- Integrale multiple
-
Intégrale multiple
 Intégrale simple comme superficie délimitée par une courbe, deux droites x = a et x = b, et l'axe des abscisses.
Intégrale simple comme superficie délimitée par une courbe, deux droites x = a et x = b, et l'axe des abscisses.
 Intégrale multiple comme volume situé entre une surface et sa projection D sur le repère (O,x,y).
Intégrale multiple comme volume situé entre une surface et sa projection D sur le repère (O,x,y). Intégrale multiple comme volume situé entre un domaine du plan et son image (la surface) par une fonction.
Intégrale multiple comme volume situé entre un domaine du plan et son image (la surface) par une fonction.L'intégrale multiple est une forme d'intégrale qui s'applique aux fonctions de plusieurs variables réelles.
À l'instar des intégrales simples, les intégrales multiples possèdent des interprétations géométriques significatives. Limitons-nous pour commencer aux fonctions à valeurs réelles positives. Tandis que l'intégrale définie de fonctions d'une variable représente la mesure de l'aire délimitée par leur courbe représentative, l'axe des abscisses et les deux droites à ses bornes d'intégration (d'équations respectives x = a et x = b), l'intégrale de fonctions de deux variables (intégrale double) représente le volume délimité par leur surface représentative et le domaine d'intégration D.
En général, les intégrales de fonctions de trois variables (intégrales triples) sont interprétables comme des mesures d'hypervolumes, soit de solides à 4 dimensions, donc non représentables graphiquement.
Dans l'exemple à droite, le volume du parallélépipède P de côtés 4,6 et 5 peut se calculer de deux manières :
- Par l'intégrale double ∬D 5 dxdy de la fonction constante f définie par f(x,y) = 5 évaluée dans l'« intervalle à deux dimensions » D (région appartenant au plan xy). Dans ce cas, le volume est calculé comme la somme de tous les volumes de section infinitésimale et de hauteur 5.
- Par l'intégrale triple ∭P 1 dxdydz de la fonction constante f définie par f(x,y,z) = 1 évaluée dans l'« intervalle à trois dimensions » P coïncidant avec le parallélépipède même. Dans ce cas, le volume total est calculé comme la somme de tous les volumes infinitésimaux du domaine P.
Ces résultats coïncident tous avec la valeur V = 4 × 6 × 5 = 120, comme nous le verrons par la suite.
Dans le cadre des fonctions à plusieurs variables, donc d'intégrales multiples, on ne parle que d'intégrales définies, dans le sens où il est impossible de donner une primitive de telles fonctions.
Sommaire
Définition formelle
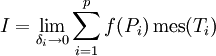
Article détaillé : intégrale de Riemann.Soit f : T → ℝ, T ⊂ ℝⁿ une fonction mesurable. Soit donc δi le plus grand diamètre d'une partition finie
 de T. Soit Pi un point de Ti, pour i ∈ {1, ..., p}. Alors, si
de T. Soit Pi un point de Ti, pour i ∈ {1, ..., p}. Alors, siexiste (et est indépendant de la succession de partitions choisie et des points Pi), I est appelé intégrale multiple de f sur T (ici mes(Ti) est la mesure de Ti) et est notée :

Intégrale double
Dans le cas où T ⊆ ℝ² , on appelle et note par
l'intégrale double de f sur T.
Intégrale triple
De la même manière, si T ⊆ ℝ³,
est appelée l'intégrale triple de f sur T.
Dans les applications pratiques, comme l'ingénierie ou la physique appliquée, on rencontre quasi exclusivement des intégrales doubles et triples, outre les simples.
Propriétés
Article détaillé : intégrale#Propriétés des intégrales.Les mêmes propriétés que pour les intégrales simples sont valables ; à savoir la linéarité, la monotonie, la valeur absolue et le théorème de la moyenne.
Linéarité
Soient f et g deux fonctions continues et bornées, D un sous-ensemble ouvert borné de ℝn. Pour tout couple de nombres réels α et β, on a :

 .
.
Théorème de la moyenne
Soit f : D → ℝ une fonction continue. Alors, si D est compact et connexe, il existe un élément (m1,m2,...,mn) de D tel que
Cette valeur est appelée “valeur moyenne” ou “moyenne integrale” de f sur D
Méthodes d'intégration
La résolution des calculs d'intégrales multiples consiste la plupart du temps à reformuler ces intégrales en une série d'intégrales simples, les seules directement calculables.
Examen direct
Dans certains cas particuliers, il est possible d'éviter le calcul et d'obtenir immédiatement le résultat.
Fonctions constantes
Dans le cas de fonctions constantes qui associent c à tout élément de ℝn, le résultat est immédiat : vu que c est la valeur moyenne de la fonction, il suffit de multiplier la mesure du domaine par la constante c. Le résultat est égal dans ℝ² au volume du cylindre de hauteur c et de génératrice la frontière du domaine, et dans ℝ³ à son hypervolume.
Exemple : et f(x,y) = 5
et f(x,y) = 5

Exploitation des symétries
Dans les cas de domaines pour lesquels sont présentes des symétries selon certains axes et que la fonction présente une imparité pour la variable correspondante, l'intégrale s'annule.
Exemple :Soit f(x,y) = 2sin(x) − 3y3 + 5 et
 le domaine d'intégration (disque de rayon 1 centré à l'origine, bord inclus). Exploitant la linéarité de l'intégration, l'on peut le décomposer en trois parties :
le domaine d'intégration (disque de rayon 1 centré à l'origine, bord inclus). Exploitant la linéarité de l'intégration, l'on peut le décomposer en trois parties :Tant
 que
que  sont impaires, et il est évident que le disque C présente une symétrie selon x et y ; par conséquent, ces deux intégrales s'annulant, la seule contribution au résultat est celle de la fonction constante 5.Exemple :
sont impaires, et il est évident que le disque C présente une symétrie selon x et y ; par conséquent, ces deux intégrales s'annulant, la seule contribution au résultat est celle de la fonction constante 5.Exemple :Soit la fonction f(x,y,z) = xexp(y2 + z2) avec pour domaine d'intégration la sphère de rayon 2 centrée à l'origine. Le domaine présente une symétrie selon les trois axes, mais il suffit celle selon x, variable selon laquelle la fonction est impaire, pour annuler toute l'intégrale.
Réduction à des intégrales simples
La réduction en intégrales simples utilise le concept de domaine simple, de façon à exprimer l'intégrale en une composition d'intégrales simples. L'intégration est effectuée de l'intérieur vers l'extérieur, chaque fois par rapport à une seule variable en considérant les autres constantes – de la même façon que pour le calcul de dérivées partielles.
Domaines simples dans ℝ²
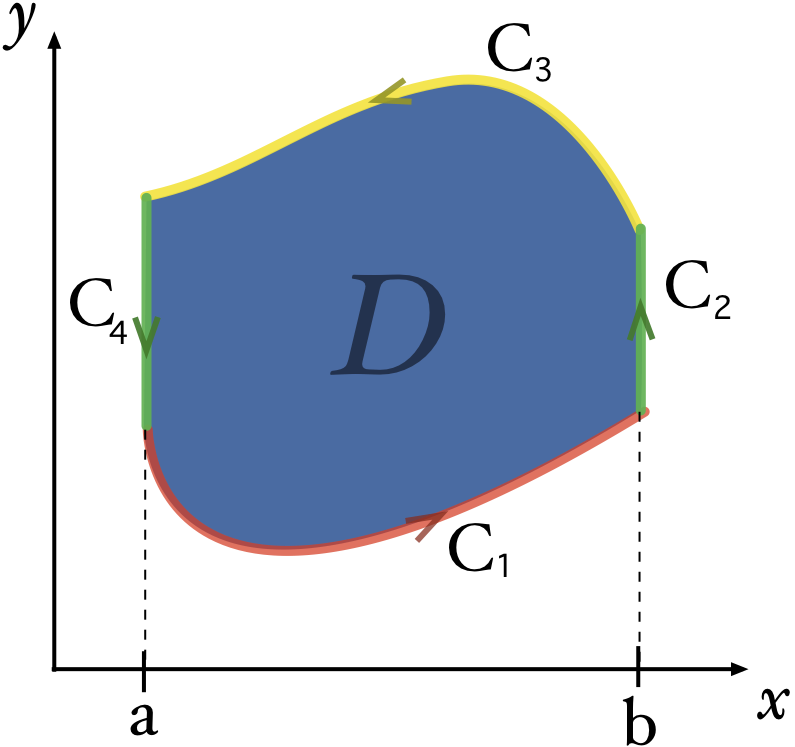
 Domaine simple défini par les courbes C1(x), C3(x) et les droites x = a et x = b.
Domaine simple défini par les courbes C1(x), C3(x) et les droites x = a et x = b.Soient a et b deux nombres réels, et y1(x) et y2(x) les deux fonctions continues (éventuellement par morceaux) de ]a,b[ vers ℝ – telles que ∀x ∈ ]a,b[, y₁(x) < y₂(x) – qui définissent un domaine D mesurable et borné :
 .
.
On appelle ce domaine un domaine simple (ou défini par des conditions simples) « orthogonal » à l'axe x, car au moins une de ses bornes (ici les deux droites d'équation x = a et x = b) est perpendiculaire à l'axe des x.
On définit de la même manière un domaine orthogonal à l'axe y en définissant des fonctions x1(y), x2(y) et deux nombres a et b tels que ∀y ∈ ]a,b[, x₁(y) < x₂(y) :
 .
.
Théorème
Théorème — Pour toute fonction f, continue sur un domaine simple D orthogonal à x, on a :
 .
.
Pour plus de commodité, on note :
 .
.
De la même manière, si D est défini orthogonal à y,
 .
.
Ce résultat s'étend aux fonctions d'un nombre quelconque de variables.
On le voit, l'ordre des intégrations n'importe pas, pour peu qu'on ait défini le domaine en adéquation. C'est une conséquence directe du théorème de Fubini.
 Domaine simple défini par y1(x) = x2 et y2(x) = 1, pour ]a,b[ = ]0,1[.Exemple :
Domaine simple défini par y1(x) = x2 et y2(x) = 1, pour ]a,b[ = ]0,1[.Exemple :Soit
 (voir dessin). On se propose de calculer :
(voir dessin). On se propose de calculer : .
.
Ce domaine est perpendiculaire tant à x qu'à y. Pour pouvoir le définir en conditions simples, on cherche les deux fonctions et les deux nombres réels qui définissent ses bornes. Dans ce cas les fonctions sont y1(x) = x2 et y2(x) = 1 et le domaine est donné par l'intersection des fonctions avec la droite x = 0 et leur point d'intersection (x,y) = (1,1). On a donc [a,b] = [0,1]. Appliquons le théorème, en commençant par intégrer selon y :
On aboutit à une simple intégrale définie :
![\int_0^1 \left[xy + \frac{y^2}{2} \right]^1_{x^2} \mathrm dx = \int_0^1 \left(x + \frac{1}{2} - x^3 - \frac{x^4}{2}\right) \; \mathrm{d}x = \ldots = \frac{13}{20}](/pictures/frwiki/52/4491be8d5e7077552ca83027819f30c0.png) .
.
Si on avait choisi de définir le domaine par rapport à y, on aurait obtenu l'expression :
conduisant au même résultat.
Domaines simples dans ℝ³
L'extension aux intégrales triples est immédiate. Considérons un domaine T défini par des conditions simples
 .
.
On a :
La définition est analogue pour les 5 autres cas d'orthogonalité dans ℝ³. De manière générale, le nombre de points de vue possibles dans ℝn est donné par la factorielle de n.
 Domaine orthogonal au plan xy dans ℝ³Exemple :
Domaine orthogonal au plan xy dans ℝ³Exemple :Considérons un domaine T de ℝ³ orthogonal au plan xy (voir dessin)

 .
.
Sa projection sur xy est un domaine D de ℝ² défini orthogonal à y par
 .
.Changement de variables
Article détaillé : intégration par changement de variables.Souvent, lorsque les méthodes précédentes ne sont pas efficaces (domaine difficile à exprimer ou fonction difficile à intégrer), on a recours à un changement de variables afin de reformuler l'intégrale de façon plus commode. Il s'en suit que :
- La fonction doit être réécrite selon la transformation ;
- Idem pour le domaine, car il est délimité par des fonctions dépendantes des variables de départ auxquelles on a appliqué la transformation ;
- Le nouvel intégrande dépend du déterminant de la matrice jacobienne (le jacobien) contenant les dérivées partielles de la transformation selon les nouvelles variables.
Changement de variables dans une intégrale double — Soient D et E deux sous-ensembles ouverts bornés de ℝ² et
 une bijection de classe C1 de E dans D. Alors pour toute fonction continue et bornée f : D → ℝ on a :
une bijection de classe C1 de E dans D. Alors pour toute fonction continue et bornée f : D → ℝ on a : .
.
Ici, les fonctions
 et
et  sont celles qui associent les nouvelles variables u et v aux anciennes, x et y.
sont celles qui associent les nouvelles variables u et v aux anciennes, x et y.Par extension :
Changement de variables dans une intégrale multiple — Soient D et E deux sous-ensembles ouverts bornés de ℝn et (Φ1,...,Φn)(u1,...,un) une bijection de classe C1 de E dans D. Alors pour toute fonction continue et bornée f : D → ℝ on a :

 .
.
Coordonnées polaires
 Passage d'un secteur annulaire de coordonnées cartésiennes à polaires
Passage d'un secteur annulaire de coordonnées cartésiennes à polairesDans ℝ², si le domaine présente une symétrie circulaire (c-à-d décrit un secteur annulaire) et que la fonction a des caractéristiques particulières, l'on peut appliquer une transformation en coordonnées polaires ; c'est-à-dire que les points en coordonnées cartésiennes sont réexprimés en coordonnées polaires. Cela permet de changer la forme du domaine et de faciliter l'intégration.
D'après la définition de ce système de coordonnées, la transformation à effectuer est :
 .Exemple :
.Exemple :Soit f(x,y) = x2 + y2. Dans ce cas, f(r,θ) = r2(cosθ2 + sinθ2) = r2 (grâce aux identités trigonométriques, très utiles dans ces calculs).
Réexpression du domaine
La transformation du domaine s'effectue en exprimant la longueur des rayons du secteur annulaire et l'ampleur de l'angle décrit, afin de définir les intervalles de r et θ à partir de x et y.
Exemple :Considérons D = {(x,y) | x² + y² ≤ 4}, soit un disque de rayon 2 ; il est évident que l'angle décrit est celui d'un tour complet. Ainsi, θ variera de 0 à 2π et r de 0 à 2.
Exemple : Passage d'un anneau des coordonnées cartésiennes aux polaires
Passage d'un anneau des coordonnées cartésiennes aux polairesConsidérons D = {(x,y) | 4 ≤ x² + y² ≤ 9, y ≥ 0}, soit une demi-couronne de rayon extérieur 3 et de rayon intérieur 2 (voir dessin), limitée aux y positifs ; on voit que θ varie de 0 à π et r de 2 à 3. Par conséquent, le domaine transformé en coordonnées polaires est le rectangle T = {(r,θ) | 2 < r < 3, 0 < θ < π}.
Jacobien, intégration
Comme indiqué précédemment, le passage en coordonnées polaires est le changement de variables
 . Les nouvelles variables sont l'angle θ et le rayon r, et les fonctions
. Les nouvelles variables sont l'angle θ et le rayon r, et les fonctions  et
et  sont celles qui les associent à x et y. On peut donc définir formellement cette transformation par l'application suivante :
sont celles qui les associent à x et y. On peut donc définir formellement cette transformation par l'application suivante :La matrice jacobienne de l'application au point (r,θ) est :
Le jacobien du passage en coordonnées polaires est donc rcos2(θ) + rsin2(θ) = r et on a :
 Exemple :
Exemple :Soit f(x,y) = x à intégrer sur le domaine de l'exemple précédent (r ∈ [2,3] et θ ∈ [0,π]). Transformons la fonction :
 ;
;
puis appliquons la formule pour l'intégration :
 .
.
Enfin :
![\int_0^\pi\mathrm d\theta\int_2^3 r^2\cos\theta\;\mathrm dr = \int_0^\pi\cos\theta\;\mathrm d\theta \left[ \frac{r^3}{3}\right]_2^3 = [\sin\theta]_0^\pi \left(9 - \frac{8}{3}\right) = 0](/pictures/frwiki/50/25fa916ede8aeeabcec98b913980bc2f.png) .
.
Exemple :Soit f(x,y) = 1 à intégrer sur
 , c'est-à-dire un disque de rayon R. r varie donc de 0 à R et θ de 0 à 2π. Il vient :
, c'est-à-dire un disque de rayon R. r varie donc de 0 à R et θ de 0 à 2π. Il vient :Où l'on retrouve la formule classique pour le calcul de la superficie d'un disque.
Coordonnées cylindriques
 Système de coordonnées cylindriques
Système de coordonnées cylindriquesDans ℝ³, l'intégration sur des domaines ayant une base circulaire peur s'effectuer via un passage en coordonnées cylindriques :

La réexpression du domaine n'est pas difficile compte tenu que seule la forme de la base du domaine change, tandis que le développement tridimensionnel du domaine suit l'original.
Exemple :Soit D = {(x,y,z) | 4 ≤ x² + y² ≤ 9, 0 ≤ z ≤ 5} (le tube de rayon compris entre 2 et 3 et d'hauteur 5). Après transformation, l'on obtient le domaine T = {(r,θ,z) | 2 ≤ r ≤ 3, 0 ≤ θ ≤ 2π, 0 ≤ z ≤ 5} (le parallélépipède de largeur comprise entre 2 et 3, de longueur 2π et de hauteur 5).
Vu que la composante z reste inchangée durant la transformation, le jacobien est le même que lors du passage en coordonnées polaires, et l'on a :

Il est conseillé d'utiliser cette méthode dans les cas de domaines cylindriques, coniques, ou tout du moins de régions pour lesquelles il est commode tant de délimiter l'intervalle des z que de transformer la base circulaire et la fonction.
Exemple :Soit f(x,y,z) = x2 + y2 + z à intégrer sur le cylindre D = { (x,y,z) | x² + y² ≤ 9, -5 ≤ z ≤ 5}. La transformation de D en coordonnées cylindriques est la suivante :
tandis que la fonction devient
- f(r,θ,z) = r2 + z
Appliquons la formule :
 ;
;
En développant :
![\int_{-5}^5 \mathrm{d}z \int_0^{2 \pi} \mathrm{d} \theta\int_0^3 r^3 + r z\; \mathrm{d}r = 2 \pi \int_{-5}^5 \left[ \frac{r^4}{4} + \frac{r^2}{2}z \right]_0^3 \mathrm{d}z](/pictures/frwiki/100/d77c32f9938e3e344c70e4b39949723c.png)
![= 2 \pi \int_{-5}^5 \left( \frac{81}{4} + \frac{9}{2} z\right) \mathrm{d}z = 2 \pi \left[ \frac{81}{4}z + \frac{9}{4}z^2 \right]^5_{-5} = 405 \pi](/pictures/frwiki/98/bf576386627e4882fdd9690139c29dc2.png) .
.
Coordonnées sphériques
 Système de coordonnées sphériques
Système de coordonnées sphériquesCertains domaines de ℝ³ présentent une symétrie sphérique, ainsi il est possible d'exprimer les coordonnées de leurs points à l'aide de deux angles θ (longitude) et φ (colatitude ou zénith) et d'une distance à l'origine ρ. Le passage en coordonnées sphériques est la transformation :

Notons que les points appartenant à l'axe z n'ont pas de détermination unique dans ce système, donc φ ne peut varier que de 0 à π.
Le domaine d'intégration le plus adapté à cette transformation est évidemment la sphère.
Exemple :Soit
 (sphère de rayon 4 centrée à l'origine). En coordonnées sphériques, celui-ci s'exprime comme
(sphère de rayon 4 centrée à l'origine). En coordonnées sphériques, celui-ci s'exprime comme  .
.Le jacobien de cette transformation est le suivant :
Dès lors, on a :

Il est conseillé d'utiliser cette méthode dans le cas de domaines sphériques et de fonctions facilement simplifiables à l'aide des identités trigonométriques étendues à ℝ³ (voir l'exemple suivant) ; dans les autres cas il est souvent conseillé de recourir au passage en coordonnées cylindriques, comme nous le verrons ci-après.
Exemple :Soit f(x,y,z) = x2 + y2 + z2 à intégrer sur le même domaine D que dans l'exemple précédent. La transformation de la fonction est très simple :
 ,
,
tandis que nous connaissons déjà le domaine reformulé en coordonnées sphériques :
 .
.
Appliquons donc la formule pour l'intégration :
 ;
;
développons :
![\iiint_T \rho^4\sin\theta \;\mathrm{d}\rho\mathrm{d}\theta\mathrm{d}\phi =
\int_0^\pi \sin\theta\mathrm{d}\theta \int_0^4 \rho^4\mathrm{d}\rho \int_0^{2\pi} \mathrm{d} \phi =
2 \pi \int_0^\pi \sin \theta\left[ \frac{\rho^5}{5}\right]_0^4 \;\mathrm{d} \theta](/pictures/frwiki/56/86ae280b2f55a4e2abe6c1882828cc0d.png)
![= 2 \pi \left[ \frac{\rho^5}{5} \right]_0^4 \;[- \cos \theta ]_0^\pi = 4 \pi \cdot \frac{1024}{5} = \frac{4096 \pi}{5}](/pictures/frwiki/57/9faf56f7b7e26565ba6e75fa4940e79b.png) .
.
Exemple :Soit D la sphère de rayon 3a (D = {(x,y,z) | x² + y² + z² ≤ 9a²}) et f(x,y,z) = x2 + y2.
En observant le domaine, il pourrait sembler commode d'adopter un passage en coordonnées sphériques ; en effet la transformation du domaine est immédiate : .
.
Toutefois, la transformation de la fonction mène à :
 .
.
En appliquant la formule, on obtiendrait :
 ,
,
ce qui est très compliqué à calculer. Le problème se résout en passant en coordonnées cylindriques. Les nouveaux intervalles du domaine deviennent :
 .
.
L'intervalle des z a été obtenu en résolvant l'inéquation dans la définition de D (et en transformant directement x2 + y2 en ρ2). La nouvelle fonction est simplement ρ2. Appliquons la formule :
 ,
,
développons :
 .
.
Pour parfaire le calcul, posons le changement de variable suivant :
(l'intervalle d'intégration devient [9a2,0]). On a :
 ;
;
vu que ρ2 = 9a2 − t, il vient :
 ;
;
en intervertissant les bornes d'intégration et distribuant les termes entre parenthèses, l'intégrale peut se décomposer en deux parties facilement calculables :
![2 \pi\left[ \int_0^{9 a^2} 9 a^2 \sqrt{t} \;\mathrm{d}t - \int_0^{9 a^2} t \sqrt{t} \;\mathrm{d}t\right] = 2 \pi \left[9 a^2 \frac{2}{3} t^{ \frac{3}{2} } - \frac{2}{5} t^{ \frac{5}{2}}\right]_0^{9 a^2}](/pictures/frwiki/50/2b932e131495d634abe6d90466330e70.png)
 .
.
Exemples d'applications : calculs de volumes
Article détaillé : volume#Volume et calcul intégral.Grâce aux méthodes décrites précédemment, il est possible de démontrer les règles de calcul du volumes de certains solides.
Cylindre :Considérons comme domaine la base circulaire de rayon R et comme fonction la hauteur constante h, et appliquons directement le passage en coordonnées polaires.
ce qui correspond bien à la formule Volume = aire de base · hauteur = πR² · h.
Sphère :Encore plus rapide, intégrons la fonction constante 1 sur la sphère de rayon R :
Tétraèdre :Le volume du tétraèdre, avec un sommet à l'origine et des arêtes génératrices de longueur ℓ placées le long des trois axes, peut être calculé grâce aux formules de réduction en considérant, par exemple, l'orthogonalité selon le plan xy et l'axe x :

![= \int_0^\ell \left( \ell^2 - 2\ell x + x^2 - \frac{ (\ell-x)^2 }{2} \right) \mathrm{d}x = \ell^3 - \ell \ell^2 + \frac{\ell^3}{3} - \left[ \frac{\ell^2}{2} - \ell x + \frac{x^2}{2} \right]_0^\ell](/pictures/frwiki/52/47a2cad299675e1030f54a62bb602c50.png)
 ,
,
ce qui correspond bien à la formule Volume = ⅓ · aire de base · hauteur = ⅓ · ℓ²/2 · ℓ = ℓ³ / 6.
Intégrale multiple impropre
 Exemple de domaine impropreArticle connexe : intégrale impropre.
Exemple de domaine impropreArticle connexe : intégrale impropre.Dans le cas de domaines illimités ou d'intégrandes illimités d'un côté quelconque du bord du domaine, on parle d'intégrale multiple impropre.
Si une fonction est non nulle, l'intégrale converge ou diverge à l'infini.
Références
- Jacques Douchet et Bruno Zwahlen, Calcul différentiel et intégral : Fonctions réelles de plusieurs variables réelles, Presses polytechniques et universitaires romandes, 2004, 2e édition (1re éd. 1998), (ISBN 2880742579).
 Portail des mathématiques
Portail des mathématiques
Catégorie : Théorie de l'intégration







![\iint_D (x+y) \;\mathrm{d}x\mathrm{d}y = \int_0^1\mathrm{d}x\int_{x^2}^1(x+y)\mathrm{d}y = \int_0^1 \mathrm{d}x \left[xy + \frac{y^2}{2}\right]^1_{x^2}](/pictures/frwiki/54/68df4789e5d27d6d04d1045a7eb34610.png)








![\int_0^R \int_0^{2\pi} r\;\mathrm dr \mathrm d\theta = \int_0^Rr\;\mathrm dr \int_0^{2\pi}\mathrm d\theta = \left[\frac{r^2}{2}\right]_{0}^{R}\bigl[\theta\bigr]_0^{2\pi} =\frac{R^2}{2} 2\pi=\pi R^2](/pictures/frwiki/54/65874226cd705838985862b8fe267e76.png)





![V = \int_0^{2 \pi} \mathrm{d} \phi \int_0^r h \rho \;\mathrm{d} \rho = h 2 \pi\left[ \frac{\rho^2}{2} \right]_0^R = \pi R^2 h](/pictures/frwiki/56/87f2a8d51296da98db9b6fae743547e5.png)

![2 \pi \int_0^\pi \sin \theta \frac{R^3}{3} \mathrm{d} \theta = \frac{2}{3} \pi R^3 \bigl[ - \cos \theta\bigr]_0^\pi = \frac{4}{3} \pi R^3](/pictures/frwiki/98/b4dea01a24428ef43169ced3aeee081f.png)


Wikimedia Foundation. 2010.