disposer de la Liaison 16 sur l’hélicoptère HMPC[acro 23] (Commandement en vol). Il s'agit d'un hélicoptère de manœuvre doté d’un poste de commandement qui permettra de commander un groupe aéromobile au plus près du théâtre d’opérations[82].
L'ALAT doit intégrer le réseau Liaison 16 afin de participer à la gestion en temps réel, de l'espace de combat interalliés dans la troisième dimension. Cet espace inclut les aéronefs, l'artillerie, les moyens de défense sol/air et mer/air.
La volonté de l'Armée de Terre de mettre en œuvre la Liaison 16 sur ses hélicoptères, s'est concrétisée en octobre 2009 par la mise en place d'un équipement d'accueil d'un terminal MIDS à bord d'un hélicoptère AS-532 COUGAR. En mettant en œuvre la Liaison 16, l'Armée de Terre assurera le raccordement bilatéral de ses propres plates-formes équipées de liaisons de données tactiques propres (la liaison H[83]) et celles des autres armées qui utilisent la Liaison 16 . Celle-ci offrant comme principale caractéristique d'être une liaison standardisée de l'OTAN[84]. En attendant, lors de l'exercice ACTI L16 qui s'est déroulé du 1er au 3 juin 2010, L'Armée de Terre a évalué la capacité d'interconnexion de ses hélicoptères équipés Liaison H avec les plates-formes de l'Armée de l'Air équipées de la Liaison 16[85].
Les plates-formes Non-C2
Rôle des plates-formes Non-C2 dans l'élaboration de l'image tactique de la force
 Plates-formes Non-C2
Plates-formes Non-C2Les plates-formes Non-C2 partagent les informations de leurs détections radar, par l'échange de messages appelés "Target Sorting"
- au sein de la patrouille (pour les aéronefs) dans le groupe de participation NonC2-to-NonC2 appelé aussi Fighter-to-Fighter
- au sein du groupement de radars pour les batteries de missiles Sol/Air
Un second groupe de participation Non-C2-to-Non-C2 permet l'échange de détections avec d'autres patrouilles travaillant dans le même espace ; c'est particulièrement le cas dans le cadre de la COMAO. La COMAO[86],[acro 24] est l'exemple parfait des missions réalisées en conditions dégradées (conduites en l'absence d'une plate-forme C2), décrites plus loin.
 Exemple d'écran de Plates-formes Non-C2
Exemple d'écran de Plates-formes Non-C2Les plates-formes Non-C2 descendent leurs détections radar et de guerre électronique par la transmission de message "Target Sorting" vers la plate-forme C2 qui les contrôle. La plate-forme C2 vérifie si les détections radar fusionnent avec les plots de ses propres radars.
- S'il y a fusion de détections, la plate-forme C2 remonte le lien entre la piste diffusée sur le groupe de participation SURVEILLANCE et les "Target Sorting"
- S'il n'y a pas de fusion possible, la plate-forme C2 crée la piste et la diffuse sur le groupe de participation SURVEILLANCE et remonte le lien entre la piste diffusée et le "Target Sorting"
Les plates-formes Non-C2 ont accès à l'image tactique en mémorisant dans leur base de données (appelée en France "table des pistes"), les pistes élaborées par les plates-formes C2 et échangées sur le groupe de participation SURVEILLANCE. Il faut noter que l'écran d'un avion Non-C2 ne peut présenter raisonnablement au pilote qu'un maximum de 50 pistes ; au-delà, l'acquisition de l'information par le pilote, s'avère impossible. Cependant, dans le concept de guerre en réseau, la base de données des plates-formes Non-C2 doit mémoriser l'ensemble des pistes échangées sur le groupe de participation SURVEILLANCE. Ainsi,
- Lorsque le C2 contrôleur poussera la visualisation d'une piste d'intérêt (HIT : High Interest Track), celle-ci sera immédiatement visualisée sur l'écran ; dans le cas contraire, le délai de visualisation pourrait atteindre 12 secondes, délai excessif pour un avion de chasse[87].
- De même, un message d'alerte sur une piste non visualisée sur l'écran sera immédiatement présenté au pilote
- Enfin, tout engagement d'une tierce partie sur une cible sera également immédiatement présenté, si l'avion porteur "OwnShip" décidait d'entrer dans le domaine d'engagement.
Comme cela est décrit ci-dessus, lorsqu'un avion Non-C2 agit en tant que "radar du C2" qui le contrôle, le pilote est informé des mises à jour d'une de ses détections (Identification, IFF, Menace etc.), par la réception des messages-piste correspondants à cette détection, sur le groupe de participation SURVEILLANCE. Le rôle du Système de direction de combat de la plate-forme C2 est simplement d'informer le système de mission de la plate-forme Non-C2, du lien de correspondance entre la détection et la piste.
 Luftwaffe A310 MRTT
Luftwaffe A310 MRTTLa création et la mise à jour des informations concernant une piste est donc un privilège appartenant aux C2 ; les échanges de pistes ne sont réalisés que sur le groupe de participation SURVEILLANCE et par conséquence uniquement par les plates-formes C2 ; les plates-formes Non-C2 quant à elles, s'échangent des détections (Target sorting), sur le NPG "Non-C2-to-Non-C2".
Les opérations en Libye en 2011 ont pour la première fois, permis aux RAFALE de l'Armée de l'Air de mettre pleinement en œuvre les capacités offertes par la liaison 16[88].
La nécessité de disposer d'un radar à bord d'un avion de chasse est de plus en plus contestée. Cela est exprimé de plus en plus souvent aux États Unis :
« nous devrions nous intéresser à un développement important qui a lentement pris de l’ampleur au cours de la dernière décennie et dont les implications sont très larges. De plus en plus, les avions de combat sont interconnectés via des liaisons de données telles que la Liaison 16, standard de l’Organisation du traité de l’Atlantique nord. Autrefois, nous concevions et construisions des chasseurs air-air autour de leurs radars. En général, des portées de détection plus longues permettent un usage plus rapide des armes contre les aéronefs ennemis, mais sur un champ de bataille interconnecté, le capteur n’a pas besoin d’être sur le chasseur utilisant les armes[89]. »
Les avions ravitailleurs sont également des plates-formes Non-C2.
Dans le concept de la guerre en réseau, une plate-forme Non-C2 travaille toujours sous le contrôle d'une plate-forme C2. Les frappes dans la profondeur par des unités Non-C2 isolées, qui étaient admises à l'époque de la guerre froide, ne sont donc plus d'actualité depuis les opérations en Irak et en Afghanistan en 2003
Missions des aéronefs Non-C2
 Plate-forme Non-C2 : F-18
Plate-forme Non-C2 : F-18 Plate-forme Non-C2 : M2000-D
Plate-forme Non-C2 : M2000-DL'interopérabilité exige que toutes les plates-formes Non-C2 de même type soient interchangeables (par exemple un Dassault Rafale et un F-18) ; Cela exclut l'utilisation hétérogène des ressources temporelles du réseau liaison 16 par des plates-formes différentes. Un réseau Liaison 16 n'est en aucun cas conçu pour une plate-forme donnée (un Dassault Rafale ou un F-18) mais pour une force composée de types de plates-formes C2 (des AEW&C, des porte-avions) et Non-C2 (des bombardiers, des Batterie de missiles sol-air (SAM), des avions CAS ou des Chasseurs)
En pratique, les missions des aéronefs Non-C2 sont de deux types,
- les missions en conditions nominales qui s'effectuent sous le contrôle d'une unité C2,
- Les missions en conditions dégradées qui s'effectuent en l'absence d'un C2. Ce type de mission important en nombre à la fin de la décennie 2000 devrait diminuer fortement à l'avenir.
Le frein à la planification des missions en conditions nominales, outre les réticences des pilotes à accepter d'être sous contrôle en permanence, est essentiellement le coût de mise en œuvre des plates-formes C2.
Durant les premiers jours de la campagne de guerre, la COMAO restait en 2009, la mission en conditions dégradées, la plus courante exécutée par les aéronefs Non-C2. Cela est dû au fait, que les infrastructures objets des frappes sont connues et répertoriées. Cependant, pour faire face à toute menace nouvelle, il est préférable qu'une autorité embarquée sur une plate-forme C2 de type SDCA assure en temps réel, au nom du JFACC[90] le "retasking" éventuel ; cette autorité possède plus d'éléments et de personnels que le MC (Mission Commander) de la COMAO pour prendre la bonne décision sur la conduite à tenir ; le rang de cette autorité doit être supérieur à celui du MC pour permettre un exercice du commandement optimal.
Plates-formes Non-C2 françaises
 Plate-forme Non-C2 : RAFALE
Plate-forme Non-C2 : RAFALEEn France, la Liaison 16 est installée sur les plates-formes Non-C2 suivantes:
Plates-formes Non-C2 de l' Armée de l'Air
- Le Dassault Rafale
- Les Mirage 2000 D/-5F VI
(En 2009, la liaison 16 concernait 50 appareils. L’ensemble de la flotte Rafale, Mirage 2000D et Mirage 2000-5 sera équipée avant 2015[91].)
- Le SAMP/T Non-C2[acro 25], qui met en œuvre le missile ASTER
Un Avion ravitailleur équipé de la liaison 16 (plate-forme Non-C2) est un atout essentiel pour la conduite des missions aériennes. Cela est clairement indiqué dans les débats du livre blanc de la défense nationale[92] (page 27) et lors du Projet de loi relatif à la programmation militaire pour les années 2009 à 2014[93] où l'on peut lire :
« En Afghanistan, lorsque vous êtes avec un Mirage 2000 D, de nuit, avec quelqu’un qui hurle à la radio qu’il a besoin d’une bombe et que vous n’avez plus de pétrole, vous devez ravitailler et trouver avec vos seules jumelles de vision nocturne, un ravitailleur qui est tous feux éteints et ne parle pas. Nous n’avons en effet aucun autre moyen autonome de perception de la situation. »
 Plate-forme Non-C2 : EC-725 CARACAL
Plate-forme Non-C2 : EC-725 CARACALIl semble donc manquer à l'armée de l'air des avions ravitailleurs de type Airbus A310 MRTT ou Airbus A330 MRTT équipés de la liaison 16. Après une action de frappe, seule la liaison 16 permet à un bombardier de trouver sans recherche son avion ravitailleur grâce à la réception du message PPLI de ce dernier ou du point de référence indiquant le centre de son orbite ; la plupart de nations majeures ne se sont pas privées de ce moyen précieux[94].
- L'hélicoptère Eurocopter EC-725 Caracal de l'armée de l'air, dans sa version « forces spéciales[95] »
Plates-formes Non-C2 de la Marine Nationale
- Le Dassault Rafale Marine
Plates-formes Non-C2 de l'Armée de Terre
- Les stations MIDS-Terre
Les Drones
La demande des nations de l'OTAN de mettre en œuvre la Liaison 16 sur les drones de combat s'affirme de plus en plus. C'est le cas du drone Talarion (en) (Advanced UAV) dont la part française de développement est de l'ordre de 33% (Partenariat avec l'Allemagne et l'Espagne)
Ce drone serait équipé d'un radar.
Sa charge d'emport interne de 800kg, (1000 kg sous voilure et 500 kg sous fuselage) lui permettrait l'emport d'un terminal MIDS allégé[96].
Aux États-Unis, la réflexion sur la mise en œuvre des liaisons de données tactiques sur les drônes est bien avancée :
« Si nous avions un appui illimité de Predator et de Reaper armés, et si le spectre de la fréquence pouvait prendre en charge les liaisons de données, alors nous aurions une bonne chance de réduire significativement le nombre d’actifs à voilure fixe pilotés, sur le théâtre. Une mission menée par un Predator peut fournir jusqu’à 12 heures de couverture continue, sans ravitaillement, alors qu’il faudrait quatre formations de deux équipages d’avions pilotés volant par fenêtres de trois heures, et utilisant 113 000 kilos d’essence pour couvrir la même plage horaire. Nous pourrions, au moins, largement réduire le nombre d’heures de vol des actifs à voilure fixe pilotés, réduisant ainsi de façon significative le nombre de ravitaillement en vol[89]. »
Dans le BEM-48[acro 26] intitulé "Les drones aériens dans l'action maritime", l'émergence du besoin d'un drone MALE[acro 27] aéromaritime est souligné:
« Le capteur MALE aéromaritime doit être pensé au sein d'un système de systèmes... Le milieu maritime exige des charges utiles spécifiques .... Un vrai radar de surveillance maritime, un système électro-optique performant, un récepteur AIS[97]. »
La liaison 16 est le moyen naturel de transmettre les données issues de ces senseurs, à la force navale via la plate-forme C2 contrôlante.
Dans ce même bulletin, dans l'article intitulé "Les besoins de la Marine en drones aériens", il est indiqué qu'un drone SA2R[acro 28] peut tenir le rôle de relais de communication et donc de relais liaison 16, si cela s'avèrerait nécessaire.
Les Armes
En 2010, le JSTAR[acro 29] a démontré la capacité de mettre en œuvre des armes via la Liaison 16[98].
L'utilisation du logiciel "Link 16 Network Enabled Weapon" a permis l'échange de messages de ciblage, de commande et de contrôle, d'identification et d'information d'armes en vol[trad 7]. Pendant trois jours le JSTAR a effectué avec succès 13 séquences de tests avec deux F/A-18, deux Bombes à longue portée tirée à distance de sécurité[trad 8] et deux cibles instrumentées[trad 9].
Les terminaux de la Liaison 16
La Liaison 16 est mise en œuvre par des équipements spéciaux, appelés terminaux Liaison 16. Le terminal Liaison 16 cumule dans un seul équipement, les fonctions de MODEM, d'équipement de cryptologie, et d'émetteur UHF.
Les caractéristiques techniques des terminaux Liaison 16 sont définis dans le STANAG 4175
Terminaux Liaison 16 en service
Les principaux terminaux Liaison 16 sont :
- Le terminal JTIDS (en)[99] puissance d'émission de 200 watts (JTIDS 2M) pouvant être poussée à 1 kW en temps de guerre (JTIDS 2H)[100]. Il dispose de deux voies phonie (2,4 et 1 6 Kbits).
- Le terminal MIDS (en)[101] LVT[acro 30] 1 puissance d'émission de 200 watts pouvant être poussée à 1 kW en temps de guerre[102].
Il dispose d'une capacité TACAN et de deux voies phonie (2,4 et 1 6 Kbits).
On notera la capacité de mobilité disponible pour ce terminal[103], grâce à son intégration dans un caisson transportable ne dépassant pas un poids total (Caisson + Terminal) de 102 kg (227 livres).
Les terminaux MIDS ci-dessous sont identiques au LVT 1 avec les écarts suivants :
- Le terminal MIDS LVT2 utilisé par l'US Army (puissance d'émission de 1,20 ou 50 watts)[104] ; il est fourni dans un caisson d'accueil. Certains aéronefs le mettent également en œuvre.
- Le MIDS LVT11 également appelé MIDS LVT 2/11 est identique au MIDS LVT2, mais contrairement au MIDS LVT2, il dispose de phonie.
- Le terminal MIDS LVT3 appelé, aussi "Fighter Data Link[105]", est mis en œuvre sur les F-15 et est proposé à l'export par les USA sur les F-16 ; ce terminal ne possède pas de capacité de mise en œuvre des groupes de participation VOICE. Sa puissance d'émission est limitée à 50 watt[106]
 B-1B Lancer
B-1B Lancer- Le terminal MIDS J ou MIDS JTRS qui en mars 2010, durant la conférence intitulée "Joint Warfighting qui s'est déroulée les 11, 12 et 13 mai 2010, au centre de convention de Virginia Beach Va, a démontré son intéropérabilité avec les terminaux MIDS en service[107]. Le MIDS JTRS inclut toutes les capacités du MIDS-LVT plus les fonctions Link-16 Enhanced Throughput (ET), Frequency Remapping (FR)[108]. Depuis 2010, les États-Unis déploient simultanément le MIDS JTRS avec le système Common Link Integration Processing (CLIP) dans un ensemble appelé "Fully Integrated Data Link" (FIDL) qui intégre également le JREAP (en)[109],[acro 32]. En juin de 2010, le CLIP a accompli son premier vol d'essai comme composant du programme de modernisation du "B-1B Lancer" avec la Liaison de données complètement intégrée. Cette plate-forme transmet en temps réel sa position et échange des pistes, via le réseau Liaison 16 et le réseau de Satellite Jont Range Extension. Les opérations incluaient l'utilisation de la Liaison 16 pour allouer une cible objet de l'attaque et pour le lancement d'une arme JDAM[acro 33] simulée pour permettre l'attribution de mission[110]. A terminaison du programme, 66 B-1 et 76 B-52 devraient être équipés de ce système[111].
En mai 2011, consécutivement à un memorandum de décision d’acquisition d'une production limitée[trad 10] signé le 31 janvier 2011, la production de 42 MIDS JTRS par ViaSat (en) et Data Link Solution (en)[112], a commencé pour équiper les premiers F-18 de l'US NAVY, EC-130H de l'US AIR FORCE et RC 135 River Joint[113]. Les F-18 devraient recevoir leurs premiers MIDS JTRS durant le dernier trimestre 2011[114].
De 2015-2020, tous les MIDS LVT sont planifiés pour subir une mise à jour majeure, connue sous l’appellation "block Upgrade 2" . La mise à jour "block 2" fournira la nouvelle cartographie de sauts de fréquences, une bande passante améliorée, la modernisation cryptographique et d'autres mises à jour logicielles significatives pour assurer que la prééminence opérationnelle des terminaux MIDS dans les années à venir[115].
L'US Navy a développé le MIDS On Ship[116] qui permet aux systèmes de combat conçus initialement pour fonctionner face à un terminal JTIDS, de pouvoir travailler avec un MIDS LVT1. Le 2 novembre 2010, l'US Navy a accordé un contrat de maintenance des terminaux JTDIS, à Iowa's Data Link Solutions, une joint venture Rockwell Collins et BAE Systems, pour porter leur fin de vie en 2035[117]. Cependant, l'US Navy développe pour ses futures plates-formes, le système NGC2P/CDLMS[acro 34],[118].Un équipement léger (de l'ordre de 9kg[119]) appelé "Small Tactical Terminal" (STT)[120] permet de faire le pont entre le réseau "Liaison 16" et les forces au sol, travaillant en UHF[acro 35] (LOS : Line-of-sight (en)) (MIL-STD-188[121]-220 B/C/D) avec les PRC-117, PRC-152, ARC-210 (RT-1824), Improved Data Modem (IDM)[122]
- Le développement du SMTT[acro 36] est la première étape dans l'établissement d'un lien de série-J entre les aéronefs et les forces au sol. Le SMTT pourrait bien être le successeur des équipements IDM[123] et pallier l'incapacité actuelle, pour les forces au sol, d'accéder à la totalité de l'information. Le concept d'opération[124] du SMTT précise que la principale fonction est l'identification AMI des forces au sol.
Terminaux Liaison 16 en projet
- Le LMT2 (Link 16 Missile Tactical Terminal)[125]
- Ce concept envisage une petite radio tactique, développée par VIASAT[126], qui est basée sur la technologie de la Liaison 16. Ce terminal pourrait être installé dans les missiles de croisière et d'autres munitions guidées pour leur donner un système de navigation précis, un moyen de mises à jour des cibles mobiles et une capacité d'évaluation des dommages. Ce concept améliorerait aussi la perception de la situation AIR en permettant à tous les missiles et aux munitions guidées d'être inclus dans l'image tactique.
- Le Small Adaptable Form Factor Terminal utilise les dernières technologies pour assurer l'interopérabilité des véhicules au sol, des UAV et des aéronefs[127].
- La France envisage d'intégrer la liaison 16 dans son futur système de communication tactique. La Direction Générale de l'Armement a notifié le 6 décembre 2010 le marché DEPORT (Démonstrateur Reprogrammable de Radio Tactique) à la société Thalès. Il couvre les études d’élaboration du futur système de communications tactiques interarmées CONTACT (Communications numérisées Tactiques et de Théâtre), préparant la nouvelle génération d’équipements radio[128]. CONTACT prend en compte la liaison 16[129] car : le nouveau réseau tactique haut débit, sécurisé et interopérable avec l'OTAN doit remplacer à terme les systèmes PR4G, SATURN, CARTHAGE et MIDS[130].
Terminal Liaison 16 en Réception Multinets
En 2009, la société Hypres Inc a développé avec le support de la société Viasat, un récepteur liaison 16 digital multinets.
Ce prototype a été développé avec le soutien de l'Office of Naval Research, Washington, D.C., et du Space and Naval Warfare Systems Command, PMW-150[131].
Ce type de Terminal est indispensable à la conduite du réseau liaison 16 en temps réel par la cellule JICO, car elle permet le contrôle simultané de l'utilisation des différents canaux d'un même Network Participating Group ; Ce contrôle est nécessaire à la prise de décision de redistribution en temps réel des timeslots.
Les fréquences utilisées par la Liaison 16
Les fréquences utilisées par la Liaison 16 en 2010
Les terminaux Liaison 16 utilisaient au début 2010, 51 fréquences dans la partie de la bande UHF allant de 960 MHz à 1215 MHz.
En fait, ils utilisent 3 "sous-bandes" :
- 969 - 1008 MHz,
- 1053 - 1065 MHz, et
- 1113 - 1206 MHz
avec 3 MHz d'intervalles en TDMA[132].
Les fréquences utilisées par la Liaison 16 après 2010
La bande de fréquences UHF utilisée par la liaison 16 est partagée
- dans le domaine militaire, avec l'IFF (ou Radar secondaire) et par le TACAN
- dans le domaine aéronautique civil, avec les stations sol DME[acro 37] qui sont appariées à celles des VOR[acro 38] et des ILS[acro 39]
Des travaux de redistribution des fréquences vont limiter le nombres de fréquences utilisées[133]. Cette redistribution pourrait entraîner jusqu'à l'abandon des 14 des 51 fréquences utilisées par la Liaison 16[134]. Ces fréquences sont situées entre 960 et 1030 MHz[135]
Le MIDS JTRS intégre cette évolution[trad 11] ; une mise à jour des terminaux MIDS est en développement[trad 12],[136].
Aux États-Unis, le DoD[acro 40] s'est engagé à ce que tous les terminaux MIDS soient mis à niveau au plus tard en 2020[137].
Les terminaux JTDIS ne sont pas concernés par l'accord passé entre le DoD et le DoT[acro 41].
Le Time Slot Duty Factor
Les travaux de partage des fréquences s'effectuent en parallèle avec ceux préparant l'évolution des accords interministériels définissant le nombre d'impulsions émises dans l'air et appelé Time Slot Duty Factor. Le TSDF peut référer au nombre d'impulsions émises par une seule plate-forme ou dans une zone géographique[135].
Les systèmes antennaires des terminaux Liaison 16
 Antenne Liaison 16 AS-4127A destinée aux bâtiments de surface (L'anneau antennaire est vu du dessus ; Le mât étant prévu au centre de l'anneau) en chambre anéchoïde
Antenne Liaison 16 AS-4127A destinée aux bâtiments de surface (L'anneau antennaire est vu du dessus ; Le mât étant prévu au centre de l'anneau) en chambre anéchoïdeLa majorité des plates-formes disposent de deux antennes Liaison 16.
- Les aéronefs disposent
- d'une antenne supérieure qui, en particulier assure aux avions de chasse, la connectivité avec les AWACS ou les E-2 Hawkeye, qui par définition, orbitent à un niveau de vol supérieur au leur.
- d'une antenne inférieure qui leur assure la connectivité avec le sol ou les navires de guerre.
- Les navires disposent d'une antenne principale, émettrice et réceptrice, située en tête de mât, et en général d'une antenne secondaire uniquement dédiée à la réception. La hauteur de l'antenne secondaire, par rapport au niveau de l'eau, se situe au 2/3 de la hauteur de l'antenne principale afin que les deux antennes ne subissent pas en même temps le "zéro" signal, obtenu par la réception simultanée du même signal, en opposition de phase ou en déphasage, l'un en direct, l'autre après réverbération sur la surface de l'eau. Les frégates AEGIS de l'US NAVY possèdent une antenne en émission et deux antennes, en réception seule[138].
Les caractéristiques de l'antenne AS-4127A sont[139] :
- Bandes de fréquences 960 MHz à 1215 MHz
- Puissance de transmission 1200 Watt en pic et 140 Watt en moyenne
- Gain typique 3,0 dB
- Omnidirectionnelle
- avec ou sans TACAN
- Poids 45 kg
Des antennes multifonctions comme l'AT 4125 de AEROMARITIME, ont été adaptées pour la mise en œuvre de la liaison 16 à bord des sous-marins[140]
La mise en place de filtres Notch ou Filtre coupe-bande, entre le terminal et l'aérien émetteur/récepteur, permet d'éviter les interférences avec les systèmes d'identification et de navigation, en réduisant la diffusion d'énergie dans des bandes de fréquences étroites bien définies[141], en particulier celles utilisées par l'IFF. Voir à titre d'exemple le filtre Model Number L5992 (LINK-16) MIDS/ARC-210 Dual Bandpass Filter de Delta Microwave[142].
La Cryptographie
 KOI-18
KOI-18Le terminal MIDS contient un élément de cryptographie. L'élément de cryptographie intégré dans les terminaux de l'US navy est le KGV-8[143]

Le fonctionnement du Terminal MIDS nécessite l'entrée de clés dans cet élément de cryptographie.
Les clés sont entrées par un KOI-18 (en) dans le CYZ-10 (en).
Le KOI-18 permet de lire les clés sur un ruban perforé (paper tape) à 8 pistes (8 trou par colonne, soit un octet).
 CYZ-10
CYZ-10Le CYZ-10 est un ordinateur personnel portable, supportant des logiciels applicatifs développés spécifiquement pour le chargement des clés cryptographiques.
Les clés de cryptographie sont un élément déterminant dans la loi de sauts de fréquences.
Un programme de modernisation des éléments de cryptographie[trad 13],[144] a été financé dans les budgets 2010 et 2011 du département de la défense US[145].
Cette nouvelle cryptographie programmable du terminal MIDS-LVT (appelée "LINK 16 Common Crypto Module" (CCM)[146]) s'inscrit parmi d'autres évolutions à l’étude[147], pour intégrer
- le haut débit (1Mb/s)[trad 14]
- la gestion dynamique du réseau[trad 15]
- le multi-réseaux en opérations concurrentes[trad 16]et
- la fonction de redistribution des fréquences[trad 17] dans le cadre de la gestion du spectre fréquentiel avec l’aviation civile[148].
Description du mode de fonctionnement
 Principe du TDMA
Principe du TDMALa Liaison 16 est basée sur le principe du TDMA[acro 42]. Elle est sécurisée par des clefs de cryptage et résistante aux contre-mesures grâce à ses 77.000 sauts de fréquence par seconde (mise en œuvre de l'évasion de fréquences ou Frequency-hopping spread spectrum). Les données sont transmises par onde radio en bande UHF.
La Liaison 16 est souvent qualifiée de réseau, car elle permet la connexion simultanée de plusieurs unités militaires, chacune d'entre-elles est appelée participant au réseau ou "JU" (JTIDS Unit, ce nom, bien que devenu impropre, a été conservé) et dans le cadre du réseau logique unique "IU" (Interface Unit).
Les "TimeSlots", la "FRAME" et l'"Époque"
La Liaison 16 découpe le temps en subdivisions appelées TimeSlot (TimeSlot ou Accès multiple à répartition dans le temps). Il y a 128 TimeSlots par seconde. Il y a donc 1536 TimeSlots par 12 secondes que l'on appelle FRAME. Dans une FRAME (12"), les TimeSlots sont répartis en trois ensembles (Sets) de 512 TimeSlots chacun : les sets "A", "B" et "C".
Chaque TimeSlot est affecté à un NPG (voir plus bas). Dans le temps, la répartition des TimeSlots est entrelacée :
- Les TimeSlots se succèdent en passant d'un Set à l'autre comme suit : A1,B1,C1... ...A512, B512, C512.
- Si un total de 512 TimeSlots par 12 secondes, est affecté à un seul NPG, Les 512 TimeSlots seront affectés à un seul set, par exemple le set A ; ainsi les TimeSlots de ce NPG ne seront jamais consécutifs.
Chaque TimeSlot permet (généralement) à un seul participant du réseau Liaison 16 d'envoyer des données sur le réseau, les autres participants au réseau Liaison 16 reçoivent ces données pendant la durée de ce 'TimeSlot'.
Les données de série-J, sont formatées dans des messages prédéfinis dans le STANAG 5516 (appelés messages J). Chaque JU possède une table d'allocation qui définit l'ensemble des TimeSlots d'émission et de réception qui lui sont alloués. Cette table est récurrente et est définie pour une période appelée Époque de 12 min 48 s.
Les "Nets"
Les 1536 TimeSlots par 12 secondes, du réseau Liaison 16, peuvent être empilés sur 127 nets.
Un Numéro de Net différent peut être attribué à chaque groupe de participation (NPG). Cela veut dire que les fréquences attribuées à chacun des TimeSlots de ce NPG seront attribuées en fonction de lois de sauts de fréquences liées au Numéro de Net.
Lors de la conception du réseau, un fonctionnement en multinet peut être nécessaire pour optimiser l'utilisation des TimeSlots. Dans ce cas, certains groupes de participation fonctionneront en parallèles ; par exemple, les Plates-formes C2 travailleront sur le groupe de participation EW, alors que les plates-formes Non-C2 travailleront sur le groupe de participation Non-C2 to Non-C2 appelé aussi "Fighter-to-Fighter".
Les "Network Participating Groups" (NPG)
Les "Network Participating Groups" (NPG) - Généralités
Le réseau est organisé par fonctions, nommées groupe de participation. Chaque JU peut être abonnée à un ou plusieurs groupes de participation. Les plus utilisés sont :
- PPLI (Precise Participant Location and Identification) (groupes de participation 5 et 6),
- SURVEILLANCE : partage des détections avec les centres de commandement (groupe de participation 7),
- CONTROL : Contrôle et assignation de mission (groupe de participation 9)
- Electronic Warfare & Coordination (groupe de participation 10).
- Fighter-to-Fighter : communication intra patrouille (groupe de participation 19).
Les "Network Participating Groups" (NPG) empilés
 Plate-forme Non-C2 : F-16 Hollandais
Plate-forme Non-C2 : F-16 HollandaisCertains groupes de participations peuvent être empilés[trad 18]. Cela permet à des groupes d'unités indépendantes de travailler de manière simultanée sur un plan de saut de fréquences différent; ainsi lorsque plusieurs patrouilles d'avion de chasse (unités Non-C2) travaillent sur un même théâtre, plusieurs unités appartenant à des groupes différents peuvent émettre simultanément.
Le nombre de Nets disponibles dans un réseau Liaison 16 est de 127. Du Net "0" au Net "126" ; la valeur par défaut du Net Control des plates-formes Non-C2 est positionnée à "127". Lors de la prise de contrôle par une plate-forme "C2[acro 4]", le système de mission du Non-C2 positionne la valeur du Net CONTROL du terminal MIDS, sur celle du Net CONTROL de la plate-forme C2.
En pratique, pour un groupe de participation donné (NPG), il est possible de mettre en œuvre jusqu'à 20 nets sans risque de brouillage.
Les principaux groupes de participations utilisés de manière empilée sont :
- PPLI-A (Precise Participant Location and Identification) (groupe de participation 5),
L'empilement de ce NPG permet d'attribuer en émission à chaque JU Non-C2 d'une même patrouille, environ 1 timeslot par seconde, afin d'effectuer un échange rapide de position au sein de cette patrouille et permettre ainsi à chaque plate-forme, une capacité de corrélation rapide entre une nouvelle détection radar et un PPLI ; cela permet d'éviter un tir fratricide lorsque des chasseurs AMI et HOSTILE sont engagés dans le même volume aérien.
- CONTROL : Contrôle et assignation de mission (groupe de participation 9)
Chaque unité C2 contrôlante possède son net de contrôle. Les unités Non-C2 changeant d'unité contrôlante, changent donc de net.
- Fighter-to-Fighter : communication intra patrouille (groupe de participation 19).
Chaque patrouille possède son propre net, en particulier, pour effectuer une fusion des plots de détection radar avant de la transmettre (sur le groupe de participation CONTROL) à l'unité contrôlante qui créera et diffusera sur le groupe de participation SURVEILLANCE, la piste correspondante.
- Deux groupes de participations VOICE (groupes de participation 12 et 13) peuvent être empilés. Ils peuvent être mis en œuvre, par exemple, pour le contrôle des unités Non-C2 en phonie (un net est affecté à chaque plate-forme C2).
Dans l'environnement radio totalement brouillé par la mise œuvre de la liaison 16 en mode "Combat" (puissance d'émission jusqu'à 1 kW et saturation des fréquences), les groupes de participation VOICE peuvent s'avérer indispensables dans les premiers jours de la Campagne de guerre. Il faut donc noter que les avions de chasse équipés de terminaux Fighter Data Link qui n'offrent pas de capacité de phonie, ne pourront pas participer pleinement à cette première phase de la Campagne de guerre. Cependant, dès que les principales forces d'opposition sont neutralisées, les groupes de participation VOICE sont abandonnés pour dégager de la bande passante au profit, en particulier, des aéronefs en soutien des forces au sol (CAS : Close Air Support)
Le débit de transmission
Le débit de la liaison dépend de la configuration utilisée, Il peut théoriquement atteindre 107,520 Kbit/s.
Amélioration de la Bande passante
 2 plates-formes Non-C2 : F-22 Raptor
2 plates-formes Non-C2 : F-22 RaptorLa volonté de gagner de la bande passante dans le réseau Liaison 16, pourrait amener certaines nations à exclure les groupes de participation CONTROL et Fighter-to-Fighter du réseau liaison 16, au profit de réseaux nationaux à très hauts débits. Lors des opérations menées par l'OTAN, les vols mixtes d'aéronefs non-C2 et appartenant à des nations différentes, au sein d'une même patrouille sont exceptionnels.
- La Suède, nation non OTAN, mais disposant depuis peu de la Liaison 16, est pionnière dans le domaine. Le Gripen Suédois ne devrait pas mettre en œuvre ces groupes de participation.
- La France pourrait suivre la voie en dotant le Rafale de capacités Fighter-to-Fighter non-L16 mais bien plus performantes en termes de débits, grâce à la mise en œuvre de radios nouvelles génération à très hauts débits.
- L'Allemagne, les nations nordiques (Norvège, Danemark, Hollande) et la Grèce pourraient en faire autant.
- Quant aux États-Unis, les études d'un réseau AIR dédié sous protocole Internet ont été validées par des expérimentations concluantes. D'autre part, le développement du MADL (Multi-function Advanced Tactical Data Link) pour les F-22 Raptor et F-35 Joint Strike Fighter[149], répond à un besoin de discrétion. Les études de définition de la messagerie ont fait l'objet d'un appel d'offre durant l'été 2009[150] ; l'intérêt des forces de l'OTAN est que cette nouvelle liaison appartienne à la famille de la série-J et que ces avions soient équipés parallèlement au MADL d'un terminal MIDS. L'opération en Libye en 2011, a mis en évidence ce besoin d'interconnexion entre la Liaison 16 et le MADL[151]. Cela pourrait être réalisé par le déploiement du BACN (en)[152], la pertinence de ce programme est cependant très controversée au DoD, cela illustre l'opposition entre les tenants des la guerre en réseaux impliquant la présence des plates-formes C2 dans la boucle de décision, et ceux qui prônent les actions indépendantes des avions Non-C2.
L'US Navy, et plus particulièrement le SPAWAR de San Diego[153], développe le protocole "Stochastic Unified Multiple Access[154]" (SHUMA) qui permet au réseau Liaison 16 d'adapter l'utilisation des TimeSlots selon la présence réelle des IU (Interface Units) dans le réseau. D'autres études sont en cours, en particulier le "Link-16 Enhanced Throughput (ET) capability" qui fournit la capacité de transmettre plus d'information dans un TimeSlot sans modifier la structure radiofréquence du signal[155]. Cependant, la poursuite de cette étude a été abandonnée dans le budget de 2011[156]
L'US Navy travaille également sur la gestion Dynamique du réseau ou DNM[157].
DNM augmente l'efficacité du réseau Liaison 16, son débit et fournit au combattant, une plus grande flexibilité d'utilisation du Lien 16[trad 19].
DNM facilite l'entrée/sortie automatisée des plates-formes[trad 20] DNM fournit une capacité en temps réel de régler l'allocation des timeSlots pour s'adapter aux évolutions du réseau dans le théâtre d'opération[trad 21]
DNM réduit les "sur-abonnements" au réseau et permet ainsi
- des opérations sur un réseau totalement ad hoc et dynamiques sur le Lien 16.
- des mises à jour et des taux de mises à jour variables et
- un réseau étendu grâce aux opérations en sous-réseaux[trad 22]
DNM fournit également un soutien :
- à l'interconnexion des armes,
- au réseau de senseurs
- aux ciblages critiques en temps et
- aux frappes critiques en temps[trad 23].
DNM inclut les capacités suivantes :
- la Réallocation de TimeSlots (TSR),
- la Réallocation de TimeSlots des Groupes de Participation Combinés (CNPG),
- le développement des réseaux empilés
- le multinetting[trad 24]
Le programme DNM (Dynamic Network Management) doit se terminer fin 2015 au plus tard.
La portée radio
La portée radio est selon l'empaquetage[trad 25] de 300 ou de 500 milles nautiques.
Conception du Réseau Liaison 16
Contrairement à la Liaison 22 qui met en œuvre une gestion dynamique du réseau – la distribution du temps de parole (les TimeSlots) s’adapte au besoin du moment – la Liaison 16 exige la mise en œuvre d’une phase de conception du réseau avant sa mise en œuvre.
Cette phase appelée « Design Phase », intervient après que les besoins de chaque Commandant de domaine de lutte, ont été collectés (JFACC ; Joint Force Air Component Commander, JFMCC : Joint Force Maritime Component Commander , JFLCC : Joint Force Land Component Commander). Ce travail est généralement effectué par la Cellule du JICO : Joint Interface Control Officer. C’est dans cette phase que sont effectués les arbitrages d'affectation des TimeSlots afin de que le réseau Liaison 16 puisse répondre au mieux aux besoins de la Force le mettant en œuvre.
Le nombre de plates-formes équipées de la Liaison 16 grandissant de manière significative, le réseau Liaison 16 est aujourd’hui souvent saturé. Le besoin d’une gestion dynamique du réseau Liaison 16 est donc devenu prioritaire. De même, une gestion optimisée des TimeSlots est essentielle ; ainsi en temps de paix, l’utilisation d’un empaquetage double (Packing 2) a pris l’avantage sur l’empaquetage standard (Packing STD) car il double le nombre de mots échangés ; en temps de guerre l'empaquetage quadruple (Packing 4) permet de quadrupler le nombre de mots échangés. Cela s’effectue au prix d'une dégradation de la sécurité de transmission qui s’avère acceptable aujourd’hui, en raison de la faiblesse technologique des forces opposantes.
Une autre voie s'ouvrira avec l'entrée en service des terminaux MIDS JTRS (Joint Tactical Radio System) ; l'utilisation combinée de la Liaison 16 et de la Liaison 22 sera alors possible. La Liaison 22 serait utilisée prioritairement pour la diffusion des pistes à faible taux de mise à jour (Pistes Surface Maritime, Pistes Surface Terrestre, Points de Référence). Lorsqu'une de ces pistes deviendrait une cible, elle pourrait alors également être diffusée en Liaison 16. Ainsi la Liaison 16 et la Liaison 22 (et plus tard la "liaison J-over-IP") doivent être perçues comme des composantes d'un réseau logique unique échangeant des données de série-J. Il manque à ce réseau logique le maillon permettant les échanges de données de série-J entre les aéronefs et les forces au sol pour l'Appui aérien rapproché ou Close air support[158]. Ce maillon est pallié aujourd'hui par la mise en œuvre de l'IDM : Improved Data Modem[159]. En attendant son remplacement par une liaison de données de série-J, qui est un défi devant être relevé dans la décennie 2010, l'US Air Force à lancé en 2009 le programme TACP-M[acro 43] qui effectue automatiquement les traduction du format VMF[acro 44], par exemple, en données de série-J[160].
Les Interface Units, participant au Réseau Liaison 16
Il faut différencier :
- Les "Stations", c'est-à-dire les plates-formes portant un terminal MIDS ou JTIDS
- Les "Interface Units" qui peuvent être :
- Une "Station",
- Une unité participant à une Liaison de Données Tactiques (liaison 11, liaison 22, Joint Range Extension) qui est relayée sur la Liaison 16 par le "Dataforwarder[3]".
Sur l'aspect fonctionnel et opérationnel, il n'y a aucune différence de traitement sur les deux types de participants. Chacun peut recevoir et transmettre :
- Des ordres,
- Les états plate-forme,
- Les états des armes,
- Les états d'engagement.
Les Interfaces Units peuvent être actives ou passives
Les Interfaces Units en Exercice
Les Interfaces Units se déclarent en exercice, si elles participent à un exercice.
L'état "Exercice" d'une IU :
- est transmis dans le message PPLI de l'unité concernée, l'état "Exercise" du OwnShip est mis en évidence sur les écrans tactiques par la présence, par exemple, d'un X orange derrière le symbole du OwnShip,
- est mis en évidence sur l'écran tactique des autres IUs par un attribut qui peut être, par exemple, un X de couleur orange derrière le symbole de l'IU.
Sur les écrans tactiques d'une IU en exercice, les pistes dont l'identité est en "Exercice" sont présentées sur l'écran tactique, avec l'identité Exercice échangée sur l'interface (L'état "Exercice" est mis en évidence).
Sur les écrans tactiques d'une IU qui ne participe pas à l'exercice, les pistes dont l'identité est en "Exercice" sont présentées sur l'écran tactique en tant que piste AMI GENERAL.
Dès qu'une piste HOSTILE apparaît sur le réseau, ou lors de la réception du message "Exercise Status Change", l'état de de la plate-forme quitte automatiquement l'état Exercice. Cela se traduit sur les écrans tactiques par :
- Le passage automatique de toutes les pistes et IU en Exercice, à l'Identité AMI GENERAL,
- la suppression automatique de tous les états d'engagements, impliquant des pistes précédemment à l'état "Exercice".
Les Interfaces Units Actives
Ce sont les IUs qui transmettent au minimum leur position sur l'interface. Une IU active (plate-forme C2) peut assurer opérationnellement le contrôle d'une IU passive (plate-forme Non-C2).
Les Interfaces Units Passives
Les Interfaces Units peuvent n'avoir jamais émis de messages sur l'interface. C'est la raison pour laquelle, il a été prévu de permettre à un terminal MIDS de se synchroniser passivement sur le réseau Liaison 16.
Les Interfaces Units passives peuvent cependant être destinataires d'ordres adressés, dans ce cas, l'attitude de la plate-forme permet de s'assurer que l'ordre a bien été reçu.
Si une IU passive est détectée par une Interface Unit (plate-forme C2) active, celle-ci :
- affectera manuellement à la piste correspondant à l'IU passive, le Track Number qui lui aura été attribué dans le message OPTASK Link, (Les opérateurs peuvent attribuer manuellement, n'importe lequel des TNs hors de la plage des TNs affectée à leur plate-forme),
- diffusera la piste sur l'interface,
- cessera la diffusion si l'IU devient active.
Les IUs passives sont, à titre d'exemple,:
- Les avions ravitailleurs qui pour des raisons de sécurité n'émettent pas durant les ravitaillements,
- Les avions en cours de ravitaillement (pour les mêmes raisons),
- Les avions en approche de zone de frappe, par souci de discrétion[161],
- les sous-marins à l' immersion périscopique ou en immersion de sécurité et à l'écoute des informations forwardées depuis la liaison 16, en liaison 11 ou en liaison 22.
Configurations d'une plate-forme C2, équipée Liaison 16
 Écran Tactique à bord d'un E2-C - Les pistes sont sélectionnées ("Hookées") grâce à un stylo optique
Écran Tactique à bord d'un E2-C - Les pistes sont sélectionnées ("Hookées") grâce à un stylo optique
En Bref, chaque système de mission d'une plate-forme C2 qui met en œuvre la liaison 16, possède deux états de la fonction "Liaison de Données Tactiques" (LDT), qui définissent le contenu des données émises vers le terminal MIDS:- LDT "NORMAL", dans cet état, toutes les données éligibles pour la transmission sont transmises au terminal MIDS et mises à jour en permanence.
- LDT "SILENCE", dans cet état, seules les données sélectionnées par l'opérateur sont transmises ponctuellement au terminal MIDS. Une fois émises ces données sont automatiquement dé-sélectionnées pour ne pas être réémises lors de l'action opérateur suivante.
Les configurations standards d'une plate-formes équipée liaison 16 (JTIDS Unit) sont :
- MIDS en transmission de données "AUTORISÉ" et Système de mission en LDT "NORMAL",
- MIDS en transmission de données "RADIO SILENCE" et Système de mission en LDT "SILENCE".
- Dans ce cas aucune donnée n'est émise
Il existe une autre configuration utilisée régulièrement
- MIDS en transmission de données "INTERDIT" et Système de mission en LDT "NORMAL".
Dans cette configuration, sur action opérateur, le MIDS du sous-marin à l' immersion périscopique, ou de l'avion de patrouille maritime remontant à une altitude élevée, est positionné ponctuellement (12 secondes ou 1 FRAME) en transmission de données "AUTORISÉ", et transmettent ainsi toute leur situation tactique (SITREP[acro 45]).
Enfin, la configuration
- MIDS en transmission de données "AUTORISÉ" et Système de mission en LDT "SILENCE".
- Dans ce cas le terminal continue de transmettre l'identité et la position de la JU,
- Généralement, par souci d'économie de timeslots, l'émission s'effectuera en contention
permet à l'opérateur d'une plate-forme C2 donnée, d'émettre ponctuellement une information ou un ordre indispensable, sans pour autant participer en permanence à l'élaboration de la situation tactique.
Les fonctions de la liaison 16
Elles sont partagées par toutes les liaisons de données tactiques mettant en œuvre des données de série J. Le choix d'utiliser une liaison de données plutôt qu'une autre est guidé par les contraintes suivantes :
- Le besoin de taux de mise à jour des données. La Liaison 16 répond à un besoin de rafraichissement rapide. C'est lors de la phase de conception du réseau Liaison 16, qu'il est pris en compte la nécessité de limiter le délai entre l'envoi d'un ordre et son acceptation sur la plate-forme destinataire à un maximum d'une seconde.
- Les distances de connectivité. La Liaison 16 répond à un besoin de connectivité limitée à la portée optique
- La protection des données. La Liaison 16 offre le niveau le plus haut de protection
Il existe un lien fort entre les Groupes de Participation de la liaison 16, et les fonctions des trois Liaisons de Données Tactiques utilisant les données de série-J. Ce lien spécifique à la Liaison 16, ne se retrouve pas dans les autres Liaisons ; les Groupes de Participation sont spécifiques à la liaison 16.
Les principales fonctions des liaisons de Données Tactiques de série-J sont listées ci-dessous :
L'identification
L'identification est supportée par les Groupes de Participation PPLI-A et PPLI-B. La présence d'une plate-forme sur l'un de ces NPG (le PPLI-B) suffit à son identification AMI.
- L'identification d'une plate-forme C2[acro 4] est précisée, dans le message PPLI, par la transmission de son indicatif phonie, de sa fréquence de contrôle ou du Numéro de Net VOICE attribué à cette fonction, de son Numéro de Net CONTROL
- L'identification d'une plate-forme Non-C2 est précisée, dans le message PPLI, par la transmission de son indicatif phonie, de la fréquence de contrôle ou du N° de Net VOICE, du Numéro de Net CONTROL, sur lesquels elle est positionnée.
Cette fonction est la fonction essentielle de la Liaison 16. L'identification AMI donnée par la Liaison 16 est la meilleure garantie contre les tirs fratricides.
L'identification est complétée par l'état de la plate-forme. Ainsi, sur le Groupe de Participation, PPLI-B,
- chaque plate-forme d'Environnement AIR transmet des informations générales sur le déroulement de sa mission, par exemple, le temps restant à passer sur zone, la quantité de carburant disponible, le nombre d'armes disponibles immédiatement (Hot Weapons) et le nombre d'armes se trouvant en soute (Cold Weapons) etc.
Cette information permet aux Commandants de lutte de vérifier, en temps réel, la capacité d'une plate-forme, C2 ou Non-C2, a réaliser une nouvelle mission, sans devoir intervenir en phonie et ainsi, en évitant de perturber les opérateurs menant des actions tactiques. Il est essentiel que ces informations soient mises à jour automatiquement.
En cas de nécessité, une plate-forme AIR peut de plus, transmettre les états d'urgence[trad 26] comme l'éjection du pilote[trad 27], ou l'amerrissage[trad 28].
- chaque plate-forme d'environnement SURFACE transmet les mêmes informations générales avec de plus, pour les plates-formes équipées de pont d'envol, la couleur de celui-ci (Rouge, Orange, Vert)
En cas de nécessité, une plate-forme SURFACE peut aussi, transmettre un état d'urgence[trad 26].
La navigation est essentiellement supportée par le Groupe de Participation, PPLI-B
La liaison 16 entretient pour chaque plate-forme, une navigation relative et une navigation absolue. Les navigations, relative et absolue, que la liaison 16 offre sont inégalées sur un théâtre d'opération dont l'environnement est fortement brouillé.
Le référentiel de la navigation liaison 16 est le WGS 84 (World Geodetic System 1984 : Système géodésique mondial, révision de 1984)
Dans le réseau Liaison 16, les distances sont exprimées en data mile[162] (0,987 du mile nautique ou mile marin)
La surveillance
 Ecran de surveillance d'un destroyer AEGIS
Ecran de surveillance d'un destroyer AEGISLa surveillance est la fonction première des plates-formes C2[acro 4].
Équipées de senseurs, elles élaborent, à partir de données brutes (les plots radar, les détections reçues des plates-formes Non-C2, par exemple), des pistes dont les symboles représentent sur les écrans, les informations cinématiques et de localisation dans l'espace, des mobiles détectés.
Dans le théâtre d'opération très connecté des années 2010, il est indispensable que ces informations soient élaborées au sein des plates-formes C2, dans un format apte à être immédiatement transmis vers les autres éléments de la force.
Il est également nécessaire qu'en amont, les capteurs fournissent des informations, dans un format de données, immédiatement utilisable localement et à distance par l'échange de données tactiques ; c'est pourquoi les données de série-J décrites à l'identique dans les stanag 5516 et 5522, sont généralement le format de données en sortie des capteurs, imposé par les architectes des systèmes de combat et de mission. Cependant, ces capteurs ne fournissent que des données brutes ; l'élaboration des données consolidées que sont les pistes, doit rester de la responsabilité exclusive du système de la plate-forme C2 ; cela est indispensable à la mise en œuvre d'une capacité de poursuite multisenseurs efficace.
A bord des plates-formes C2, sont distinguées :
- les données techniques dont l'exploitation est à usage exclusivement interne
- les données tactiques dont l'exploitation est réalisée en interne et sur les autres plates-formes.
Seules les informations échangées, par l'intermédiaire des liaisons de données, ont droit au qualificatif de tactiques.
Le format d'échange retenu par les forces de l'OTAN et françaises, est celui des données de série-J.
But de la surveillance

L'échange de données consolidées sur le Groupe de participation surveillance, permet aux plates-formes C2 d'élaborer une image tactique unique et partagée par tous les participants au réseau. Les données tactiques consolidées sont :
- Les Pistes ("Temps réel" (TR) et "non temps réel" (NTR) en particulier les pistes de catégorie "SURFACE", issues de l'AIS[acro 47])
- Les points, lignes, surfaces et volumes de référence qui permettent en particulier de définir l'espace aérien, les chenaux maritimes et les rails de navigation maritime en particulier ceux appartenant aux dispositifs de séparation du trafic comme le rail d'Ouessant
- Les points d'urgence
- Les fixes (positions en latitude, longitude et éventuellement altitude)
- Les relèvements (latitude, longitude et azimuth)
Le Groupe de participation surveillancepermet également aux plates-formes C2, d'échanger des messages dont le but est de clarifier l'image tactique, en supprimant :- les doubles désignation (Un objet du monde réel faisant l'objet de deux pistes)
- les conflits de TN (le même numéro de piste (TN) désignant des objets différents)
- les conflits d'environnement (par exemple, un objet est évalué par une unité comme appartenant à l'environnement Surface maritime et il est évalué par une autre unité comme appartenant à un autre environnement - Air par exemple).
- les conflits d'identité (écart d'identité)
- les conflits d'IFF (écart d'IFF)
Le Groupe de Participation, surveillance permet aux plates-formes C2 de transmettre des liens entre deux objets de l'image tactique, par la transmission de messages d'association et de PAIRING[3]
L'association et l'appariement
L'association et l'appariement ne sont pas des fonctions propres aux liaisons de données tactiques en général, ou à la Liaison 16 en particulier. Les systèmes de mission et de combat, associent et appairent les pistes, même en l'absence de connexion au réseau afin d'éclaircir ou de préciser l'image tactique.
Une fois la plate-forme connectée à l'interface, la Liaison 16 permet la transmission de ces informations.
L'association
 Écran de surveillance du USS John S. McCain
Écran de surveillance du USS John S. McCainL'association indique que les objets concernés sont relatifs au même objet du monde réel
Par exemple,
- Un relèvement de Guerre Électronique est associé à une piste AIR, si les informations captées (par exemple les émissions d'un radar), sont issues de la piste AIR.
- Deux pistes sous-marines sont associées, si elles désignent le même sous-marin (les pistes sous-marines ne peuvent pas être corrélées).
Sur les écrans, l'association est généralement représentée, lors de la sélection d'une des pistes associées, par un trait de couleur Jaune la reliant aux autres pistes associées.
L'appariement
L'appariement se dit dans le langage commun PAIRING.
Le PAIRING précise le déroulement de la mission d'une piste AMI en décrivant son activité.
Par exemple,
- la piste d'un avion AMI retournant à sa base (RTB[acro 48]) fera l'objet d'un PAIRING avec la base devant accueillir l'aéronef.
- un avion ravitailleur AMI fera l'objet d'un PAIRING avec le point de référence de ravitaillement autour duquel il orbite.
Le message PAIRING peut être émis par une plate-forme C2 :
- pour préciser sa propre activité, par exemple RTB : je retourne à la base dont le Track Number est indiqué,
- pour préciser l'activité d'une plate-forme Non-C2 qui est sous son contrôle, par exemple RTB : l'aéronef que je contrôle retourne à la base dont le Track Number est indiqué.
Sur les écrans, l'appariement est généralement représentée, lors de la sélection d'une des pistes appariées, par un trait de couleur Bleue la reliant à la seconde piste objet de l'appariement.
Nombre d'objets tactiques échangés
La fonction surveillance de la liaison 16 permet d'échanger plusieurs milliers de d'objets tactiques.
Le concept de Guerre en réseau ou NCW impose que l'ensemble des objets soient mémorisés dans la base de données (Table des pistes) des plates-formes C2 et Non-C2.
Les systèmes de combats aux débuts du XXIe siècle permettaient de gérer généralement 2000 objets. C'est particulièrement le cas du porte-avions Charles de gaulle[163] et de l'E-2C[164]. Depuis, la capacité des systèmes en gestion du nombre de pistes a été augmentée, particulièrement pour les E-2D[165] américains et les E-3 de l'OTAN[166].
Visualisation des objets tactiques reçus
La grille de visualisation
 La projection de Mercator est cylindrique.
La projection de Mercator est cylindrique.La visualisation des objets s'effectue sur une grille orthogonale en coordonnées cartésiennes. Cette grille permet :
- techniquement, le positionnement précis des pistes issues des plots radar,
- opérationnellement, aux contrôleurs aériens d'effectuer un contrôle serré des aéronefs en indiquant des routes correctement visualisées sur leurs écrans
La grille est centrée sur le porteur et est recalée environ toutes les minutes pour un avion et toutes les dix minutes pour un navire.
Il est important de noter qu'à l'échelle d'une zone tactique, les écarts de distance entre :- une route loxodromique ou Loxodromie, représentée sur une carte marine ou aéronautique en projection de Mercator par une ligne droite et qui ne représente pas la distance la plus courte entre deux points
- et la route la plus courte, appelée route orthodromique ou orthodromie, représentée sur une carte marine ou aéronautique en projection de Mercator par une courbe,
sont négligeables.
La route d'une piste échangée sur la liaison 16 est déterminée à partir du méridien de référence de la position de cette piste (le nord à la position de la piste). La route présentée sur les écrans tactiques sera quant à elle référencée au méridien de référence du porteur. En résumé :- la route présentée sur les écrans diffère d'un porteur à l'autre et est référencée au Nord de la position du Porteur
- la route mémorisée en base de données est identique sur toutes les plates-formes et est référencée au Nord de la position de la piste
Certains systèmes présentent les objets sur une projection cartographique au détriment de la facilité d'emploi opérationnel ; à titre d'exemple, contrairement à une grille orthogonale en coordonnées cartésiennes orthonormé,- la direction du nord n'est vers le haut de l'écran qu'à la position de la plate-forme ; sinon, la direction du nord diffère un peu, en fonction de l'écart de la position de l'objet par rapport à la position du porteur. La différence est d'autant plus sensible que le porteur se trouve à une latitude élevée.
- les distances nord/sud et est/ouest sont différentes pour un même écart sur l'écran, selon le type de projection cartographique. En projection de Mercator, la distance en milles nautiques en est/ouest = nombre de minutes en longitude X Cosinus de la latitude du lieu.
- en bref, la précision des positions des cibles transmises aux armes moyenne et longue portée est fortement altérée, si elles sont déterminées à partir d'une projection cartographique au lieu d'une grille orthogonale en coordonnées cartésiennes orthonormé.
Objets visualisés - Visualisation Forcée[trad 29] et Visualisation d'urgence[trad 26]
 Visualisation Console NTDS
Visualisation Console NTDSLes opérateurs des plates-formes mettent en place des filtres de visualisation, afin de ne présenter sur les écrans que l'information désirée ; cependant, si nécessaire, tout objet peut être "poussé" sur les écrans d'une autre plate-forme ou "tiré" sur ses propres écrans.
- Les plates-formes C2 forcent la visualisation d'un objet tactique sur les autres plates-formes C2 par l'envoi d'un message "ForceTell" transmis sur la surveillance. (Les plates-formes Non-C2 n'interprètent ni ce message, ni le champ "Force Tell" inclus dans les messages pistes (J3.X) et Interface Unit (J2.X)).
- Les plates-formes C2 forcent la visualisation d'un objet tactique sur les plates-formes Non-C2 qu'elles contrôlent par un message "HIT" (High Interest Track) émis sur le groupe de participation CONTROL.
- Les opérateurs des plates-formes C2 et Non-C2 disposent d'un message système qui leur permet de forcer la visualisation et la prise en contrôle opérateur (HOOK[167]), d'un objet dont ils saisissent le Link Track Number. ("CALL TN" - "AANNN")
Sur les écrans tactiques, les pistes en "Force Tell" et en "Emergency" sont affectées d'un identifiant particulier afin que l'opérateur comprenne d'un coup d'œil pourquoi une piste appartenant à une catégorie ou une identité filtrée est présente sur son écran.
Objets visualisés - Plate-forme Non-C2 - High Interest Track
Pour permettre la visualisation immédiate de toute information "forcée" ou "appelée", la capacité de mémorisation de la table des pistes d'un avion de chasse doit être la même que celle des plates-formes C2 qui le contrôlent. En l'absence de cette capacité sur les plates-formes Non-C2, le délai de visualisation de la piste pourrait prendre jusqu'à 12 secondes pour une piste AIR ou SURFACE marquée HIT ; ce délai est inacceptable en situation de combat.
Le HIT permet à une plate-forme C2 de pousser l'information ponctuellement utile dans le cockpit d'une plate-forme Non-C2.
Opérationnellement, avant l'envoi d'un ordre d'engagement vers une plate-forme Non-C2 qu'elle contrôle, la plate-forme C2 positionnera la piste de la cible en "High Interest Track". Elle s'assure ainsi que la cible est visualisée sur l'écran du destinataire et que rien ne s'oppose à ce que l'ordre soit exécuté sans délai.
Objets visualisés - Choix de visualisation
 Symbologie sur écran d'un F-18
Symbologie sur écran d'un F-18
Au début 2010, grâce aux puissances de calcul et aux capacités de mémorisation, la technologie n'impose plus (au donneur d'ordre ou à l'industriel) d'effectuer des choix sur le traitement à priori des informations devant être visualisées par l'utilisateur opérationnel.L'expérience à montré que certaines informations considérées inutiles à priori, devenaient indispensables dans certains contextes. À titre d'exemple, les pistes sous-marines ne sont pas utiles à la conduite des missions des avions de chasse. En exercice simulé, il a été démontré qu'en cas d'éjection d'un pilote au-dessus de la mer, la visualisation du symbole d'un sous-marin AMI sur l'écran d'un avion de chasse, devenait, à cet instant précis, l'information indispensable pour permettre au pilote de s'éjecter au plus près d'un sous-marin AMI présent sur zone, qui pourra ainsi rapidement le récupérer.
Les conséquences qui ont été tirées de ces simulations, se résument ainsi :
Sur une plate-forme donnée,
- Aucune information ne doit être à priori rejetée ; toutes les informations circulant sur le réseau doivent être mémorisées en table des pistes.
- Il est de la responsabilité unique des opérateurs de décider quelles informations doivent être présentées en permanence sur leurs écrans (mise en œuvre des filtres en visualisation).
- La symbologie associée aux objets considérés de moindre intérêt, pour la plate-forme considérée et donc pratiquement jamais visualisés, peut être un symbole générique dont l'utilité est de pouvoir présenter une position, en économisant le coût de développement de tous les symboles NTDS ou des APP-6A/MIL-STD-2525A-B.
Objets visualisés - Symbologie NTDS
Exemples de Symbologie filaire (NTDS)[168] Environnement Ami Hostile Inconnu Neutre Surface Mer 



Air (Avion)




Air (Hélicoptère)



Sous-marin 


Sous-marin (тоrpille)


Surface Sol 


Les pistes
 Exemple de visualisation d'une Piste Surface (Terrestre) HOSTILE
Exemple de visualisation d'une Piste Surface (Terrestre) HOSTILELa surveillance permet aux unités de Commandement et de Contrôle (C2) d'élaborer une image tactique. Cette fonction leur permet d'échanger
- les messages de transmission des pistes (informations élaborées à partir de leurs senseurs) et
- les messages de gestion afin de régler tout conflit d'environnement :
- Espace,
- Air,
- Surface Terrestre,
- Surface Maritime,
- Sous-Marin
- d'identification :
- Hostile,
- Suspect,
- Neutre,
- Présumé Ami,
- Ami
- de type de plate-forme (lié à l'environnement)
- Porte-avion
- AEW
- ...
- d'activité plate-forme
- de participation à un exercice
et de permettre à une unité donnée, de compléter les informations transmises par une autre.
Une piste échangée en liaison 16 est :
- soit, temps réel, sa position en latitude, longitude, mesurée par un senseur, a été extrapolée au moment de son émission
- soit, non temps réel, à sa position en latitude, longitude, est associée une heure d'observation (l'âge maximum de l'observation est de 23 heures, 59 minutes)
La création des pistes
Seules les unités C2 peuvent créer des pistes.
Une piste s'appelle
- "LOCAL" dans le système qui l'a créé.
- "REMOTE" dans les systèmes qui l'auront reçue
- Les pistes de catégorie air ou surface, sont créées à partir de plots issus des radars primaires ou de l'IFF (Identification Friend or Foe) appelé aussi Radar secondaire. De la fusion de plots, issus de plusieurs radars, le système de chaque plate-forme ne crée qu'une seule piste LOCAL (i.e. Les senseurs ne doivent pas créer de pistes)
- Une piste de catégorie air ou surface est unique. Cependant, elle peut être LOCAL sur plusieurs plates-formes, pour cela, elle aura dû faire l'objet d'une ou plusieurs corrélations.
- Une piste LOCAL reçue sur la Liaison 16 (La plate-forme ne possède pas la responsabilité de report sur l'interface Liaison 16), est toujours considérée comme étant LOCAL, mais est appelée Common LOCAL Track.
 Exemple de Situation AIS : Manche Est
Exemple de Situation AIS : Manche Est- Les pistes de catégories surface (maritime) peuvent être également créées à partir des informations fournies par le Système d'identification automatique appelé communément AIS (Automatic Identification System) ; dans ce dernier cas, l'AIS est considéré (du point de vue militaire) comme un senseur qui élabore des données brutes non-temps réel (i.e. Position, route, vitesse et heure d'observation), et dont les informations d'identification doivent être consolidées par d'autres moyens[169]. Vue de la plate-forme la diffusant sur le réseau liaison 16, une piste AIS est donc une piste LOCAL Non Temps Réel. Les plates-formes de surveillance maritimes, utilisent les messages Free-Text pour diffuser en liaison 16, les informations recueillies par l'AIS. Le format des données AIS diffusées en Free-Text, n'était pas standardisé en 2010. Dans le cadre de l'accélération de son programme FORCE NET, l'US Navy considère l'AIS comme un moyen de renseignement à faible coût. Elle considère qu'avec l'AIS, les navires auront une capacité de perception des navires de commerce deux fois supérieure sur la COP[170],[acro 49]
- Les pistes de catégorie sous-marines sont créées à partir
Les avions Non-C2 (fighters, Bombers...) en tant que senseur déporté du C2 qui les contrôle, n'élaborent donc que des plots qui sont redescendus vers le C2 sous forme de messages "Target Sorting". Sur réception de ce message, l'unité C2 contrôlante crée et dissémine la piste sur le Groupe de Participation SURVEILLANCE. Les Non-C2 peuvent de la même manière transmettre des points (FIX) et des relèvements (LOB : Line Of Bearing) EW sur le NPG EW. Ce sont uniquement des données brutes (PARAMETRIC).
Les informations de SURVEILLANCE qu'une plate-forme C2 est amené à diffuser, sont dépendantes des capteurs des plates-formes Non-C2 qu'elle contrôle. Les caractéristiques des différents capteurs embarqués sont évolutives en fonction du déploiement des nouveaux standards d'avions de chasse. Le plan d'implémentation des messages de SURVEILLANCE d'une plate-forme C2 ne peut donc subir de limitation, tant en émission qu'en réception. En particulier, une plate-forme C2 doit posséder la capacité de diffuser toutes les informations de guerre électronique, descendues par les plates-formes Non-C2 travaillant sous son contrôle.
La remonté de données piste directement par un C2 vers un Non-C2 qu'il contrôle, au travers du Network Participating Group Control (Uplink), (pratique héritée de la Liaison 4-A), était utilisée par des armées n'ayant pas atteint un niveau opérationnel suffisant pour travailler pleinement dans une force appliquant les concepts d'emplois déduits du Network Centric Warfare. Cette pratique entraînait une confusion résultant de la réception de la même information piste par deux canaux différents (NPG Surveillance et Control). Elle n'est plus permise en raison de la restriction du nombre de TimeSlots affectés au "Control Uplink", imposée par la saturation du réseau.Les pistes en "Exercice"
 Exemple de visualisation d'une Piste Sous-marine Exercice SUSPECT ou JOKER
Exemple de visualisation d'une Piste Sous-marine Exercice SUSPECT ou JOKERA des fins d'entraînement, des plates-formes AMI (Air, Surface, Sub-surface) peuvent participer à un exercice. Ces pistes font l'objet d'une visualisation particulière ; par exemple, le fond du symbole est un X de couleur rouge.
Toutes les identités peuvent être affectées de l'attribut "Exercice"
- une piste "HOSTILE EXERCICE" est appelée FAKER,
- une piste "SUSPECT EXERCICE" est appelée JOKER[172].
Sur les systèmes, toutes les pistes en "Exercice" passent automatiquement AMI, dès l'apparition sur le réseau d'une piste Hostile (non-exercice), ou lors de la fin de l'exercice en particulier lors de la réception du message "Exercice Status Change".
Les points d'urgence
Les points d'urgence[trad 26] sont essentiellement :
- un homme à la mer[trad 30],
- l'amerrissage d'urgence[trad 28] d'un aéronef,
- l'éjection du pilote[trad 31] d'un avion. Les plates-formes C2 possèdent la capacité de créer automatiquement un point d'urgence "BailOut", à la position de l'avion, lorsqu'est reçue pour la première fois l'information d'urgence "BailOut", dans le message PPLI. Un message d'association permet de connaître le lien entre le point d'urgence et l'aéronef concerné. Cette information est essentielle pour lancer rapidement la mission CSAR[acro 50] qui s'impose.
- un navire en détresse[trad 32]
Les points de références
 Exemple de visualisation d'un pont d'identé NEUTRE
Exemple de visualisation d'un pont d'identé NEUTRELa surveillance permet également d'échanger les messages décrivant l'environnement du théâtre (comme les Points de référence : Couloirs aériens, routes maritimes, les dangers : Champs de mines etc…).
Les points fixes et les relèvements
La surveillance permet aussi la diffusion des points fixes et les relèvements élaborés par les senseurs de Guerre Électronique après qu'ils ont été consolidés (EW Product)
Enfin, la Surveillance prend en compte la lutte anti-sous-marine. Elle diffuse les points fixes et les relèvements "ASW" élaborés par les sonars et les FLIR[acro 51]. Le tempo de la lutte anti-sous-marine ne demande cependant pas un taux de mise à jour aussi élevé que celui qui est offert par la Liaison 16.
Échange des pistes au sein du réseau multiliaisons de données de série-J
La fonction surveillance est commune aux trois liaisons de données de la série-J, fonctionnant comme un seul réseau "logique" unique.
Dans le cadre du réseau logique unique idéal, la fonction de dataforwarder n'existe pas ; tous les participants sont alors abonnés aux trois liaisons. La principale difficulté empêchant la mise en œuvre de ce réseau logique idéal, réside dans les difficultés (techniques et financières) à intégrer les trois liaisons dans certaines plates-formes. C'est pourquoi de nombreuses études amont travaillent sur le réseau logique unique "Over-IP" ; dans ce contexte, l'utilisateur accède à l'information qui l'intéresse sans avoir à se soucier du chemin (de la Liaison de Données Tactiques) utilisée à cette fin.
La Corrélation sur une plate-forme (Piste Locale / Piste Reçue)
 Console SENIT 4 à bord de la frégate de la Marine Nationale La Motte-Picquet. Le SENIT 4 met en œuvre uniquement la Liaison 11.
Console SENIT 4 à bord de la frégate de la Marine Nationale La Motte-Picquet. Le SENIT 4 met en œuvre uniquement la Liaison 11.La corrélation est le processus, appliqué sur chaque plate-forme C2, par lequel les données d'une piste issue des mesures de capteur(s) et celles d'une autre piste reçue sur la liaison, sont fusionnées en une seule piste "locale" contenant des données "externes" (Remote). L'objectif de la corrélation est de garder sur la SURVEILLANCE, une image tactique commune à toutes les plates-formes, à jour en temps réel.
Le processus de corrélation, réalisé sur une plate-forme, est la mise en œuvre logicielle d'une méthodologie de corrélation qui doit résoudre les ambiguïtés et les informations contradictoires pour fournir aux autres plates-formes, une synthèse des informations de surveillance utiles du point de vue opérationnel.
Les ambiguïtés possibles incluent
- les pistes manquées,
- les pistes supplémentaires,
- ou des erreurs de position et de vitesse.
Du point de vue d'une plate-forme,
- La corrélation des pistes locales avec les pistes distantes (Remote) reçues sur la liaison 16, est utilisée pour déterminer l'unité chargée de la transmission, afin qu'une piste ne fasse l'objet que d'un seul report.
Cette restriction maximise l'utilisation de la capacité de la liaison. Elle élimine 'la confusion' que des reports de pistes multiples peuvent engendrer, sur les systèmes de commandement et de contrôle actuels (C2).
- Après corrélation entre une piste locale et une piste externe (Remote),
- le Track Number le plus petit est conservé, sauf en cas d'éventuelles contraintes opérationnelles[trad 33] qui imposent la conservation du TN le plus grand.
- seuls les éléments cinématiques issus des senseurs locaux sont considérés pour la visualisation,
- les informations externes sont mémorisées et viennent le cas échéant, enrichir les données locales ; c'est particulièrement le cas pour les informations altitude et IFF.
- une piste est reconnue corrélée tant que la plate-forme ne prend pas la Responsabilité de Report (R2); selon l'AdatP-33, elle prend l'appellation de "Common Local Track"
- Lors de la prise de R2, le lien de corrélation est cassé car la plate-forme ne reçoit plus de données "position/cinématique" externes ; selon l'AdatP-33, elle prend l'appellation de "Local Track". Cependant, l'"enrichissement" apporté par les données externes (ID, IFF...) est conservé.
Sur une plate-forme donnée, la dé-corrélation , ne peut donc être réalisée que sur une piste Common Local Track, c'est-à-dire que par le système de mission d'une plate-forme C2, ne détenant pas la R2 de la piste devant être dé-corrélée.
En résumé, une piste est
- "Local" sur la plate-forme détenant la R2,
- "Common Local" ou "Remote" sur les plates-formes ne détenant pas la R2.
La décorrélation sur une plate-forme
- Vu du réseau, la décorrélation consiste à faire cesser l'état de transmission d'une seule piste pour deux objets du mode réel.
- Vu de la plate-forme à l'origine de la décorrélation, cela se résume à un changement du Track Number de la piste détenue localement. A l'issue de ce changement de Track Number, les messages de 2 pistes, chacune correspondant à un objet du monde réel, circulent sur le réseau.
Les messages de gestion de la situation tactique
Les plates-formes ne possédant pas la R2 disposent de messages de gestion pour apporter de nouvelles données externes (autres que "position/cinématique") à l'unité possédant la responsabilité de report (R2).
La Qualité de Poursuite (TQ) et la responsabilité de report (R2)
 Console tactique d'un E-3 (avant modernisation)
Console tactique d'un E-3 (avant modernisation)La combinaison de la Responsabilité de Report (R2) et de la qualité de la poursuite (TQ : Track Quality) est utilisée par les liaisons de données tactiques pour entretenir la qualité de l'image tactique (en limitant des ambiguïtés) et minimiser la charge des échanges sur les liaisons[173].
La mesure de qualité de piste TQ, est utilisée pour établir l'Unité la plus appropriée pour transmettre une piste AIR ou SURFACE.
En données de série-J la valeur de la TQ des pistes temps réel va de 1 (valeur minimale) à 15 (valeur maximale). Une valeur de précision en position, définit chaque valeur de TQ, à part la valeur de TQ=0, qui définit une piste non temps réel. La plus haute valeur de TQ exige une précision supérieure à 50 pieds[174].
La TQ est une information contenue dans chaque message piste de catégorie Air ou Surface.
L'unité possédant la meilleure TQ assume alors la responsabilité du report (R2) jusqu'au moment ou une autre Unité possédera une TQ suffisamment plus haute pour reprendre la R2 de la piste.
La notion R2 ne se limite pas aux Pistes AIR et SURFACE auxquelles est associée la notion de TQ. Elle s'applique également aux points de référence, aux points d'urgence, aux surfaces, comme par exemple en lutte anti-sous-marine, les "NOTACK area" qui définissent une zone attribuée pour un temps donné à un sous-marin AMI et dans laquelle toute attaque est interdite.
Les numéros de piste (Track Number)
Les Numéros de Pistes (en anglais Track Number et en langage commun TN) est l'identifiant (le nom) d'une piste. Il est composé de deux termes Alphanumériques (codés sur 5 digits) et de trois termes numériques codés sur trois digits. Il se présente donc sous la forme A.A.N.N.N (N en octal).
Dans le cadre du réseau logique unique actuellement mis en œuvre, le dataforwarder permet l'échange d'ordres de coordination entre des unités mettant en œuvre des liaisons de Données Tactiques différentes. (par exemple, la Liaison 16 et la Liaison 22).
Dans un réseau logique multi liaisons, les numéros de pistes sont communs à toutes les liaisons de données tactiques. les TN inférieurs à 077778, sont appelés LowTN et sont partagés avec les TN de la série-M (liaison 11). les TN supérieurs à 077778 sont appelés HighTN ; ils ne sont disponibles que pour les liaisons de données tactiques de série-J.
Dans le monde des données de série-J, le nombre de TN permet de désigner environ 524.000 pistes, alors que dans celui des données de série-M, (celui de la Liaison 11) il est limité à 4092. C'est la raison principale de l'abandon de la Liaison 11 dans les opérations d'envergure.
 USS Sides
USS Sides USS Vincennes
USS Vincennes USS Spruance
USS SpruanceL'inadéquation du nombre de "Track Number" disponibles en Liaison 11 par rapport au besoin opérationnel, a été cruellement mis en évidence le 3 juillet 1988 à bord de l'USS Vincennes (CG-49), lorsque ce navire a abattu l'Airbus du vol 655 Iran Air. Ce jour là, de nombreuses plates-formes participaient au réseau Liaison 11.
 Airbus A300 Iran Air 655
Airbus A300 Iran Air 655Le vol 655 Iran Air a été transmis par le Vincennes sur la Liaison 11 par la piste numéro 4474 (TN 4474), tandis que l'USS SIDES (FFG-14) l'a transmis avec le TN 4131[175].
Après un moment, consécutivement à la corrélation des deux pistes sur l'USS Vincennes , seul le TN 4131 a été conservé pour le vol 655 Iran Air.
Plus tard, l'USS Spruance (DD-963) croisant à 150 milles nautiques de là, attribua le TN 4474 à un A6 Intruder qui était en approche d'atterrissage loin des opérations. Cela entraîna une erreur dans l'appréciation de la trajectoire de l'Airbus lorsque le commandant du Vincennes posa la question "What is 4474 doing?" en pensant que ce numéro de piste était toujours celui attribué au vol 655 Iran Air[176].
Le fait que l'A6 Intruder était en descente alors que l'Airbus A300 était en montée, a participé au déclenchement du drame qui devait coûter la vie à 290 passagers[177].
Ce retour d'expérience, et le nombre élevé de numéros de pistes disponibles pour les liaisons de données de la Série-J, ont exclu pour la liaison 16, l'utilisation du TN POOL (plusieurs plates-formes utilisent le même bloc de numéros de piste) qui était en vigueur dans le réseau liaison 11 lors de cet évènement.
De plus, cela a permis de lever les réticences de nombreuses marines, dont la Marine Nationale, à abandonner la Liaison 11 au profit de la Liaison 22.
Il faut remarquer cependant, qu'en début 2010, soit 22 ans après la tragédie du vol 655 Iran Air, aucune des plates-formes opérationnelles - en particulier, celles du groupe aéronaval - ne disposait de la Liaison 22. Ce n'est qu'à partir de la mise en œuvre de la Liaison 22 en complément de la Liaison 16, que la Marine Nationale disposera d'un réseau de liaisons de données tactiques, homogène lui permettant de dialoguer au même niveau que le réseau multi-liaisons de l'US Navy.
Certaines plages de TN ont des affectations particulières :
- de 000018 à 000768 : Ces numéros sont affectés à de Interfaces Units (IU prend en compte tous les participants actifs à l'un des réseaux en fonction sur le théâtre d'opération) et prioritairement au Participating Units (PU : les PUs sont les IU participant à la liaison 11-A)
- 000778 : Ce numéro est interdit en opération. Il était utilisé aux USA, lors des exercices, par un AEW des forces "bleue" pour transmettre, généralement en liaison 11, les pistes détectées aux forces "orange" et ainsi faire l'économie du vol d'un second AEW au profit des forces "orange".
- de 001008 à 001758 : Ces numéros sont affectés à de Interfaces Units et prioritairement au Reporting Units (RU : les RUs sont les IU participant à la liaison 11-B)
- 001768 : Numéro réservé à l'unité effectuant la passerelle entre la Liaison 11 et la Liaison 16 ( le Dataforwarder)
- 001778 : Numéro destiné à indiquer qu'un message d'ordre est diffusé (Toutes les unités sont destinataires du message)
- 077778 : Numéro réservé pour le gestionnaire du réseau
Dans le message "OPSTASK LINK", le JICO attribue à chaque IU un bloc de numéro de piste, dans lequel elle prendra le TN qu'elle affectera automatiquement à une piste au moment de son émission selon la méthode First in, first out. Cependant, les opérateurs peuvent attribuer manuellement, n'importe lequel des TNs hors de la plage des TNs affectée à leur plate-forme Le TN n'est en aucun cas une indication sur l'IU à l'origine de la diffusion de la piste mais uniquement sur l'unité à l'origine de sa création, si le TN a été attribué automatiquement.
Les JU (JU : IU Liaison 16) peuvent avoir n'importe quel numéro Numérique (en octal) soit N.N.N.N.N.
Dans un réseau logique qui n'est pas exclusivement de série-J, les JU Non-C2 ne peuvent avoir de TN inférieur à 0.0.2.0.08 car elles sont retransmises en Liaison 11 par le dataforwarder en tant que pistes et non en tant qu'IUs.
La guerre électronique ou Electronic Warfare[178]
La fonction "Guerre Électronique" bénéficie au maximum des taux élevés de mises à jour offerts par la Liaison 16 dans le Groupe de Participation EW. Elle offre des possibilités de recherches et d'analyses coordonnées effectuées par des plates-formes dont la fonction principale ou secondaire est la Guerre Électronique.
Elle permet de répondre au besoin de plus en plus fort de coordination entre les plates-formes ISR[acro 52] et les plates-formes C2[179].
Rôle des Plates-formes SIGINT dans le réseau Tactique
 Dupuy-de-Lôme : Bâtiment SIGINT non-intégré au réseau tactique - Il ne met pas en œuvre la Liaison 16
Dupuy-de-Lôme : Bâtiment SIGINT non-intégré au réseau tactique - Il ne met pas en œuvre la Liaison 16La fonction "Guerre Électronique" est mise en œuvre grâce à l'échange de messages EW bruts (EW Parametric) entre les plates-formes C2 et les plates-formes Non-C2, sur le Groupe de Participation EW.
En théorie, une seule unité C2 du réseau est chargée, à partir de ces données brutes (EW Parametric), de créer et de disséminer les informations de "Guerre Électronique" consolidées (EW Product) sur le Groupe de Participation SURVEILLANCE. Pour assurer cette fonction, il faut que cette plate-forme porte la marque ou supporte l'autorité chargée de l'identification SIGINT ou SIA[acro 16], et dispose des moyens techniques et humains nécessaires à la réalisation pratique de cette fonction. Ce besoin est exprimé, de manière implicite, depuis des années par l'armée de l'air[180].
En pratique, peu d'unités C2 possèdent la capacité technique d'effectuer cette tache. Mais l'intégration des avions SIGINT[181] dans le réseau Liaison 16 devrait à partir de 2010 améliorer la fonction de "Guerre Électronique" du réseau Liaison 16 particulièrement dans les fonctions ELINT[182] et COMINT[183]. Ces plates-formes permettent d'enrichir l'image tactique à partir d'un référentiel de l' Ordre de bataille pré-établi.
La Guerre Électronique et Le concept d'opération de la guerre en réseau
 Boucle OODA
Boucle OODAL'accélération de la boucle OODA[184],[acro 53], est la première application du concept de guerre en réseau ou NCW, elle entraîne l'obligation, pas toujours acceptée par les spécialistes de la Guerre Électronique, d'intégrer les aéronefs SIGINT au niveau tactique, dans le réseau Liaison 16. C'est le seul moyen de permettre une réponse quasi immédiate à une nouvelle menace EW détectée.
En 2009, il était communément accepté que le délais de traitement de la menace ne devait pas excéder 6 minutes pour être efficace[185]. Cela implique également que les avions de chasse participent au Groupe de Participation (NPG) EW, afin d'alimenter l'aéronef C2 SIGINT en données brutes (Parametric data). Dans ce contexte, il est de la responsabilité unique du C2 SIGINT de disséminer les données élaborées (Product Data) sur le Groupe de Participation Surveillance.
Ce concept d'opération[186] est affirmé aux USA dans l'ensemble des documents opérationnels JOINT, AIR, TERRE et MER. Au sein de l'OTAN, il prend plus de temps à s'appliquer en raison des besoins (réels ou imaginaires) de confidentialité des données SIGINT ou COMINT. Le challenge pour les nations appartenant à l'OTAN, est d'apporter leurs contributions dans le domaine tactique sans risquer de dévoiler leur information confidentielle dans le domaine stratégique. Seule une volonté politique partagée par les décideurs nationaux permettra de lever les obstacles rémanents. L'arrivée de nouvelles nations au sein de l'OTAN plus avant-gardistes que celles appartenant aux nations "historiques", pousse en ce sens, car leurs CONOPS s'alignent sur celui des USA.
L'intégration de la "Guerre Électronique" dans les réseaux tactiques est le grand défi de la décennie 2010. Elle entraîne en particulier de revoir complètement l'architecture des systèmes d'information des plates-formes (avions, navires et véhicules terrestres) en permettant en particulier, la connexion directe des sous-systèmes de Guerre Électroniques des plates-formes C2 au groupe de participation EW pour échanger des informations brutes (EW Parametric) ; les système de direction de combat ne traitent que les informations consolidées (EW Product).
La chaîne de commandement est fortement impliquée dans la prise en compte de la Liaison 16 dans la Guerre Électronique. Les responsabilités doivent désormais être partagées entre les Commandants tactiques chargés du traitement immédiat de l'information et les Contrôleurs opératifs chargés de la collecte, de la mémorisation et de la consolidation de la même information.
Prise en compte en France de la Guerre Électronique dans le réseau Liaison 16
 Transall GABRIEL
Transall GABRIELPlates-formes C2 de Guerre Électronique
En France, la question de disposer d'un avion SIGINT connecté au réseau tactique au travers de la liaison 16, voire de la Liaison 22, se pose pour le remplacement des deux C-160G Gabriel programmé pour 2017, alors que le projet d'avions de surveillance électronique C-160 SE n'a pas été retenu. Le PEA (Plan d'étude amont) MATRICE[187] commandé par la DGA (Direction Générale de l'Armement) devrait apporter des solutions de connexion Liaison 16[188] au profit des plates-formes de Guerre Électroniques interarmées.
Sur le champ de bataille, la capacité de disposer d'une unité capable d'évaluer en temps réel[189] , les données collectées par ses moyens propres et enrichies des données collectées par des moyens performants externes de type SPECTRA, embarqué sur le Dassault Rafale, et reçues au travers du Groupe de Participation EW, serait un atout majeur dans les domaines de lutte tant AIR/AIR que AIR/SURFACE.
Cette capacité permettrait la mise en œuvre sur le théâtre d'opération de l'autorité d'identification SIGINT (SIA[acro 16]). Cela implique que l'Armée de l'Air accepte ou que l'état-major des armées impose, que le transall Gabriel migre du statut exclusif de collecteur d'information à celui d'avion de guerre électronique polyvalent (avion collecteur d'information et avion tactique de guerre électronique).
Plates-formes Non-C2 de Guerre Électronique
La Marine envisage l’acquisition de drones aériens embarqués, à vocation tactique, dédiés aux missions SA2R[acro 28] dont l’emploi sera complémentaire des hélicoptères embarqués. Le système de drone sera considéré comme un capteur déporté du navire (définition exacte d'une plate-forme Non-C2), à la main du commandant d’unité ou de la force navale.
S’agissant des drones, le programme phare de la Marine est le projet SDAM, qui prévoit, à l’horizon 2016-2019, d’équiper en drones aériens certains types de bâtiments et des bases aéronavales. Un objectif d’état-major a été rédigé dans ce sens par l’état-major de la Marine en 2004[190]
Le COMMAND&CONTROL
Le COMMAND&CONTROL se décompose en trois fonctions principales :
- Entre plates-formes C2
- La coordination des armes
- L'échanges d'ordres au niveau tactique
- Entre une plate-forme C2 et les plates-formes Non-C2 qu'elle contrôle
- Le contrôle de plates-formes Non-C2
Le destinataire d'un ordre de Command&Control peut être présent passivement sur l'interface. Dans ce cas, seule l'attitude de la plate-forme apportera l'information de la bonne réception de l'ordre.
L'ergonomie d'élaboration des messages de COMMAND&CONTROL
Sur les plates-formes C2, l'élaboration des messages de COMMAND&CONTROL doit répondre à des contraintes fortes
- un message doit pouvoir être lancé par un opérateur en moins de 5 secondes, en particulier sous condition de stress
- une réponse à un ordre doit pouvoir être lancée en moins d'une seconde
C'est pourquoi, les systèmes de combat effectuent l'acquisition automatique des numéros de pistes. La saisie manuelle des numéros de pistes est exclue sous les conditions de stress.
Généralement, les règles de construction des messages s'appliquent de la manière ordonnée suivante :
- La cible est hookée[trad 34]
- Le destinataire de l'ordre ou l'arme devant exécuter l'ordre, est désigné
- L'ordre est lancé, généralement en une seule action (action sur un bouton)
- Le système effectue l'acquisition automatique des numéros de pistes
- TN de la Cible,
- TN du destinataire
- ou TN de l'arme et le TN du destinataire étant celui de l'unité contrôlante
- Le message est émis sur la liaison
La coordination des armes
La fonction "coordination des armes" permet aux unités C2 d'échanger les messages nécessaires pour éviter l'engagement dupliqué sur une même cible (Dual Designation).
Elle permet d'échanger les messages nécessaires à l'utilisation optimisée des armes tant celles qui sont embarquées que celles qui sont contrôlées (Plates-formes Non-C2). Par exemple, si un avion de chasse prépare une frappe sur une cible déjà engagée, la plate-forme C2 déjà engageante, s'adressera à l'unité C2 contrôlant l'avion de chasse, pour lever le conflit d'engagement.
De nombreuses études portent sur l'aide à la frappe, apportée par la Liaison 16 pour les missiles. Les travaux portent sur le développement d'un terminal léger en termes de poids, de volume et de prix embarquable à bord d'un missile[191] (Bae System).
Les ordres (COMMAND)
Les messages d'ordres ne sont échangés qu'entre plates-formes C2.
Il s'agit des ordres :
- de coordination, dans la conduite de la mission comme l'ordre d'assurer un tâche donnée "Assume Duty" ou celui de pendre le contrôle d'une unité Non-C2 "Assume Control"
- d'identification, comme de l'ordre d'identifier visuellement un mobile "Visual Ident"
- de sécurité, pour éloigner une plate-forme d'un secteur dangereux "Salvo"
- d'engagement, comme celui d'engager une cible avec un avion de chasse "Engage with Aircraft"
Le contrôle (CONTROL)
Les messages de contrôle ne sont échangés qu'entre la plate-forme C2 et les plates-formes Non-C2 qu'elle contrôle.
La fonction CONTROL permet l'échange d'information et d'ordres entre une unité C2 et les unités Non-C2 qu'elle contrôle (essentiellement des avions de chasse, des bombardiers, des aéronefs de renseignement et de Guerre Électronique, des aéronefs à voilure tournante).
La fonction CONTROL est essentiellement mise en œuvre par la Liaison 16. Cependant, il n'est pas exclu qu'à l'avenir cette fonction soit disponible pour la Liaison 22 et la liaison J-over-IP.
La fonction CONTROL devient essentielle du fait que les aéronefs Non-C2 partent de plus en plus souvent en mission sans connaître leurs cibles. A titre d'exemple en 2003, lors de OIF (Operation Iraqi Freedom), 40% des sorties des B2 voyaient leurs cibles changées en vol[161], la Liaison 16 est le meilleur moyen de conduire un changement de mission des aéronefs Non-C2 en vol.
La fonction CONTROL a pris une importance essentielle par la nécessité de frapper rapidement la cible après sa localisation. Le but affiché par les commandants tactiques est de frapper les cibles sensibles en moins de 10 minutes[185] après localisation et identification.
La fonction CONTROL a été mise en œuvre en premier par l'US Navy ; C'était l'une des fonctions de la Liaison 4. Les plates-formes Non-C2 étaient des avions de chasse (essentiellement des F-14), qui "descendaient" leurs informations vers les bâtiments de la force navale. Ces derniers "remontaient" vers les avions, les pistes et les points de référence de la situation tactique. C'est pourquoi :
- les échanges des plates-formes Non-C2 vers les plates-formes C2, sont appelés DownLink
- les échanges des plates-formes C2 vers les plates-formes Non-C2, sont appelés UpLink
La fonction CONTROL n'est pas limitée au contrôle des aéronefs, elle s'applique également au contrôle des stations missiles Sol-Air.
L'allocation des TimeSlots du groupe de participation CONTROL est partagée par les échanges du contrôle DownLink et ceux du contrôle UpLink,
Le contrôle DownLink
Les détections des plates-formes Non-C2 sont "descendues" vers les plates-formes C2. Elles seules ont la responsabilité de créer et de mettre à jour les pistes, après avoir effectué des tentatives de fusion des détections reçues des Non-C2 avec celles de leurs propres senseurs.
Les hélicoptères de lutte anti sous-marine "descendent" vers la plate-forme C2 qui les contrôle,
- les détections de bouées acoustiques (relèvements, cercles de détection, "relèvements + distances").
- les détections issues des sonars "trempés".
C'est le cas des EH101 HM.1 de la Royal Navy ; Aucune décision n'avait été prise dans ce sens en 2009, pour les NH-90 de la Marine nationale.
Les plates-formes Non-C2 "descendent", les réponses aux ordres d'engagement et de guidage, ainsi que les états d'engagement.
Le contrôle UpLink
Les plates-formes C2 "remontent" vers les plates-formes Non-C2, le lien entre leurs détections et les pistes disséminées sur le groupe de participation SURVEILLANCE.
Les plates-formes C2 "remontent" également, les ordres d'engagement, les ordres de guidage et les plans de vol.
Le Changement d'unité contrôlante - Handover
Le Handover est une phase essentielle des opérations mettant en œuvre des Plates-formes C2 et des plates-formes Non-C2. Le Handover permet à une plate-forme Non-C2 de changer de plate-forme C2 contrôlante, sans échanger le moindre mot en phonie.
Le Handover illustre bien, l'utilisation des différents NPG, ainsi que le concept d'emploi de la Liaison 16 dans le contrôle des aéronefs Non-C2.
On distingue :
- Le Handover qui consiste en des échanges de messages entre la plate-forme C2 perdante (celle qui abandonne le contrôle) et la plate-forme gagnante (celle qui prend le contrôle)
- Le Handshake qui consiste en des échanges de messages entre la plate-forme C2 perdante ou gagnante et la plate-forme Non-C2 objet du Handover
Handover à l'initiative de la plate-forme C2 perdante
NPG "Mission Management" :
La plate-forme C2 perdante indique qu'elle contrôle la plate-forme Non-C2
Début de Handover
NPG "Mission Management" :
La plate-forme C2 perdante demande à la plate-forme C2 gagnante de prendre le contrôle de la plate-forme Non-C2
HandShake 1
NPG "Control"
- Après acceptation de la plate-forme C2 gagnante, la plate-forme C2 perdante
- ordonne à la plate-forme Non-C2 de changer d'unité Contrôlante
- lui transmet les informations relatives à l'unité C2 gagnante :
- le numéro de Net du NPG Control,
- le Canal phonie du NPG Voice-A ou Voice-B, ou la fréquence phonie,
- le "Voice Call Sign"
HandShake 2
NPG "Control"
- Lors de l'acceptation de l'ordre par le pilote, le système de la plate-forme Non-C2 :
- Ordonne au terminal MIDS de se caler sur le N° de NET (NPG CONTROL) de la plate-forme C2 gagnante
- Transmet à la plate-forme C2 gagnante une demande de prise sous contrôle
- La plate-forme C2 gagnante accepte (ou refuse) la demande
Fin de Handover
NPG "Mission Management" :
Après acceptation de la plate-forme C2 gagnante,
- Celle-ci indique qu'elle contrôle la plate-forme Non-C2, dans le message "Controlling Report"
- sur réception du message de contrôle "Controlling Report", émis par le gagnant, la plate-forme C2 perdante cesse d'émettre le sien.
Handover à l'initiative de la plate-forme Non-C2
Cette phase est généralement déclenchée par un avion Non-C2
- Après décollage ou catapultage
- Lors de l'arrivée dans un théâtre d'opération éloigné
Elle se limite en fait à un HandShake entre la plate-forme NonC2 et la plate-forme C2 gagnante.
HandShake
NPG "Control"
- Sur ordre du pilote, le système de la plate-forme Non-C2 :
- Ordonne au terminal MIDS de se caler sur le N° de NET (NPG CONTROL) de la plate-forme gagnante (Information obtenue dans le message PPLI)
- Transmet à la plate-forme gagnante une demande de prise sous contrôle
- La plate-forme gagnante accepte (ou refuse) la demande
Fin de Handover
NPG "Mission Management" :
Après acceptation de la plate-forme C2 gagnante,
- Celle-ci indique sur le NPG "Mission Management" qu'elle contrôle la plate-forme Non-C2
Description Technique
L'architecture et le contenu de cette partie est très largement tirée du document intitulé
"Link 16 Operations for the Air force Wing and Unit Manager"
Ce document a été édité en octobre 1999 et écrit par Paul S Rempfer de MITRE Corporation. Il est complété par des retours d'expérience (RETEX) collectés durant les années 2000.
L'entrée en réseau
Généralités
Chaque terminal JTIDS/MIDS possède une horloge électronique. Cependant, les horloges ne fournissent pas aux terminaux une précision commune suffisante de l'heure réseau pour faire fonctionner le réseau de la Liaison 16 (c'est-à-dire, une précision qui permet à tous les terminaux de partager les mêmes "frontières" temporelles des timeslots).
Il y a deux approches fondamentales pour permettre au participant de partager une heure réseau avec une précision suffisante.
- La première approche consiste à utiliser une base de temps relative. Avec une base de temps relative, un et seulement un participant est désigné référence de temps du réseau (NTR : Net Time Reference). On considère alors que l'horloge du NTR possède le temps de réseau parfait. Les participants Non-NTR du réseau corrigent leurs horloges afin de se synchroniser avec l'horloge du NTR. L’heure du NTR peut être imprécise en termes absolus, mais seule est exigée une précision suffisante de l'heure réseau commune à tous les participants, pas une précision d’heure en absolu.
- La deuxième approche est, pour chaque participant, d'utiliser une base de temps établie auprès d'une référence de temps externe. La référence de temps externe utilisée pour la Liaison 16 est le temps GPS. On considère que l'heure réseau est l'heure du GPS. Les participants au réseau se synchronisent à la référence de temps externe (ETR) en s'interfaçant face à un récepteur GPS. De cette façon, les participants obtiennent une bonne précision de l'heure réseau et de l'heure absolue. Ce sont les mêmes heures.
Jusqu'en 2008, Les réseaux Liaison 16 ont principalement mis en œuvre une référence d'heure relative. Cependant, le fonctionnement avec une base de temps GPS offre des avantages significatifs.
La synchronisation grossière (Coarse Synch)
Pour commencer le processus de synchronisation de réseau, l'opérateur de la plate-forme référence de temps (NTR)
- initialise son terminal en tant que NTR,
- ajuste l'horloge de son terminal à l'heure désirée
- envoie ensuite au terminal, une commande d'entrée dans le réseau.
Puisque le terminal est NTR, l'heure de l'horloge de son terminal devient l'heure du réseau. Le terminal se déclare immédiatement synchronisé et commence à fonctionner sur le réseau (il transmet et il reçoit). L'un des premiers messages que le NTR transmet est un message "Initial Entry". Le message "Initial Entry" est envoyé une fois par 12" sur le net 0 dans un TimeSlot réservé que l'on appelle le TimeSlot "Initial Entry".
Le modèle de sauts de fréquences est fonction des clés de crypto et du numéro de net. Cependant, le fait d'utiliser le même chiffrage tous les jours et pour tous les TimeSlots augmenterait la vulnérabilité du système. Donc, le terminal change le chiffrage utilisé pour le modèle de sauts de fréquences et pour le chiffrage des messages après chaque période de 24 heures : Les clés de crypto sont changées, pour que les mêmes modèles de chiffrage/et de sauts ne soient jamais répétés.
Pour se synchroniser au réseau, l'opérateur du terminal d'une plate-forme entrante,
- ajuste son horloge le plus précisément possible de l'heure réseau,
- fournit une évaluation de l'incertitude temps et
- transmet une commande "Initial Entry" au terminal.
Le terminal attend la réception du prochain message "Initial Entry" émis par le NTR. Il évalue l'heure de transmission en tenant compte de l'incertitude. Le Terminal entrant commence donc à chercher le modèle de sauts de fréquences et le message "Initial Entry" associé au prochain TimeSlot "Initial Entry". Le message "Initial Entry" recherché sera reçu si l'incertitude réelle de l'horloge du terminal est inférieure à la valeur indiquée par l'opérateur. Lorsque le terminal entrant reçoit le message Initial Entry, il mesure l'heure d'arrivée, référencée à son heure horloge. Il connait l'heure à laquelle le message a été transmis, référencée au temps de réseau. Il peut alors :
- calculer l'erreur entre l'heure de son horloge et celle du réseau en tenant compte du retard de propagation entre le NTR et lui-même,
- corriger l’heure de son horloge et se déclarer en synchronisation grossière "COARSE SYNCH".
Le terminal connait de manière suffisamment précise l'heure réseau pour interpréter les messages - empaquetés en Standard ou en P2SP - de tous les autres participants et poursuivre le processus de synchronisation.
La synchronisation fine (Fine Synch)
Une fois atteint la synchronisation grossière (Coarse Synch), le terminal entrant commence à transmettre les messages d'interrogation Round Time Timing (RTT) au NTR. Les messages RTTs sont des messages Particuliers car l'unité NTR transmet un message de réponse (RTT-R) dans le même TimeSlot que celui où il a reçu l'interrogation (RTT-I).
- Sur le NPG RTT-A, les messages RTT sont adressés à l'unité qui possède la meilleure la Qualité de Temps (TQ) parmi tous les messages PPLI reçus (la plupart du temps, il s'agit de l'unité NTR qui seule possède une TQ = 15)
- Sur le NPG RTTB-B, les messages RTT sont diffusés vers toutes les unités sur le Numéro de net du PG RTT-B correspondant à la valeur TQ la plus haute reçue par le terminal. Si le terminal entrant est en portée radio du NTR, il se positionnera donc sur le Net 15 du NPG RTT-B, sinon, il se positionnera sur le Net de (ou des) IEJU (voir plus loin) en portée radio possédant la meilleure TQ.
- Le NTR (ou une IEJU) reçoit le message d'interrogation (RTT-I). Le terminal du NTR (ou de l'IEJU) mesure l'heure de l'arrivée du RTT-I - référencée au temps réseau - et le terminal transmet une réponse (RTT-R) dans le même TimeSlot.
La réponse contient l'heure de réception de l'interrogation et sa transmission s’effectue donc dans le même timeslot et commence à un temps fixé après le début du TimeSlot. Le terminal entrant reçoit le message de réponse RTT-R et mesure son heure d'arrivée référencée à son horloge. Le terminal entrant calcule précisément l'erreur entre le temps de son d'horloge et le temps de réseau du NTR. Il connaît :
- l'heure de réception mesurée par le NTR référencée dans l'heure réseau (TI),
- l'heure à laquelle la réponse a été transmise référencée à l'heure réseau (TD) et
- l'heure d'arrivée de la réponse référencée à son horloge (TR).
Il calcule l'erreur pour commencer à construire un modèle mathématique d'erreur entre l'heure de son horloge et l'heure réseau. Il continue à émettre des interrogations RTT-I et pour chaque réponse RTT-R reçue, il fait un nouveau calcul d'erreur et améliore ainsi son modèle d'erreur d'horloge. Lorsque le modèle d'erreur de son heure horloge est suffisamment précis pour permettre au terminal de prévoir l'heure jusqu'à 15 minutes en l'absence de messages de réponse RTT-R, il se déclare en synchronisation fine "FINE SYNCH". Les messages RTTs sont alors périodiquement échangés afin de maintenir un modèle d'horloge précis.
En réalité, même après qu'il a atteint une synchronisation fine, le terminal continue à améliorer le modèle d'erreur de son horloge. Ce modèle dépend de la stabilité de l'horloge. Au démarrage l'heure horloge est moins stable. La dérive de l'horloge varie non linéairement lors de la montée en température de l'équipement. Une fois que l'horloge est stabilisée en température, la dérive du temps horloge évolue beaucoup plus lentement avec le temps. Le terminal obtient un modèle stable de l'erreur de son horloge avec une très faible erreur résiduelle. Ainsi, l'heure interne du terminal peut rester synchronisée avec l'heure réseau même s'il n'est plus en portée optique du NTR. La durée de la conservation de cette synchronisation dépend de la durée de fonctionnement dans le réseau.
Synchronisation – Re-émetteur du message "Initial Entry" (IEJU)
La plupart des participants de réseau, sauf le NTR, sont initialisés en tant que IEJU. Cette fonction est définie en phase de conception du réseau.
Processus
Le processus précédemment décrit est efficace si la plate-forme entrante est en portée optique du NTR, mais cela ne peut pas toujours être le cas. Tous les terminaux peuvent être initialisés en tant que re-émetteur de message "Initial Entry" ; les plates-formes ainsi configurées sont appelées IEJU pour "Initial Entry JTIDS Unit". Une fois atteint l'état de "synchronisation fine", le terminal de la plate-forme IEJU commencera à re-transmettre le message d'entrée initial reçu du NTR. La retransmission est effectuée aléatoirement dans le TimeSlot "Net Entry", une fois toutes les 24 secondes.
Lorsqu'une une Unité IEJU est en portée optique du NTR et qu'une autre unité ne l'est pas, l'unité IEJU entre dans le réseau comme décrit précédemment via le NTR. La seconde Unité attend la réception d'un message "Initial Entry" et le recevra de l'unité IEJU puisqu'elle ne voit pas le NTR. Comme de nombreux de participants sont configurés IEJU, leurs terminaux peuvent tous transmettre le message "Initial Entry" dans les mêmes TimeSlots. Le terminal de la plate-forme entrante ne recevra que le message de la plate-forme la plus proche.
Lorsque la plate-forme entrante est en portée optique d'une seule Unité IEJU, celle-ci peut ne pas transmettre dans le TimeSlot attendu par la plate-forme entrante puisqu'elle transmet le message "Initial Entry" seulement une fois tous les deux TimeSlot "Initial Entry". En cas d'échec, le terminal entrant se met en attente du TimeSlot "Initial Entry" suivant et essaye de nouveau. L'entrée en réseau par l'intermédiaire d'une IEJU plutôt que par le NTR peut prendre plus de temps, en raison de la possibilité de devoir faire face à quelques échecs.
Qualité de temps
Les terminaux entretiennent une évaluation de leur précision de temps (c'est-à-dire, une évaluation de leur erreur résiduelle). Cette précision est transmise dans leur message PPLI, c'est la qualité de temps. La valeur de qualité de temps la plus haute est "15" et seul le NTR possède cette qualité de temps. Une fois en synchronisation grossière (Coarse Synch), le terminal entrant essaye d'obtenir synchronisation fine (Fine Synch). Il commence à recevoir les messages PPLIs des autres unités, et entretient une table des terminaux qu'il reçoit avec la qualité de temps la plus haute. Il interroge (RTT-I) alors le terminal, qui possède la qualité de temps la plus haute dans sa table, pas nécessairement le NTR. S'il échoue à obtenir une réponse, il transmet un message RTT-I à la meilleure source suivante dans sa table, etc. De cette façon, les terminaux (sauf celui du NTR) entretiennent automatiquement la meilleure qualité de temps possible.
Synchronisation – Implémentation particulière
Le JTIDS Classe 2 et le terminal FDL ont une incertitude de temps qui est de 6 secondes multiplié par le nombre de jours écoulés depuis la dernière synchronisation. (FDL : Fighter Data Link.) Il s'agit d'un terminal MIDS aux performances dégradées (la phonie n'est pas disponible et la puissance d'émission est limitée à 50 watts versus 200 watts voire 1000 watts pour les MIDS LVT et le JTIDS[106]), implémenté en particulier sur les F-15 et F-16.
Cette valeur calculée d'incertitude de temps est utilisée pour l'entrée en réseau à moins que l'opérateur n'entre manuellement l'heure de l'horloge du terminal. Lorsque l'opérateur entre l'heure, il peut aussi entrer l'incertitude avec une valeur minimale de 6 secondes et jusqu'à 60 secondes. Six secondes d'incertitude est court et si le temps de l'horloge est en avance de plus de 6 secondes sur le temps du réseau, le terminal ne peut jamais réaliser la synchronisation grossière (c'est-à-dire, le TimeSlot attendu peut être dépassé). Ainsi pour entrer en réseau, il est recommandé pour l'opérateur d'entrer l'heure et d'utiliser une 1 minute d'incertitude (sur les E-3, l'incertitude est généralement de 36 secondes). Bien sûr, cela allonge le temps d'entrée en réseau puisque le terminal attend le TimeSlot "Initial Entry" pendant au moins une minute. Cependant, cela augmente la probabilité d'entrer en réseau.
La situation parfaite pour ne pas entrer l'heure et laisser le terminal utiliser l'incertitude par défaut de 6 secondes se présente lorsqu'une plate-forme quitte un réseau et souhaite immédiatement rentrer dans ce même réseau (un Arrêt – Marche peut sauver bien des situations!). Le pilote sait que le temps corrigé de son horloge est excellent, et qu'une incertitude basse précipitera le processus de rentrée. Une fois que le terminal a commencé à entrer dans le réseau, l'opérateur verra l'état de synchronisation passer de "PENDING" à "COARSE SYNCH". Le processus de synchronisation fine sera amorcé et devrait être atteint en 30 secondes donc l'opérateur devrait voir l'état de synchronisation passer à "FINE SYNCH".
Comme nous l'avons vu précédemment, une fois en "COARSE SYNCH", les participants doivent échanger des messages RTT pour acquérir et entretenir l'état "FINE SYNCH". Les messages RTTs sont normalement échangés dans les groupes de participation (NPGs) 2 ou 3 basé sur les qualités de temps reçues dans les messages PPLIS. La différence entre les deux NPGs n'est pas importante pour les opérateurs. Cependant, dans les réseaux qui sont limités en capacité, comme ceux conçus sous les contraintes de compatibilité électromagnétiques en temps de paix, les NPGs RTT peuvent être absents. Les terminaux effectueront alors par préemption les échanges RTTs dans un TimeSlot PPLI occasionnel. Cela doit être connu des pilotes des avions de chasse parce qu'il affecte le taux de mise à jour des PPLI. Par exemple pour les F-15, les PPLIs sont normalement échangés toutes les 3 secondes. De temps en temps, un TimeSlot PPLI est déjà préempté par un message "Platform and System Status" qui fournit les réserves en carburant, l'état des armements, etc. S'il n'y a aucun NPG RTT d'assigné, environ toutes les 48 secondes, un TimeSlot PPLI sera également préempté pour l'échange de messages RTT .
Synchronisation – External Time reference (ETR)
Donc sur le réseau liaison 16, un terminal est désigné comme Référence du Temps de Réseau (NTR). Le NTR peut recevoir la Référence de Temps d'une source externe (par ex. le GPS). Ce terminal est alors appelé Terminal ETR/NTR. Il est la source du temps de référence auprès duquel tous les participants au réseau liaison 16 obtiendront l'heure nécessaire pour atteindre et maintenir la synchronisation au sein du réseau[192].
Dans un réseau liaison 16, auquel participent des plates-formes synchronisées à une référence horaire externe et des plates-formes sans référence, le NTR doit impérativement être ETR/NYR.
Synchronisation – Changement de NTR
Un réseau de base de temps relatif ne doit avoir qu'une et une seule référence de temps (NTR).
C'est pourquoi, lors d'un changement de NTR, il est nécessaire de passer par une étape où aucun NTR n'est présent pour une courte période de temps. Les terminaux ont la capacité de rester synchronisé pendant une longue période de temps en l'absence d'échange de messages RTT. En conséquence, la Qualité de Temps du réseau entier diminuera en l'absence de NTR, mais il faudra attendre de nombreuses minutes avant de perdre toute communication. Cela ne veut cependant pas dire qu'un réseau doit pouvoir fonctionner longtemps sans NTR.
Quelques plates-formes sont très dépendantes de la navigation des terminaux de la Liaison 16 et la Qualité de Navigation est directement liée à celle de la Qualité de Temps. Il est donc nécessaire de garder une Qualité de Temps aussi haute que possible pour garantir une capacité de navigation Liaison 16 maximale. Un réseau Liaison 16 ne devrait pas fonctionner sans NTR plus que quelques minutes.
La fonction navigation de la Liaison 16, est la raison principale pour laquelle l'absence de NTR pour plus que quelques minutes n'est pas souhaitée. Une synchronisation perturbée résultant de la présence de deux NTRs dans le réseau met en péril la navigation Liaison 16.
En résumé, le changement de NTR doit être soigneusement coordonné pour s'affranchir du risque de la présence de plusieurs NTRs. Il est préférable de n'avoir aucun NTR pendant quelques minutes.
Le nouveau NTR devrait être la JU possédant la meilleure Qualité de Temps du moment afin d'éviter de perturber toutes les plates-formes synchronisées.
Synchronisation – Difficultés souvent rencontrées
Si une plate-forme entre dans un réseau et atteint l'état "FINE SYNCH" sans recevoir de messages en provenance des participants de réseau, cela peut être la conséquence de la présence de multiple NTRs comme décrit ci-dessus. Si la plate-forme entrante ne peut atteindre "COARSE SYNCH", cela est généralement dû à l'entrée d'une mauvaise valeur du temps courant ou à une erreur de clés de crypto.
Lorsqu'un terminal entre dans un réseau Il attend la réception du message "INITIAL ENTRY" émis par le NTR ou par une "IEJU". Le terminal cherche la réception du prochain TimeSlot "Initial Entry" en fonction de son temps horloge et des clés de crypto du jour. Le TimeSlot INITIAL ENTRY doit réellement apparaitre dans le réseau dans un temps inférieur à la valeur d'incertitude. Si le Terminal ne rentre pas en COARSE SYNCH, il faut donc vérifier :
- L'heure
- L'incertitude
- Les Clés de Crypto
Le JTIDS Classe 2 et les terminaux MIDS utilisent le TimeSlot INITIAL ENTRY pour atteindre COARSE SYNCH indépendamment des données d'initialisation. Donc, une conception de réseau incorrecte ou une erreur de chargement des fichiers d'initialisation ne sont pas normalement la cause d'un échec de passage en COARSE SYNCH.
Une difficulté de synchronisation peut être due à une erreur de la plate-forme entrante ou du NTR lors du démarrage du réseau. Il est indispensable que chaque participant utilise les clés de crypto du jour. Si les clés sont correctes, il faut vérifier l'heure. Par exemple, il se peut que le NTR ou que la plate-forme entrante, aient utilisé une horloge de référence possédant une erreur de temps absolue significative (par exemple, une minute ou plus) pour entrer l'heure dans l'horloge du terminal. Si cette erreur de temps est supérieure à l'incertitude de temps utilisée (une minute pour le Terminal JTIDS), la plate-forme entrante ne peut pas passer en COARSE SYNCH. Si un participant ne peut pas atteindre FINE SYNCH, il se peut que se soit un problème lié aux NPGs RTT qui ne possèdent pas les mêmes TimeSlots dans des réseaux différents.
Synchronisation – Radio silence, synchronisation passive et limitations en distance
Il peut y avoir des circonstances lors desquelles l'émission de signaux Liaison 16 est dangereuse pour une plate-forme.
- Le terminal FDL (Fighter Data Link) possède un mode de transmission nommé "Radio Silence". Dans ce mode, le terminal reçoit des données.
- Les terminaux JTIDS Classe 2 et MIDS possèdent deux modes liés.
- Le mode "Data Silence" qui est l'équivalent au "Radio Silence" du FDL.
- Le mode "Radio Silence" qui interdit la transmission des données et de la voix.
Dans chacun de ces deux derniers modes, il est nécessaire que le terminal maintienne l'état FINE SYNCH, afin qu'il puisse recevoir des messages et être prêt à transmettre rapidement dès le retour à l'état de transmission "NORMAL". Le maintien en FINE SYNCH doit d'effectuer sans envoyer de messages d'interrogation RTT-I et donc en mettant en œuvre une synchronisation passive.
Pratiquement, tous les systèmes hôtes des plates-formes fournissent leurs positions aux terminaux Liaison 16. Chaque terminal transmet donc la position de sa plate-forme dans le message PPLI. Un terminal en "Radio Silence" ou en "Data Silence" est capable d'atteindre "COARSE SYNCH" sans devoir émettre. Une fois en "COARSE SYNCH", le terminal est synchronisé, à l'erreur près du temps de propagation du message INITIAL ENTRY reçu.
- Il utilise normalement les messages RTTs pour éliminer le retard de propagation et calculer l'erreur de synchronisation
- Mais, en l'absence de messages RTTs, il peut utiliser sa propre position propre reçue du système hôte et celles des participants déjà dans le réseau, reçues dans leurs messages PPLI, pour évaluer la distance, et donc le retard dû au délai de propagation et en déduire l'erreur d'horloge d'une manière proche de celle utilisant les RTTs.
C'est juste un peu plus imprécis (par exemple, l'hôte ne peut pas connaître sa position avec la même précision en conséquence, le délai de propagation retenue est donc moins précis).
Les terminaux Liaison 16 sont normalement initialisés comme “PRIMARY USER”. Cela est défini en conception de réseau. Un “PRIMARY USER” essaye d'atteindre et de maintenir la meilleure Qualité de Temps en utilisant le mieux possible les messages RTTs. Cependant, puisqu'un échange de RTT s'effectue dans un même TimeSlot, la portée est limitée à environ 300 milles nautiques. Ceci est compatible du mode "Normal Range".
Si le réseau est conçu en "Extended Range", une plate-forme initialisée “PRIMARY USER” et qui est positionnée à plus de 300 milles nautiques des participants avec qui elle essaye d'entrer en "FINE SYNCH", échouera à échanger des messages RTTs et verra lentement décroître sa Qualité de Temps. Pour éviter cela, il est nécessaire que la plate-forme soit définie ou qu'elle se positionne "SECONDARY USER". Un terminal "SECONDARY USER" peut employer tant la méthode de synchronisation passive employée en "Radio Silence" que la méthode RTT employée par un “PRIMARY USER”. Cependant, un "SECONDARY USER" n'échange des messages RTTs que si cela permet d'améliorer la Qualité de Position de la solution de la navigation de son terminal. L'échange de messages RTTs ne peut avoir pour but que le maintien d'une meilleure Qualité de Temps ; En conséquence, un "SECONDARY USER" ne peut pas aider les autres participants à améliorer leur Qualité de Temps.
En résumé :
- les participants sont normalement initialisés comme “PRIMARY USER”.
- Un "SECONDARY USER" qui ne peut échanger de messages RTTs peut atteindre et maintenir sa synchronisation passivement
- dans un réseau conçu en "Extended Range", les participants (hors le NTR) sont initialisés en "SECONDARY USER".
Si un participant s'approche d'un réseau fonctionnant en "Normal Range", qu'il est positionné à plus de 300 milles nautiques des autres participants du réseau, et qu'il commence son entrée en réseau alors qu'il se trouve en portée optique d'un participant, il peut atteindre l'état "COARSE SYNCH", malgré une erreur de temps considérable (le terminal considère à tort, qu'il se trouve à une distance inférieure à 300 milles nautiques).
- S'il est "SECONDARY USER" et atteint l'état "FINE SYNCH", il recevra de plus en plus mal les autres participants puis il ne les recevra plus, en raison d'une mauvaise évaluation de l'erreur de propagation.
- S'il est "PRIMARY USER" (condition habituelle des participants à un réseau conçu en mode "Normal Range"), il n'atteindra pas "FINE SYNCH" car il est trop éloigné pour l'échange des messages RTTs.
En résumé, un participant s'approchant d'un réseau fonctionnant en mode "Normal Range", et atteignant l'état "COARSE SYNCH" sans pouvoir atteindre "FINE SYNCH", doit vérifier s'il est à moins de 300 milles nautiques d'un participant avec qui il peut échanger des messages RTTs. Sinon, il doit attendre d'atteindre cette distance pour entrer en réseau.
Synchronisation – Avions en positions rapprochées
Lorsqu'ils ne fonctionnent pas en mode ETR[acro 54], plusieurs participants en positions rapprochées, (avec la même erreur de synchronisation) peuvent devoir faire face à des problèmes pour former un réseau. Nous avons vu précédemment que si deux participants transmettent dans le même TimeSlot, le Terminal en réception ne recevra que le participant le plus proche. Cela n'est vrai que si les participants se situent à des distances différentes du récepteur. Si la distance séparant les émetteurs entre eux, est d'environ 70 mètres, le récepteur n'en recevra aucun. C'est une situation rare, mais pouvant être rencontrée par une patrouille d'avions tentant d'entrer en réseau lors de l'attente du décollage sur le RunWay ou sur le pont d'envol d'un porte-avions.
Si quatre avions stationnent sur un RunWay et essayent de former un réseau en entrant les uns après les autres, la procédure à appliquer est la suivante:
- Le NTR vérifie, et corrige éventuellement l'heure, commence l'entrée en réseau, atteint "FINE SYNCH" et commence à transmettre le message d'entrée initial.
- Le premier participant vérifie, et corrige éventuellement l'heure, commence l'entrée en réseau, reçoit le message "INITIAL ENTRY" du NTR, atteint l'état "COARSE SYNCH", échange des messages RTTs avec le NTR et atteint l'état "FINE SYNCH".
- Le deuxième participant vérifie, et corrige éventuellement l'heure, commence l'entrée en réseau et cherche à recevoir un message "INITIAL ENTRY". Les avions étant initialisés en IEJU, le NTR et premier participant transmettent tous deux un message INITIAL ENTRY dans le même TimeSlot.
Si les distances séparant le deuxième participant du NTR et du premier participant, sont identiques à 70 mètres près. Le récepteur du deuxième participant ne recevra aucun des messages INITIAL ENTRY transmis dans le même TimeSlot. Comme une IEJU ne transmet de message INITIAL ENTRY qu'une fois sur deux, le troisième entrant possède 50% de chance de recevoir le message INITIAL ENTRY émis par le NTR. En moyenne, le troisième entrant devrait attendre 3 minutes pour atteindre l'état FINE SYNCH au lieu de une minute normalement.
Le participant suivant aura lui 25% de chance de recevoir le message INITIAL ENTRY émis par le NTR. Son temps d'attente peut atteindre 7 minutes avant l'acquisition de l'état FINE SYNCH
- C'est pourquoi, dans le cas d'avions devant entrer en réseau alors qu'ils se trouvent en situation rapprochée (RunWay ou pont d'envol d'un porte-avions), il est conseillé que les avions se synchronisent un à un avec le NTR, puis passent en "Radio Silence" jusqu'à ce que l'ensemble de la patrouille soit synchronisé.
Mode de fonctionnement
Dans ce chapitre, sont décrits :
- Le mode d’opérations en distance (Range Mode) qui s'applique à l'ensemble du réseau
- Le mode d'accès en Transmission (Access Mode) qui est défini et qui s'applique NPG par NPG (NPG : Network Participation Group)
- La limite d'Empaquetage (Packing Limit) qui est définie et qui s'applique NPG par NPG
Mode de fonctionnement – Mode d’opérations en distance (Range Mode)
Les impulsions
Un message Liaison 16 est transmis comme une série de symboles de cinq bits. Chaque symbole est transmis sur une fréquence porteuse différente (f), que nous appellerons une impulsion.
L’émission des impulsions s’effectue durant une première partie du TimeSlot. Après la transmission des impulsions, une période de temps dans le TimeSlot est laissée libre afin de permettre au "train" d’impulsions d’atteindre les terminaux de réception avant la fin du TimeSlot et ainsi permettre une nouvelle transmission. S’il en était autrement, un terminal éloigné pourrait déclencher l’émission d’un nouveau train d’impulsions avant que celui du TimeSlot précédent, n'ait eu le temps nécessaire pour l'atteindre.
Le temps de propagation
Le temps de propagation dans un TimeSlot standard est suffisant pour supporter une distance de propagation de 300 NM (Nautical Mile). Cependant, il y existe une option pour étendre cette distance à 500 NM.
La synchronisation dans le TimeSlot
Le terminal en réception doit se synchroniser avec le "train" d'impulsions reçues, pour qu'il puisse prendre en compte les sauts de fréquences, impulsion par impulsion. Ainsi, il peut s’affranchir du brouillage éventuel apporté par d’autres terminaux travaillant sur un autre Net. Le terminal émetteur commence par transmettre des impulsions dont les données et les sauts de fréquences sont connus de tous ; Ces impulsions ne contiennent donc pas de données réelles. Le "train" connu d'impulsions permettant la synchronisation, est appelé préambule. Le terminal en réception met en œuvre ses multiples récepteurs pour chercher le modèle connu. Cette recherche commence au début du TimeSlot. Une fois le modèle trouvé, il peut interpréter les impulsions restantes, qui contiennent les données réelles.
La résistance au brouillage ou "jitter"
Les impulsions transmises ne commencent pas au début du TimeSlot. Une période de temps, varie de TimeSlot en TimeSlot en fonction des clés en transmission (TSEC). Cette période variable est appelée "Jitter". Elle est destinée à contrecarrer un brouilleur spécial conçu pour le préambule de synchronisation. Si le brouilleur peut empêcher la synchronisation, le terminal brouillé ne peut pas recevoir les données. Un brouilleur intelligent permet théoriquement de concentrer la puissance durant la période de synchronisation. En pratique, l'efficacité gagnée ne compense pas les limitations et la complexité associée à ce type de brouilleur, la probabilité de rencontrer un tel brouilleur est faible.
Portées normale et étendue
Comme il est souvent demandé de pouvoir échanger des données entre plates-formes éloignées de plus de 300 NM, on considère qu'une portée limitée à 300 NM est le mode de transmission "NORMAL", mais les terminaux offrent aussi un mode de transmission de portée "ÉTENDUE" de 500 NM avec moins de Jitter.
Le choix entre un mode "NORMAL" ou "ÉTENDU" est transmis au terminal dans ses paramètres d'initialisation.
Dans un paragraphe suivant, la navigation Liaison 16 sera décrite en détail, mais une première approche est nécessaire à ce stade. La navigation Liaison 16 est critique pour quelques plates-formes comme les avions de chasse, qui ne recevront pas de GPS[acro 55]. La fonction Navigation d'un terminal Liaison 16 met en œuvre un Filtre de Kalman qui utilise la réception des PPLIS provenant des terminaux des autres plates-formes du réseau pour positionner précisément sa propre plate-forme. Ce positionnement s'effectue en premier relativement aux positions reçues des autres plates-formes. A cette fin, la fonction Navigation du Terminal mesure le temps d'arrivée (TOA[acro 56]) de chacun des PPLI.
Puisque tous les terminaux ont une connaissance parfaite du tempo de chaque TimeSlot, la fonction Navigation du Terminal connaît avec précision le moment où le PPLI reçu a été transmis, ainsi elle détermine le TOA.
Puisque le message PPLI contient la localisation en trois dimensions du terminal émetteur, la fonction Navigation du Terminal récepteur peut obtenir une correction unidimensionnelle (le rayon d'un cercle) de sa position par rapport à l'autre participant de réseau.
Avec plusieurs de ces corrections, le filtre de Kalman effectue des prédictions de plus en plus précises qui comparées aux observations successives, permettent de positionner la plate-forme dans toutes les dimensions. Cependant, pour connaître avec précision le moment où le PPLI a été transmis, la fonction Navigation du Terminal doit tenir compte du mode de transmission du terminal émetteur.
La fonction Navigation du Terminal suppose que le terminal émetteur utilise le même mode de transmission que le sien. Donc, tous les terminaux fonctionnant dans un réseau doivent mettre en œuvre le même mode de transmission en distance (Range Mode - "NORMAL" ou "ÉTENDU"); sinon la navigation des terminaux sera erronée.
Changement de mode
Le mode de transmission en distance "NORMAL" ou "ÉTENDU" est choisi en phase de Conception de Réseaux (Design Phase). Il est transmis aux terminaux dans les paramètres d'initialisation. Certaines plates-formes permettent à l'opérateur de changer le mode de transmission. Cette capacité n'a été laissée que pour supporter un changement de réseau coordonné. Aucune plate-forme ne doit pas changer individuellement le mode de transmission (Range Mode) pour des besoins propres.
La portée radio
La capacité d'utiliser le mode de transmission "ÉTENDU" est limitée par la nécessité pour le récepteur d'être en portée radio (LOS : Line-of-sight (en)) de l'émetteur. La portée radio dépend de la courbure de la terre. Le mode de transmission utilisable est fonction des effets atmosphériques parce que l'atmosphère a tendance à courber le chemin des ondes hertziennes.
On estime que la portée maximum (R) d'une plate-forme aéroportée à une altitude en pieds (h) vers une plate-forme positionnée en surface en exprimée ainsi :

Le portée maximum entre deux plates-formes aéroportées est simplement la somme des portées maximums par rapport à la surface de la terre de chacune d'entre-elles. Par exemple, un AEW à 29 000 pieds serait en portée radio d'une plate-forme de surface jusqu'à environ 200 NM. Il pourrait échanger des informations avec un autre AEW à 29 000 pieds jusqu'à 375 NM. Donc la limite maximum de la portée "ÉTENDU" de 500 NM ne serait pas atteinte.
Les plates-formes positionnées à plus de 300 NM du cœur du réseau Liaison 16 doivent faire face à des difficultés de synchronisation et à des limitations en navigation lorsque le mode "ÉTENDU" est utilisé ; elles seront présentées en détail ultérieurement.
En raison de ces limitations et du fait que le mode "NORMAL" répond généralement aux besoins, les réseaux sont nominalement conçus en mode Range "NORMAL".
Mode de fonctionnement – Mode d'accès en transmission
Le Mode de Transmission dédié ou contention est défini NPG par NPG pendant la phase de conception du Réseau.
Mode de fonctionnement – Mode d'accès en transmission dédié (Dedicated Access)
Prenons l'exemple de l'attribution d'un bloc de TimeSlots propre à chaque Non-C2 pour la transmission de messages PPLIS. Dans un réseau de 4 Non-C2, l'attribution serait typiquement un bloc unique (TSB : Time Slot Block) de 4 TimeSlots par 12 secondes pour une émission toutes les 3 secondes d'intervalle. Chaque Non-C2 possède son propre TSB. L'attribution du TSB sera transmise dans les paramètres d'initialisation du terminal du Non-C2. Cette façon d'avoir d'attribuer les TSB en transmission est appelée "mode de transmission d'accès dédié". Il existe un autre mode de transmission en contention. Chacun de ces modes d'accès présente des avantages et des inconvénients.
Pour mettre en œuvre le mode d'accès dédié, chaque plate-forme doit utiliser un jeu de paramètres d'initialisation différent de celui des autres plates-formes, contenant des TSB propres à la plate-forme considérée.
Si, par accident, deux plates-formes L16 (JU) utilisent les mêmes paramètres d'initialisation, cela aboutira qu'elles transmettront en même temps dans les mêmes TimeSlots. Les impulsions de chaque transmission se propageront à partir des deux plates-formes.
Les terminaux en réception se synchroniseront sur le premier train d'impulsions reçues. Les impulsions de la seconde plate-forme plus éloignée, arrivant plus tard, ne seront pas calées sur les fréquences attendues par le récepteur, elles seront simplement filtrées. Nous sommes dans une configuration identique à celle obtenue lors de la réception d'impulsions d'une autre plate-forme travaillant sur un autre net.
En résumé, quand une ou plusieurs plates-formes transmettent dans le même TimeSlot sur le même Net, un terminal en réception ne recevra que les données de la plate-forme la plus proche. C'est le principe de capture qui est utilisé pour le mode de transmission d'accès en contention.
Mode de fonctionnement – Mode d'accès en transmission en contention (Contention Access)
L'alternative au mode de transmission dédié avec lequel un terminal peut avoir accès au réseau, est appelé le mode de transmission en contention. Dans ce mode d'accès, les participants se voient attribués un même Pool de TimeSlots.
Par exemple, pour le NPG PPLIs les 4 Non-C2 JUs pourraient se voir assigner un pool de bloc de 64 TimeSlots par 12 secondes.
Chaque participant se voit assigner un intervalle d'accès en transmission, qui représente le taux moyen auquel il peut en réalité transmettre son message PPLI.
Le terminal en transmission choisit aléatoirement son TimeSlot dans l'intervalle qui lui est alloué. Par exemple, les Non-C2s peuvent se voir assigner un intervalle d'accès de 1,5 seconde. Avec 64 TimeSlots par 12 secondes, Chaque Non-C2 utilisera 8 TimeSlots. Alors, toutes les 1,5 seconde, le terminal de transmission choisira aléatoirement, un des 8 TimeSlots pour une transmission. Le résultat est que plusieurs JUs Non-C2 peuvent utiliser le même TimeSlot.
On ne recommande pas d'utiliser l'accès en contention pour la transmission d'informations cruciales comme le message PPLI
Mode de fonctionnement – Mode d'accès en transmission – Dédié versus contention
Lorsque l'accès dédié est utilisé pour un NPG, chaque JU possède son propre jeu d'attribution de TimeSlots. Par exemple, sur le NPG "CONTROL" en accès dédié, chaque Non-C2 doit utiliser ses propres Time Slot Blocks en transmission.
Une raison de l'utilisation de l'accès en contention peut être la volonté d'une utilisation plus efficace de la capacité du réseau. Une illustration est le NPG Control en BackLink (Des Non-C2 vers le C2).
En Control BackLink, généralement, seul le leader de la patrouille est autorisé à transmettre. Il peut redescendre l'état d'engagement sur une cible toutes les 6 secondes. De temps en temps, il devra répondre à une assignation de mission. En accès dédié, l'allocation serait probablement de 4 TimeSlots par 12 secondes. Cela offre un intervalle de 3 secondes entre deux TimeSlots ce qui peut se traduire par un délai de 3 secondes pour la transmission de l'acceptation (WILCO) ou le refus (CANTCO) de la mission. Cela signifie que le contrôleur devrait attendre jusqu'à 3 secondes pour visualiser le compte-rendu.. Cette attribution de 4 TimeSlots par 12 secondes doit être faite à chaque Non-C2 sur le NPG Control puisque le rôle de leader peut changer en vol. Si l'on considère qu'un C2 peut contrôler jusqu'à 5 patrouilles de 4 avions, on obtient une capacité BackLink de 80 TimeSlots par 12 secondes.
Supposons qu'avec 5 patrouilles, nous prévoyons que 3 d'entre-elles peuvent engager simultanément. Ainsi, 3 leaders peuvent transmettre l'état d'une cible en utilisant chacun 2 TimeSlots par 12 secondes sur le BackLink. Supposons que nous assignons en BackLink 32 TimeSlots par 12 secondes avec un intervalle de 1,5 seconde. Cela aboutit à un accès identique à celui obtenu en mode dédié. (C'est-à-dire, une moyenne de 1,5 seconde avec 3 secondes dans le cas le plus défavorable).
Avec 3 avions de chasse engagés, la probabilité pour l'unité C2, de recevoir la réponse à un ordre d'engagement adressé à un quatrième leader, est d'environ 82%. Mais la réponse est automatiquement envoyée jusqu'à trois fois par le terminal, si l'unité C2 ne la reçoit pas ; cela augmente la probabilité de réception à plus de 99 %.
Donc la performance BackLink est en réalité tout à fait bonne avec moins de la moitié des TimeSlots exigés en mode dédié. Cela illustre que l'accès en contention est idéal lorsqu'il est appliqué à des NPGS dans lequel les participants ont à transmettre de manière aléatoire, des volumes de données faibles et exigeant un temps de réponse rapide. C'est particulièrement le cas pour les NPG "CONTROL" et "NonC2-to-NonC2".
Une autre raison d'utiliser le mode d'accès Contention réside dans le fait que le nombre d'unités pouvant opérer peut varier. Alors qu'un Pool de TimeSlots est taillé pour supporter un certain numéro de participants, il est important de pouvoir en augmenter le nombre sans que rien de catastrophique n'arrive. La performance des échanges en Contention se dégrade quelque peu. Par exemple, la probabilité de recevoir une réponse à un ordre baisserait un peu. En accès dédié, ce n'est pas le cas. Si tous les Paramètres d'initialisation prévus sont utilisés, l'arrivée d'une plate-forme supplémentaire ne peut se traduire que par la réutilisation d'un jeu de TSB déjà en fonction. Le principe de capture aboutit à un échange sérieusement compromis pour les deux plates-formes utilisant les mêmes jeux de TSB.
Deux raisons font que l'accès en contention n'est pas plus souvent utilisé
- La Liaison 16 partage sa bande radio avec la bande de radionavigation aéronautique. Les Administrations de l'Aviation Civile qui gèrent cette bande, ont placé des contraintes significatives pour une utilisation en temps de paix par les militaires
- En raison des transmissions multiples dans le même TimeSlot, l'accès en Contention peut mettre en péril la performance des moyens de navigation radio.
Aussi, il y a de nombreuses situations où il n'est pas permis d'utiliser le mode d'accès en Contention
Même quand l'administration de l'aviation civile permet l'utilisation du mode d'accès Contention, d'autres contraintes, en temps de paix, peuvent limiter son utilisation. Il s'agit essentiellement du nombre d'impulsions pouvant être émises par une plate-forme et par l'ensemble du réseau, que l'on appelle TSDF (TimeSlot Duty Factor)
Mode de fonctionnement – Limite d'Empaquetage (Packing Limit)
Il existe 4 possibilités d'empaqueter les symboles qui permettent de transmettre les messages Liaison 16. De l'empaquetage offrant le plus de sécurité de transmission à celui offrant la meilleure bande passante, ce sont :
- L'empaquetage "Standard Double Pulse" qui permet de transmettre 3 mots de 72 bits par TimeSlot
- L'empaquetage "Packed 2 Double Pulse" qui permet de transmettre 6 mots de 72 bits par TimeSlot
- L'empaquetage "Packed 2 Simple Pulse" qui permet de transmettre 6 mots de 72 bits par TimeSlot
- L'empaquetage "Packed 4 Simple Pulse" qui permet de transmettre 12 mots de 72 bits par TimeSlot
La limite d'empaquetage (Packing Limit) est définie en phase Design du réseau Liaison 16 pour chaque groupe de participation de réseau (NPG). "Packing Limit" signifie que le terminal peut dégrader l'empaquetage jusqu'à la limite fixée, mais chaque fois que la possibilité de transmettre dans un "Packing" de meilleure résistance au brouillage se présentera, ce dernier sera utilisé. Autrement dit, si la limite de "Packing" est "Packed 4 Simple Pulse", le terminal pourra émettre dans un des trois autres empaquetages, s'il en a la possibilité.
La différence entre l'empaquetage "Standard Double Pulse" et l'empaquetage "Packed 2 Simple Pulse" est que dans le premier cas, chaque symbole est transmis deux fois au lieu d'une, pour l'empaquetage "Simple Pulse".
Dans l'empaquetage "Packed Simple Pulse", Il y a donc seulement une impulsion au lieu de 2.
En conséquence, dans un TimeSlot, 6 mots peuvent être transmis au lieu de 3.
Dans les empaquetages "Packed 2 Double Pulse" et "Packed 4 Simple Pulse", le nombre d'impulsions par TimeSlot, est augmenté (444 impulsions au lieu de 258) au détriment de la portée radio et du "Jitter".
Prenons le leader d'une patrouille de 5 Avions de chasse. Sur son écran principal, il voit sa propre plate-forme (Ownship) située au centre et les quatre membres de la patrouille, généralement présentés chacun par un cercle avec le numéro de leur position dans la patrouille au centre. L'échange des messages PPLIS entre les avions de chasse, permet ainsi de présenter une image où l'on peut situer chaque équipier d'un simple coup d'œil. Cela n'est vraiment efficace que si la navigation est précise. Cette navigation précise est basée sur la navigation du porteur (Ownship) elle-même basée sur l'échange de messages PPLIs entre les avions de la patrouille. L'échange de messages PPLIS fiables exige que la navigation des avions soit précise.
La précision de la navigation est également essentielle pour l'échange des détections radar au sein de la patrouille. Chaque avion localise une détection précisément par rapport à lui même (Ownship). Cependant, si deux avions cumulent des erreurs de navigation, ces erreurs se retrouvent dans les messages reportant la position absolue de la cible. La conséquence est l'impossibilité de fusionner les détections au sein de la patrouille et le C2 contrôleur reportera deux pistes au lieu d'une seule.
Pour établir s'il y a deux cibles ou une seule, chaque avion utilisera des algorithmes de corrélation des cibles qui seront basés, en partie, sur l'écart de distance séparant les positions cibles échangées c'est la fenêtre de corrélation. Si l'erreur de navigation est grande, la fenêtre de corrélation peut être agrandie de sorte qu'une seule entité sera interprétée correctement. Cependant, une grande fenêtre de corrélation peut mener à la corrélation de deux cibles espacées, chacune étant vue par un avion différent. De telles erreurs de corrélations peuvent entraîner des surprises désagréables particulièrement lorsque des AMIs sont proches d'HOSTILEs. Ainsi, une navigation imprécise entraîne un faible capacité de corréler correctement.
Si malheureusement, le système inertiel de navigation (INS) de l'Avion de chasse possède un taux de dérive significatif par rapport aux besoins de la Liaison 16 (par exemple, environ 0.7 nm/hr pour les F-15Cs), l'alignement INS étant effectué bien avant le décollage, une dérive importante peut être observée avant que les avions ne décollent. Heureusement, les terminaux de la liaison 16 offrent une capacité de navigation relative.
Le besoin d'une navigation porteur précise est aussi très important pour les plates-formes C2 chargées de la surveillance, qui poursuivent les pistes par rapport à leurs propres positions ; l'erreur de navigation de la plate-forme venant s'ajouter celle du senseur détection lors de la diffusion des pistes sur le NPG Surveillance de la Liaison 16. Cependant, aujourd'hui, ces plates-formes sont équipées de GPS.
Remarques et résumé
La navigation Géodésique s'effectue en partie par la mesure des TOA (Time Of Arrival). Dans un réseau, tous les terminaux doivent utiliser le même mode de fonctionnement en distance (Range Mode), sinon les mesures de TOA amèneront à des calculs de distance erronés.
Une autre partie de la Navigation Géodésique s'effectue grâce aux informations de position et horaire, échangées. Une Navigation géodésique efficace exige des sources externes et locales, offrant une qualité de position (Pq) et une qualité de temps (Tq) qui sont excellentes.
Description détaillée
Il existe deux modes de navigation Liaison 16. Tous les deux sont décrits dans cette section. Cependant, nous prendrons quelques libertés dans les descriptions afin de préserver la simplicité de la présentation. Cette description simplifiée, doit permettre de comprendre le fonctionnement de la navigation. Le premier des deux modes est la navigation géodésique.
Exemple :
Prenons l'exemple d'un avion en vol qui reçoit les messages PPLI de deux plates-formes Terre (Land) La fonction navigation prend en compte les données de position et de vitesse, fournies, par exemple, toutes les 50 millisecondes au terminal par l'INS (Inertial Navigation System). Le terminal contient le modèle mathématique de la dynamique avion. Après l'alignement de la centrale inertielle de navigation[trad 35] (INS), le terminal prend la première position reçue de l'INS comme position initiale et commence à utiliser les données "vitesse" pour estimer la position de l'avion via le modèle.Par la suite, le terminal détermine l'écart entre la position fournie par la centrale inertielle de navigation[trad 35] et celle de son évaluation propre et transmet au processeur de vol les corrections toutes les 50 millisecondes. Le Terminal MIDS diffuse cette position estimée et la vitesse dans son message PPLI. La position transmise tient compte de la dérive INS pour déterminer la qualité de position (Pq) d'une manière semblable à la qualité de temps (Tq).
Dans cet exemple, lorsque l'avion entre dans le réseau, il reçoit les messages PPLIs des deux plates-formes LAND qui transmettent également leur position et leur Pq. Chaque site LAND fournit une qualité de position maximum (Pq=15) car la position est fixe et parfaitement connue.
Lorsque le terminal de l'avion reçoit un message PPLI, il mesure le temps d'arrivée[trad 36] (TOA) dans l'heure réseau. La fonction navigation du terminal connaît le TimeSlot d'émission du message PPLI et, à partir du TOA mesuré, calcule la durée théorique de propagation depuis la source. Cela fournit une évaluation de la distance séparant le Terminal émetteur du Terminal récepteur.
- Le terminal récepteur détermine le TOA théorique à partir de la distance le séparant du Terminal émetteur en prenant en compte la position reçue dans le message PPLI.
- La comparaison entre le TOA mesuré et le TOA théorique, permet de calculer une erreur en distance. le terminal MIDS ajuste sa position estimée afin de réduire cette erreur si et seulement si, la qualité de Position (Pq) de la source est meilleure que la sienne.
- Ce calcul est effectué successivement pour chaque PPLI reçu, ce qui permet d'améliorer et d'entretenir l'estimation de l'erreur de position.
Pendant la réception des messages PPLIS et le traitement de leur TOA, le modèle du terminal continue à utiliser la vitesse fournie par la centrale inertielle pour extrapoler la position de l'avion. Cependant, il y a des erreurs d'évaluation en distance. Elles dépendent de la qualité de Position de la source (Pq) et de la capacité du terminal à déterminer ses erreurs. La qualité de l'évaluation de l'erreur en distance dépend de la capacité du terminal récepteur à mesurer le TOA et de la capacité des terminaux source et récepteurs à connaître avec précision l'heure réseau (c'est-à-dire, leur Tqs).
La fonction navigation du terminal effectue ses corrections de position en se basant sur la position reçue et la qualité de temps[trad 37] associée dans chaque message PPLI. Si la qualité de position[trad 38] (Pq) et la qualité de Temps (Tq) reçues sont excellentes et que la propre qualité de position (Pq) est faible, la correction prendra en compte une grande partie de l'erreur calculée. À l'inverse, si les Qp et TQ reçues sont faibles, la correction appliquée, peut être faible. Donc, une navigation géodésique efficace, exige de recevoir des messages PPLI avec des qualités de position (Pq) et de temps (Tq) excellentes.
Articles connexes
- Liaisons de Données Tactiques
- Liaison 4
- Liaison 11
- Liaison 22
- JICO
- Naval Tactical Data System
- Network Centric Warfare
- Appui aérien rapproché
- Global Information Grid
Traductions de
- Tactical Data Link
- (en) Multi TDL
- (en)If you are not Link 16 capable, you will not be welcomed in the US battlefield and in fact, you will be considered a blue on blue engagement generator - a threat to friendly and coalition forces. Vice Admiral Arthur Cebrowski, USN, Joint Chief Of Staff, J6
- En-Tête : Header, en Liaison 16 chaque message est précédé d'un Header
- Seamless
- Secretary of State for Defence, Dr Liam Fox, said:"This was the first operational mission flown by British Army Apaches at sea".
- (en)
 weapon-fly out information
weapon-fly out information - (en) "Joint Standoff Weapons"
- (en) Using the Link 16 Network Enabled Weapon software, messages were exchanged regarding targeting, command and control, identification and weapon-fly out information. During three days of testing, Joint STARS successfully completed 13 runs with two Navy F/A-18 Hornets, two Joint Standoff Weapons and two instrumented target ships
- Limited Production 2 (LP 2) Acquisition Decision Memorandum (ADM)
- Frequency Remapping included
- Frequency Remap under development
- Cryptographic Modernization (Crypto Mod)
- Enhanced Throughput (ET)
- Dynamic Network Management (DNM)
- Concurrent Multi-Netting (CMN)
- Frequency Remapping (FR)
- Net empilés : Stacked Nets
- (en) Dynamic Network Management (DNM) increases Link 16 network effectiveness and throughput and provides the warfighter greater flexibility in the use of the Link 16 network
- (en) DNM will facilitate automated net entry/exit of additional platforms
- (en) DNM will provide a real-time capability to adjust Link 16 network allocation to meet evolving network changes in the theater
- (en) DNM reduces Link 16 network oversubscription and will enable fully ad-hoc, dynamic network operations on Link 16, variable update and throughput rates, and expanded network throughput with sub-net operations
- (en) DNM also provides support for networked weapons, sensor networking, time-critical targeting, and time-critical strike
- (en) DNM includes the following capabilities: Time Slot Reallocation (TSR), TSR Combined Network Participation Groups (CNPG), expanded stacked netting and Multi-netting
- Empaquetage : Packing
- (en) EMERGENCY
- (en) Bail out
- (en) Ditching
- Force Tell
- (en) Homme à la mer : Man in Water
- (en) Ejection : Bail out
- (en)Navire en détresse : Distressed Vessel
- (en) Operationnal Contingency Constraints
- traduction de Hooked : saisie
- Inertial Navigation System(INS)
- Time Of Arrival (TOA)
- Time Quality (TQ)
- Position Quality (Pq)
Acronymes
- Standard NATO Agreement
- ADatP : Allied DATa processing Publication
- JMTOP : Joint Multi-TADIL Operating Procedures
- (en) C2 : Command and control
- TTNT: Tactical Targeting Network Technology
- Combined Air Operations Center
- HAP : Hélicoptère d’Appui et de Protection
- RETEX : RETour d'EXpérience
- (en)PPLI : Precise Participant Location and Identification
- RESCO : Recherche et Sauvetage de Combat
- ALAT : Aviation Légère de l'Armée de Terre
- ETO : Étude Technico-Opérationnelle
- (en) NORGIL : NORwegian Ground Infrastructure for Link 16
- (en) RADAR : RAdio Detection And Ranging
- (en) SONAR : SOund Navigation And Ranging
- SIA : SIGINT Identification Authority
- AWACS : Airborne Warning and Control System
- CARS : C=CAOC Combined Air Operations Center ; A=ACR Air Control Center :R=RAP production Center ;S=SFP Sensor Production Center
- ACCS : Air Command and Control System
- Sol Air Moyenne Portée/Terre
- MMA : Multimission Maritime Aircraft
- MARTHA : maillage des radars tactiques contres les hélicoptères et les aéronefs à voilure fixe)
- Hélicoptère de manœuvre poste de commandement
- COMAO : Composite Air Operation
- SAMP/ Sol Air Moyenne Portée
- BEM: Bulletin des Études de la Marine
- MALE : Moyenne Altitude Longue Endurance
- SA2R Surveillance, Acquisition d'objectif, Reconnaissance et Renseignement
- JSTAR : Joint Surveillance Target Attack Radar System
- LVT: Low Volume Terminal
- TACAN : TACtical Air Navigation
- (en)JREAP : Joint Range Extension Applications Protocol
- (en)JDAM : Joint Direct Attack Munitions
- (en) NGC2P/CDLMS : Next Generation Command and Control System/Common Data Link Management System
- UFH : Ultra haute fréquence
- SMTT : Small Tactical Terminal
- (en) DME : Distance Measuring Equipment
- (en) VOR : VHF Omnidirectional Range
- (en) ILS : Instrument Landing System
- DoD : Department of Defense
- DoT : Deparment of Transportation
- TDMA : Time Division Multiple Access
- (en) TACP-M : Tactical Air Control Party Modernization
- (en) VMF : Variable Message Format
- SITREP : SITuation REPort
- Combat Information Center
- AIS = Automatic Identification System
- RTB: Return To Base
- (en) COP : Common Operational Picture
- CSAR : Combat Search And Rescue
- FLIR = Forward looking infrared
- ISR : Information, Surveillance, Recconaissance
- OODA : Observe, Oriente, Decide, Act
- (en) ETR = External Time reference
- GPS : Global Positioning System
- TOA : Time Of Arrival
Notes et références
- Aero defense
- (en) Interoperability: A Continuing Challenge in Coalition Air Operations ; Chapitre 7, AIR SURVEILLANCE AND CONTROL Page 82 "...there is also a need to define and follow standard operating procedures, e.g., the Joint Maritime Tactical Operating Procedures for Link 16 operations, now known as the Joint Multi-TADIL Operating Procedures"
- (en) [PDF] - 2000 - Tadil-J
- l'amiral Arthur K.Cebrowski
- (en) STATEMENT OF VICE ADMIRAL A. K. CEBROWSKI DIRECTOR, SPACE, INFORMATION WARFARE, COMMAND AND CONTROL CHIEF OF NAVAL OPERATIONS
- (en) [PDF] Command in Air War - Centralized versus Decentralized -Control of Combat Airpower"
- (fr)
 Soutien des opérations : le rôle-clé des “systèmes de systèmes”. Gérer la complexité et la sécurité. Par le Général (2S) Jean-Patrick Gaviard
Soutien des opérations : le rôle-clé des “systèmes de systèmes”. Gérer la complexité et la sécurité. Par le Général (2S) Jean-Patrick Gaviard - (en)
 [PDF] CENTRALIZED COMMAND – DECENTRALIZED EXECUTION: IMPLICATIONS OF OPERATING IN A NETWORK CENTRIC WARFARE ENVIRONMENT
[PDF] CENTRALIZED COMMAND – DECENTRALIZED EXECUTION: IMPLICATIONS OF OPERATING IN A NETWORK CENTRIC WARFARE ENVIRONMENT - (en)
 LE COMMANDEMENT ET LA GUERRE RÉSEAU CENTRIQUE, Revue militaire canadienne - Été 2001
LE COMMANDEMENT ET LA GUERRE RÉSEAU CENTRIQUE, Revue militaire canadienne - Été 2001 - (en) [PDF] Network-Centric Operations Case Study Air-to-Air Combat With and Without Link 16
- Voir le site du JRE
- (en)USAF tests internet capability over Link 16
- (fr) [PDF] Cf. Journal AirSpace Power AVIATEURS DU CHAMP DE BATAILLE Page 75 : "d’ici l’exercice,financier 2020, nous prévoyons d’élargir le réseau Liaison 16, puis de le faire évoluer grâce à une série de liens améliorés pour qu’il forme un robuste réseau IP embarqué"
- (en) Site DARPA sur le TTNT
- (en) - 19 decembre 2008 - Work Begins On Advanced Datalink For F-22
- (en) - 15 avril 2009 - USAF selects datalink to bridge communications gap between F-22 and F-35
- (en) - juin 2009 - Air power for Hybrid Warfare - Description de l'utilisation du MADL page 23 (page 25 du fichier pdf)
- Tadil-J : fixed word format message. A TADIL J message utilizing FWF. An FWF message is started by an initial word which may then be followed by one or more extension and/or continuation words
- article du journal "Le monde"
- Magazine Raids - numéro Hors-série consacré aux "Ailes françaises au combat. 1994-2009", Jean-Marc Tanguy
- (fr) RAFALE sur Avions militaires.net
- (fr) Paris engage des Rafale en Afghanistan 27/10/2007
- Reachback (en) : Ce terme est utilisé par le Ministère de la défense américain (DoD) comme étant un processus d'obtention de produits, de services, d'applications, de forces, d'équipement, ou d'information provenant d'organisations qui ne sont pas déployées. La liaison en Reachback est le moyen de déclencher ce processus
- (fr) Le Parisien (site)
- Conférence de Presse du 20 mars 2011 (17h30)- État major des armées - M. Laurent TESSEIRE, Colonel Thierry BURKHARD
- (fr) Le Marin : 03 juin 2011 "Le troisième œil de la Marine
- (fr)Le mamouth : L'aviation française continue son carton
- (en) 1 Greek Radar Aircraft for operation against Lybia
- (grc)
 Le rôle de la Grèce dans une possible intervention en Libye
Le rôle de la Grèce dans une possible intervention en Libye - (fr)le rôle du Hawkeye dans l’opération Harmattan
- (en) MADL not ready
- (en) Missing Weapon of Operation Odyssey Dawn
- (en) U.S. non-participation was explained F-22 military operations in Libya
- (en) [PDF] Information Dominance Industry Day Questions and Answers 32. Since Link 16 is going to be around for a long time, is the Navy going to invest in improvements to the datalink? Navy has invested in near term improvements to Link 16 that include Cryptographic Modernization, Frequency Remapping, Dynamic Network Management and Enhanced Throughput. Navy, along with Air Force, is developing a longer term strategy to increase the capacity of Link 16 through improvements like Concurrent Multi-Netting/Concurrent Contention Receive and/or offloading future requirements that would further burden the Link 16 network to an Advanced Tactical Data Link network.
- Training On Tiger (Juin 2008) Both countries’ Tigers will also receive the Sagem SATEL integral communications and navigation system, which will house a Link-16 compatible Multifunctional Information Distribution System (MIDS) allowing the helicopters to share information with other Link-16 equipped aircraft, a vitally important addition for when the Tigers participate in NATO exercises and operations
- (fr)
 Premières frappes d’hélicoptères de l'otan
Premières frappes d’hélicoptères de l'otan - (en)
 APACHE lacks Digital environment
APACHE lacks Digital environment - SECRET DEFENSE : L'emploi des hélicoptères de combat a été un facteur militaire déterminant dans la campagne.
- (en) Aviation Week: French army and navy operate in closest collaboration yet
- (en) Apaches conduct operations over Libya
- (en) RAF operations today and in the future Monday, 02 May 2011 Robin Ashby By Air Vice Marshal Baz North, Assistant Chief of the Air Staff Later, using its Moving Target Indicator capability, the Sentinel identified vehicle movement in the vicinity of a pump station. This position was passed via data link to the US JSTARs platform which cross correlated movement in the same area. The mission/target data was then passed via Link 16 to the Typhoons on combat air patrol and thence to the GR4s operating in the area which prosecuted the attack. It has become the norm for each GR4 to take on 4 to 6 targets, each of which has been positively identified and crosschecked against the Rules Of Engagement.
- (en) LM AMF JTRS Team Delivers Radio to Apache AH-64D
- (en) Lockheed Martin delivers Joint Tactical Radio for AH-64D integration
- (fr) Secret Defense "From the sea"
- (fr) Revue d’information de l’ALAT n°21 ETO (1) LIAISON 16 SUR COUGAR "Le groupement « aéromobilité » de la section technique de l’armée de terre (GAMSTAT) de VALENCE-CHABEUIL et la Direction Générale de l’Armement - Essais en Vol (DGAEV) d’ISTRES mènent depuis 2008 une étude en commun dans le but d’évaluer l’intérêt de la liaison 16 dans l’emploi des hélicoptères de combat"
- (fr) Le transfert des informations vers le « monde » L16 sera rendu possible par le développement d’une passerelle logicielle entre la messagerie H (du SITALAT) et la messagerie J (de la liaison 16, STANAG 5516)
- (en) [PDF] Sea Power July 2011 - page 34 WorkHorses of the sea
- (en) [PDF]MH-60S Multi-Mission Combat Support Helicopter
- (en) [PDF] Multi-Mission MH-60 SEAHAWK® Helicopter - Serving the US Navy Worldwide
- Ministère de la défense : Arrivée des atlantique 2 à la Sude
- (en) The Wonders of Link 16 For Less: MIDS-LVTs
- (en) DLS MIDS-LVT Terminal to Provide Coalition Forces Real-time Situational Awareness
- (en)
 Site Embraer
Site Embraer - (fr) Ambassade de France à Athènes : Essais d’interopérabilité franco-grecs « Rafale » et « Erieye »
- (en) Article "Flight Global International" du 16 février 2009
- (en) "Boeing Supplier Turkish Aerospace Industries Completes 1st In-Country Modification of Peace Eagle AEW&C Aircraft", Boeing, 4 June 2008.
- (en) Australia takes delivery of Wedgetails
- (fr) Article DSI : La Royal Australian Air Force au défi de l’Asie
- (en) USA details possible $2.6 billion deal with Moroccan air force
- (en)US Radar Sites Iceland
- (en) Iceland Air Defense system
- (en) NORGIL
- (fr) [PDF] Communiqué Marine Nationale : Liaison 16 et satellite
- (fr) LA POLYVALENCE DU RAFALE
- (fr) Centre de Détection et de Contrôle-Déployable (CDC-D) : un moyen unique
- ACCS
- (fr) Dans l'armée de l'air, Mamba va pouvoir mordre
- (fr) Col Bleu : "Un équipage du tonnerre"
- (fr) [PDF] Site DGA Frégates multi-missions, voir : Système de communications
- (fr) Cf. Net Marine : Patrouille maritime : Le programme de rénovation des Atlantique 2
- (en) United states Navy "Fact Files"
- (fr) 20px Four ATR72MP to replace the ageing Italian fleet of Br.1150 Atlantic
- (fr) Cf. Net marine Royal Navy La Grande-Bretagne sans patrouille maritime pendant deux ans ?
- (fr) Mer et Marine
- (fr) Mer et Marine : Le programme de rénovation des Atlantique 2
- (fr) [PDF] La défense sol-air (DSA) sous le signe de la dualité
- paragraphe "NC1 / MARTHA" de l'article 57e régiment d'artillerie
- (fr) NAWAS 2010 - Site du Premier Ministre
- DOCTRINE N° 14 - JANVIER 2008 page 34
- (fr) Arti, le magazine de l'artillerie, n°15 - France - 2010
- site du 402e régiment d'artillerie
- (fr) [PDF] Bulletin d’études de la Marine N° 46 d'Octobre 2009, page 106
- (fr) Systèmes d’Information Géographique embarqués dans les hélicoptères - Interview du Sous-Lieutenant Philippe Lépinard Le Système d’Information Terminal de l’ALAT (SITALAT) est le plus récent de ces systèmes embaqués et correspond au dernier maillon de la future chaine numérisée de l’ALAT (NumALAT) en s’intégrant dans une Liaison de Données Tactiques (LDT) qui permet aux différents systèmes d’arme d'avoir accès à des voies de communication normalisées fournissant des flux d'informations en temps réel. La société DIGINEXT s’est vue confier en novembre 2007 la réalisation d’une LDT capable de véhiculer les informations exploitées par le SITALAT via les réseaux radio de type Time Division Multiple Access 5. Baptisée Messagerie H, elle reprend globalement les mêmes propriétés que la Messagerie J de la Liaison 16 (LDT OTAN), c'est-à-dire des services d’échange d’informations. DIGINEXT doit également développer un traducteur entre les messageries H et J afin que l’ALAT puisse au final s’intégrer dans une manœuvre internationale
- (fr) Air&Cosmos N°2189 du 9 octobre 2009 page 61
- Air Actualités, le magazine de l'armée de l'air n°633 page 8
- (fr) Description COMAO
- il ne faut pas confondre cette définition du HIT avec celle de l'instruction CJCSI 3151.01B du Chief of staff US : high interest tracks -- High interest tracks, designated by the joint force commander or above, are significant or carry significant information. Examples are use of a unique weapon system, VIP tracks, or special missions. Size of the track does not matter in determining its interest value.
- (en) RAFALE in Combat On y remarque cependant : Data from all on-board and off-board sensors are combined into a single tactical picture En fait, l'intégration des détections des Non-C2 avec l'image tactique est de la responsabilité des C2 et les Non-C2 y ont un total accès.
- (fr)- 2009 - Air Power Automne 2009 - Changer l’idéologie de soutien de l’U.S. Air Force pour exploiter les armes combinées dans le combat rapproché par le lieutenant colonel Collin T. Ireton, (page 29) USAF et L’appui aérien asymétrique par le commandant Gary L. Burg, U.S. Air Force (page 65
- (en) [PDF] Command and Control for Joint Air Operations On remarquera dans ce document que pour la COMAO, si le rôle du JFACC est clairement établi, celui de la plate-forme C2 éventuelle, est plus flou
- (fr) [PDF] Rapport d'exécution 2006 de la loi de programmation militaire 2003-2008
- (fr) [PDF] livre blanc de la défense nationale
- (fr) Projet de loi relatif à la programmation militaire pour les années 2009 à 2014
- (en) Site MRTT EADS à titre d'exemple le MRTT australien équipé de la liaison 16
- (fr) [PDF] Dossier de Presse DGA Salon du Bourget 2009
- (fr)décembre 2009 RAPPORT D’INFORMATION DÉPOSÉ PAR LA COMMISSION DE LA DÉFENSE NATIONALE ET DES FORCES ARMÉES sur les drones ET PRÉSENTÉ PAR MM. Yves VANDEWALLE et Jean-Claude VIOLLET, Députés voir le paragraphe Charge utile
- (fr) LES BESOINS DE LA MARINE EN DRONES AÉRIENS
- (en) Joint STARS demonstrates key network-enabled weapons capability
- JTIDS
- (en)JTIDS Technical Paper SyntheSys Systems
- MIDS
- (en)MIDS LVT1
- (en) [PDF] http://www.viasat.com/files/assets/MIDS_LVT1_Mobile_System_datasheet_006.pdf
- (en)[PDF]MIDS LVT2
- (en)FDL
- (en)MIDS FAQ
- (en)MILITARY INFORMATION TECHNOLOGY VOLUME 14, ISSUE 4 MAY 2010 JTRS for Joint War Fighting - page 18/40
- (en) [PDF]Présentation MIDS JTRS du 05/04/2011 page 17
- (en) [PDF]Geo Intelligence July/August 201 page 12
- (en)Northrop Grumman Awarded Air Force Contract to Integrate CLIP on B-1B and B-52 Aircraft
- (en) Contract extension puts communication system on U.S. bombers
- (en) [PDF]MIDS JTRS DLS
- (en)Multifunction Terminals Set for Takeoff
- (en) JPEO JTRS
- (en) [PDF]Military Information Technologie June 2011 - page 13 Multifunction Terminals Set for Takeoff
- (en)MIDS on Ship
- (en)U.S. Navy radio terminals get upgrade
- (en) TESTED FOR TACTICAL COMMS Navy Completes Evaluation of Next Generation of Tactical Data Links, Clearing the Way for Production
- (en)[PDF]STT Data Sheet
- (en)[PDF]STT
- MIL-STD-188
- (en)Small Tactical Terminal (STT) Applications/ConOps
- >(en)Small Tactical Terminal (UHF Line of Sight (LOS)/Link-16 STT Transceivers)
- (en)govcomm.harris.com
- (en)Naval Forces' Capability for Theater Missile Defense (2001) Chapitre "B.2.6 Link 16 Missile and Tactical Terminal/TacLink Weapons"
- (en) ViaSat developed high-quality/low-data rate voice, integrating Link 16 with INS and GPS navigation data and the concept for a very small, low-cost missile/tactical terminal.
- (en)[PDF] Small Adaptable Form Factor Terminal
- (fr) Défense et Sécurité Internationale
- (fr) Site DGA 17/12/2010 : La DGA lance les études du futur poste radio tactique interarmées
- (fr)[PDF][ http://www.assemblee-nationale.fr/13/pdf/budget/plf2011/a2862-tvii.pdf Avis de la commission de la défense nationale et des forces armées sur le projet de loi de finances 2011 N°2824 Page 244 ]
- (en)Hypres, ViaSat, SPAWAR Systems Center Pacific debut first all-digital multi-net Link-16 receiver
- (en) LINK-16 SPECTRUM DECONFLICTION
- (en) Spectrum Alert Déjà Vu - The 15-Year JTIDS Delay
- (en) Link-16 Network Enhancements REQUEST FOR INFORMATION Frequency remapping is required by a Memorandum of Agreement (MOA) between Department of Defense (DOD) and Department of Transportation (DOT) regarding the 960-1215 MHz frequency band. Frequency remapping algorithm is as defined in DoD 4650.1- R1, Link 16 EMC Feature Certification process and Requirements, App 2,
- (en) {pdf} Frequency Clearance Agreement
- (en) Joint Program Executive Office Joint Tactical Radio System MIDS Program Update
- (en) 4.3.17 Plan for JTIDS TDMA Waveform Systems
- (en)[PDF]ICD for JTIDS DDG-69 Shipboard Antenna
- (en)[PDF]ANTENNA CHARACTERISTICS Link 16 ANTENNA CHARACTERISTICS
- (en)
 Multifunctional Submarine Antenn
Multifunctional Submarine Antenn - (en) [PDF] NAVAIR : High Power Tunable Agile Notch Filter
- (en)[PDF]L5992 (LINK-16) MIDS/ARC-210
- (en) HGV-8
- (en) Voir sur Wikipedia en anglaisCryptographic Modernization Program
- (en) Modernization Program
- (en) Budget DoD 2011 page 8/27
- (en) Joint Tactical Data Enterprise Services (TDES) Migration Plan (JTMP)
- (fr) [doc] PLR 2007 - extrait du Rapport annuel des Performances de la mission : Défense. Version du 02/01/2009
- (en) Center team works to connect new fighters, bomber
- (en) Appel d'offre - Messagerie MADL
- (en) Is a Lack of Secure Comms Keeping the F-22 Out of Libya Fight?
- (en) Northrop Grumman Airborne Communications System Wins Award for Outstanding Industry Achievement
- SPAWAR de San Diego
- (en) [PDF] SHUMA
- (en) Appel d'offre du SPAWAR du 22/10/2008
- Exhibit R-2, RDT&E Budget Item Justification: PB 2011 Navy Technical: Link 16 Network Enhanced Throughput development has been removed from this budget.
- (en) [PDF]Navy Program Guide 2010, Page 124
- (fr) [PDF] Puissance aérospatiale et sécurité au XXIème siècle voir page 48 & 1.4.2 – Le counterland
- (fr) Projet de loi de finances pour 2009 : Défense - équipement des forces voir : B. FRAPPER À DISTANCE, 1. Le programme Rafale : une polyvalence renforcée en 2008]
- (en) Air Force Advance
- INTEGRATING THE B-2 INTO LINK 16 OPERATIONS Radio Silent : page 17 : In order to prevent this, the AWACS will need to manually send the engagement status message to the CAOC when it knows the B-2 is in radio silent mode. The B-2 cannot reply with a WILCO while maintaining radio silence, either,
- data mile
- (fr)Porte-avions Charles de Gaulle : Le Central Opérations
- E-2 Hawkeye : Design
- voir paragraphe "Programme E2-D Advanced Hawkeye" de l'article E-2D
- Upgrade for NATO AWACS
- voir wiktionary
- Repris du site wikipedia russe
- Exemple en temps réel d'une situation AIS
- Exploiting the Network to Empower the Warfighter: How do we Accelerate FORCEnet Pages 10-12
- Sonobuoy
- voir APP-6A
- (en) [PDF] Battle Force Interoperability (BFI) Operation Advisory Group (OAG)Voir planches 9 à 13
- Concepts of data/information fusion for naval C2 and airborne ISR platforms
- Senate Hearing, 1988, p. 10; Fogarty, 1988, pp. 29-30)
- (en) [PDF] Voir the Vincennes Case Study
- (en) [PDF]L'étude de ce drame n'est pas si simple, des erreurs humaines ont participé à la succession d'erreurs. Le lecteur intéressé peut se reporter à la thèse intitulée SYSTEMATIC ANALYSIS OF COMPLEX DYNAMIC SYSTEMS: THE CASE OF THE USS VINCENNES
- Electronic Warfare
- (en) [PDF] INCREASING TIME SENSITIVE TARGETING (TST) EFFICIENCY THROUGH HIGHLY INTEGRATED C2ISR
- Air Actualité Mai 2007 page 47 "Le RENS au sol et en l'air"
- SIGINT anglais
- ELINT en anglais
- COMINT en anglais
- OODA Loop
- (en) [PDF] Air Force Magazine : The goal is to put weapons on time sensitive targets in “single-digit” minutes.
- CONOPS
- (fr) Air et Cosmos 2196 du 27 novembre 2009 : "Seuls avions d’écoute électronique (Sigint) français, les deux C160 Transall Gabriel devraient quitter le service en 2020. Pour en préparer la succession, la DGA a attribué à Thales un important volet d’études avec le PEA « Matrice » pour réfléchir aux solutions techniques qui pourraient être adoptées sur la prochaine génération d’avions Sigint."
- (fr) Voir dernier paragraphe de l'article consacré au MPA de Bombardier qui est équipé du système AMASCOS de THALES
- (fr) [PDF] Lettre Guerrelec 2000 voir "Guerre électronique et renseignement : deux atouts maîtres pour l’Armée de l’Air"
- (fr). [PDF] BEM_46_AeroNavale_Marins du ciel_Part2 Drones, concept et mode d’emploi - Capitaine de frégate Rémi de Monteville - Affecté au collège des OCEM (officier correspondant d’état-major) à l’état-major de la Marine, au sein du système de forces CMI (commandement et maîtrise de l’information) et chargé du dossier drones Capitaine de corvette Marc Grozel Officier programme drone, expert drone à l’état-major de la Marine
- (en) [PDF]Link 16 Aided Moving Target Engagement
- (en) Precise Time Transfer Concepts
- (en)[PDF]- 2001 -Real Time exchanges of Tactical Data
- (en)[PDF]- 2000 -TADIL J guide
- (en)[PDF]- 2007 - MACE31501 Aircraft Group Design Lecture 3: Airborne Systems Pages 15-37
- (en)[PDF]- février 2004 -Tactical Data Link Systems and the Australian Defence Force (ADF) Technology Developments and Interoperability Issues
- (fr) [PDF]- janvier 2008 -La Marine et la gestion de l'espace 3D
- (en)[PDF]- 2007 -JAPCC Roadmap for Air C4ISR in NATO
- (en)[doc]- 8 août 2002 -Tactical Digital Information Link-Technical Advice and Lexicon for Enabling Simulation
- (en)[PDF]- 2005 -SINGLE AIR PICTURE
- (en)- 23 avril 2006 -Recent Developments in Aircraft Wireless Networks
- (fr)- 2006 -Aviateurs du champ de bataille Intégration des moyens de combat en soutien des forces d’opérations spéciales par le général de corps d’armée aérienne William Thomas « Tom » Hobbins Site Internet Air & Space Power Journal en français
- (en)[PDF]- février 2009 -Air Power in afghanistan
- (en)[PDF]- juillet 1997-Electronician Volume 3 - Communications
- (en)[PDF]- 2003 -Navigation Using LINK-16 GPS-INS Integration
Catégories :- Normalisation OTAN
- Télécommunications gouvernementales
























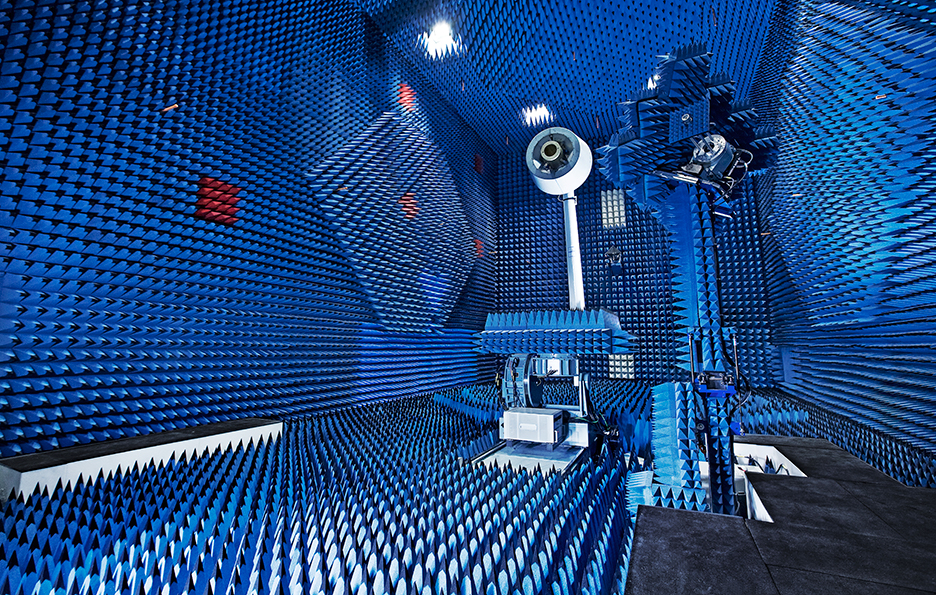



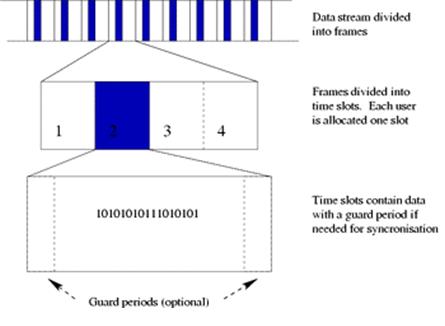























{kind=link}
Wikimedia Foundation. 2010.