- Lunar Roving Vehicle
-
Rover lunaire
 Eugene A. Cernan conduisant un Rover lunaire lors de la mission Apollo 17 avant son assemblage final (les caméras et antennes ne sont pas installées).
Eugene A. Cernan conduisant un Rover lunaire lors de la mission Apollo 17 avant son assemblage final (les caméras et antennes ne sont pas installées).
Le Rover lunaire[Note 1] (Lunar Roving Vehicle ou LRV en anglais) est un véhicule fabriqué à quatre exemplaires pour l'agence spatiale américaine (NASA) qui fut utilisé par les astronautes au cours des missions Apollo pour explorer la surface de la Lune. Le Rover lunaire a roulé pour la première fois le 31 juillet 1971 dans le cadre la mission Apollo 15.
Ce petit engin tout-terrain biplace à l'allure rustique (masse à vide de 210 kg pour une longueur de 3 mètres) pouvait transporter plus de 490 kg de charge utile à la vitesse modeste de 14 km/h grâce à quatre moteurs électriques de 0,25 ch alimentés par des batteries non rechargeables. Sur le plan technique il était doté d'un système de navigation perfectionné et de roues d'une conception originale.
Le Rover fut conçu sans que les caractéristiques du sol lunaire soient connues avec précision. Il devait fonctionner dans un environnement particulièrement hostile (température élevée, absence d'atmosphère, faible gravité, terrain accidenté et meuble) difficilement reproductible sur terre. Malgré ces contraintes, le Rover lunaire a rempli sans problèmes majeurs les objectifs qui lui étaient assignés.
Au cours des trois missions qui le mirent en œuvre (Apollo 15, Apollo 16 et Apollo 17), le rover permit aux astronautes d'accroître considérablement leur rayon d'action. Grâce au rover lunaire les astronautes purent prospecter un plus grand nombre de sites permettant d'améliorer notre compréhension de la géologie et de la formation de la Lune.
Sommaire
Genèse
Le rover dans les œuvres de science-fiction
 Un concept récent de Rover lunaire équipé d'une cabine pressurisée
Un concept récent de Rover lunaire équipé d'une cabine pressuriséeLes ouvrages de science-fiction du début du XXe siècle sont les premiers à avoir développé le concept d'un véhicule permettant de transporter des hommes sur la surface de la Lune. Le premier rover lunaire apparaît dans le roman de science-fiction A Srebyym Globie (Sur le Monde d'Argent) publié en 1901 par le polonais Jerzy Żuławski : le véhicule imaginé comporte une cabine pressurisée, est propulsé par un moteur électrique et utilise une combinaison de roues et de « jambes » bioniques. L'écrivain américain Hugo Gernsback, dans son ouvrage Les Aventures Scientifiques du baron Münschausen (1915), imagine un véhicule qui prend la forme d'une sphère de 18 mètres de diamètre qui utilise pour se mouvoir une chenille qui fait le tour de sa circonférence[1]. L'écrivain et scientifique russe Constantin Tsiolkovski, père de l'astronautique, décrit dans son roman « Au-delà de la terre » (1918) un véhicule lunaire biplace sur roues doté d'une cabine pressurisée et propulsé par des moteurs électriques. L'engin est doté d'un système de contrôle thermique dont les principes seront repris par la suite pour certaines sondes spatiales. De petites fusées sont mises à feu pour franchir les crevasses[2].
Durant les années 1920 et 1930, les véhicules lunaires décrits dans les ouvrages de science-fiction relèvent plus d'une démarche humoristique que scientifique. Dans les années 1950, alors que la course à l'espace est lancée, le sujet reçoit un traitement plus sérieux. Le mathématicien et physicien britannique Arthur C. Clarke est le premier à décrire dans l'article The Exploration of Space (L'Exploration de l'Espace), un véhicule lunaire plus réaliste[2] : « Des véhicules pressurisés équipés de grands pneumatiques qui auront les mêmes fonctions que sur Terre. Leurs moteurs seront électriques et l'énergie sera stockée dans des batteries ou fournie par une turbine, et seront propulsés par des fusées au fuel […]. »[3].
Du prototype au rover lunaire Apollo
Au début des années 1960, le programme Apollo qui doit conduire l'homme sur la lune est lancé. La construction d'un véhicule lunaire sort brutalement du domaine de la fiction. Mais la NASA, accaparée par la mise au point de la fusée Saturn V et des modules spatiaux, peine à définir un programme d'exploration de la lune et les moyens nécessaires. Durant cette période le Centre de vol spatial Marshall de la NASA expérimente différents prototypes de véhicule lunaire.
Les prototypes du Centre Marshall de la Nasa (1960-1969)
Les études scientifiques américaines relatives à un véhicule lunaire sont menées à compter des années 1950 : elles portent sur des véhicules de grande dimension, disposant d'une autonomie importante et prennent en compte le caractère particulièrement hostile de l'environnement lunaire[4].
La première étude poussée est réalisée en 1959 au sein de l'Agence pour les missiles balistiques de l'armée américaine. Cette administration, qui a en charge le développement de la fusée Redstone, souhaite définir le matériel nécessaire au fonctionnement d'une base sur la lune. L'étude porte à l'époque sur un véhicule à roues biplace pesant 900 kg et comportant une cabine pressurisée. Propulsé par des moteurs électriques alimentés par des batteries rechargeables, le véhicule a une autonomie comprise entre 80 et 240 km. En 1960, l'agence spatiale américaine NASA, qui vient tout juste d'être mise sur pied, reprend une partie de l'équipe chargée de cette étude, dont Wernher von Braun, au sein du Centre de vol spatial Marshall (Marshall Space Flight Center) et poursuit ces travaux ; à l'époque les chercheurs écartent déjà l'utilisation du pneu et préconisent un véhicule dont les quatre roues seraient mues par des moteurs électriques indépendants. Au début des années 1960 la NASA demande à plusieurs industriels des études ponctuelles sur un véhicule destiné aux missions du programme spatial qui doivent se dérouler après le débarquement sur la lune. À l'époque le scénario retenu est que ce matériel sera transporté sur la lune par une fusée dédiée, distincte de celle qui amène les astronautes : la contrainte de poids joue donc un rôle mineur dans la conception du véhicule.
En 1962, la NASA étudie avec les sociétés aérospatiales Northrop et Grumman les spécifications d'un véhicule lunaire biplace. Deux des modèles les plus représentatifs sont : un véhicule de grande taille (longueur 5,4 m et largeur 2 m) pesant 3 tonnes, pouvant accomplir des missions de 30 jours et parcourir 450 km à 14 km/h ; un véhicule de plus petite taille (longueur 3,6 m et largeur 2,5 m) pesant 1,5 tonnes pouvant accomplir des missions de 7 jours et parcourir 368 km à 7 km/h. Les deux véhicules sont dotés d'une cabine pressurisée, utilisent des roues métalliques flexibles et sont propulsés par des moteurs électriques alimentés par des piles à combustible. Le mérite de ces études est de faire un inventaire exhaustif des options techniques existantes.
En 1964, le Centre Marshall demande aux sociétés Boeing et Bendix de concevoir un véhicule, qui prend l'appellation MOLAB (Mobile Laboratory), permettant de transporter deux personnes sur une période de 14 jours. Il s'agit d'anticiper le besoin qui devrait logiquement découler du programme Apollo. Le prototype proposé par Bendix, équipé de 4 roues métalliques, pèse 3 060 kg et peut transporter en plus de l'équipage trois tonnes de matériel dans une cabine pressurisée, sur une distance de 100 km. Les dimensions du véhicule sont importantes : 9 m de long dont 3,6 m pour la cabine pressurisée et 2 m de large[5]. Des modèles - allégés au sixième de leur poids pour simuler la gravité lunaire - les MTA (Mobility Test Article) sont construits par les deux industriels et testés pour évaluer leur comportement. En parallèle la NASA fait étudier un concept de véhicule lunaire léger, le LSSM (Local Scientific Survey Module), monoplace et sans cabine pressurisée[6].
La lente maturation du programme d'exploration du projet Apollo
Le 25 mai 1961, le président Kennedy, prend la décision d'envoyer des hommes sur la Lune avant la fin de la décennie, pour reprendre la suprématie aérospatiale aux russes. Le projet Apollo est lancé. Toutefois, au cours des années qui suivent, la NASA peine à définir le programme d'exploration de la Lune et les moyens nécessaires sur place (dont le véhicule lunaire) ; en effet toutes ses ressources sont mobilisées par la mise au point de la fusée Saturn V, du module de commande et du module lunaire (au moment de la déclaration du président Kennedy la NASA n'avait réussi à effectuer qu'un seul vol balistique de 15 minutes (vol Mercury III)[7]).
En 1962, la NASA abandonne le concept d'un envoi sur la Lune en deux temps (une fusée pour l'équipage, une autre pour le matériel lourd) pour les missions Apollo programmées : la technique du rendez-vous en orbite lunaire entre module lunaire (LEM) et les modules ramenant les astronautes sur la terre permet d'effectuer la mission avec une seule fusée, grâce au gain de poids sur la masse à envoyer en orbite. Cette décision porte en germe l'abandon d'un véhicule lunaire lourd incompatible avec les capacités de la fusée Saturn V quand viendra le temps des arbitrages budgétaires.
En août 1967, la conférence de Santa-Cruz réunit la communauté scientifique et les responsables de la NASA pour définir les objectifs prioritaires du programme d'exploration de la Lune et les moyens à mettre en œuvre dans le cadre des futures missions Apollo. Le consensus se fait sur la mise à disposition d'un véhicule permettant d'élargir le rayon d'action des astronautes de 500 mètres (prévu pour les premières missions) à 10 km. La communauté scientifique demande également le développement d'un avion lunaire piloté permettant d'explorer des zones éloignées et d'un engin à roues à plus grand rayon d'action (25 km) pouvant être piloté à distance et effectuer des investigations automatiques après le départ des astronautes (le Local Scientific Survey Module ou LSSM). Ces véhicules en tout ou partie doivent être expédiés sur la lune dans une fusée dédiée (mission avec double lancement)[8].
En 1968, la société General Motors étudie la possibilité d'envoyer un véhicule sur la Lune dans la même fusée que les astronautes et détermine qu'un engin de petit format sans cabine pressurisée et capable d'effectuer trois excursions de 20 km peut être placé dans l'étage de descente du module lunaire (LEM).
Début 1969, des études sont entreprises pour vérifier que la fusée Saturn V peut placer en orbite une charge supplémentaire, et que le module lunaire peut effectuer des missions plus longues sur la lune. Les conclusions positives (Saturn V après évolution peut satelliser 2 tonnes supplémentaires) donnent le coup d'envoi au développement du rover lunaire proposé par General Motors[9]. Le 27 mai 1969, la NASA décide officiellement de développer un Rover lunaire léger et confie logiquement la responsabilité de sa construction au Centre Marshall qui étudie le sujet depuis près d'une décennie. Le rover doit être embarqué sur les missions Apollo à compter de 1971.
Après le succès du premier alunissage (Apollo 11, juillet 1969), des études préliminaires sont lancées pour le développement de l'avion lunaire et du véhicule lunaire bi-mode (le LSSM)[10].
En septembre 1970 des coupes budgétaires drastiques dans le programme Apollo, traduisant les nouvelles priorités du gouvernement Nixon, entraînent l'abandon des missions Apollo postérieures à Apollo 17. L'envoi sur la lune d'un véhicule lunaire lourd de type LSSM ou MOLAB est reporté sine die[11].
Le développement du rover lunaire des missions Apollo
La conception
Le rover doit être développé en un laps de temps particulièrement court (17 mois). Une équipe projet est montée par le Centre Marshall avec, à sa tête, Saverio F. Morea, un spécialiste des moteurs de fusée. Dès juillet 1969 un cahier des charges en 22 points, capitalisant les années de recherche effectuées par le centre, est soumis à 29 entreprises. Le véhicule à construire doit être un engin tout-terrain (les performances dans ce domaine sont fournies) biplace sans cabine pressurisée d'une masse inférieure à 181 kg qui doit pouvoir tenir dans l'emplacement d'une baie de l'étage de descente du module lunaire. Il doit pouvoir réaliser quatre excursions de 30 km sur un laps de temps de 78 heures et transporter 350 kg de charge utile. La NASA précise également que le véhicule doit comporter 4 roues propulsées par des moteurs électriques indépendants alimentées par des batteries électriques. Le rover doit pouvoir atteindre une vitesse de 16 km/h. L'astronaute qui conduit le véhicule doit disposer d'un tableau de bord lui restituant les données les plus importantes. Les redondances doivent permettre au rover de fonctionner en cas de panne d'un de ses composants. La fiabilité combinée des composants doit permettre au rover de remplir tous ses objectifs avec une probabilité de 95 %[Note 2],[12].
Il est prévu que les caractéristiques du véhicule soient figées en deux temps : une première esquisse doit être soumise aux responsables de la NASA au bout de 10 semaines et le dessin final au bout de 22 semaines. Quatre sociétés répondent à l'appel d'offres : Chrysler, Grumman, Bendix, Boeing. Cette dernière remporte en octobre 1969 le marché avec en sous-contractant principal Delco filiale de General Motors[12].
Durant la phase de conception la principale difficulté est le respect de la contrainte de poids : le premier rover envoyé sur la lune pèse ainsi 30 kg de plus que l'objectif assigné (210 au lieu de 181 kg). Une autre difficulté majeure découle de la faible connaissance de la texture du sol lunaire sur laquelle le rover va devoir circuler même si les reconnaissances effectuées par les sondes Surveyor puis les premières missions Apollo ont permis de déterminer que la poussière lunaire n'allait pas engloutir les rovers. Finalement Boeing soumet en janvier 1970 une première esquisse du rover à la NASA et aux astronautes qui firent des suggestions pertinentes. En juin de la même année la conception du véhicule est figée[12].
De la conception à la livraison le Centre Marshall va apporter également une contribution importante pour la mise au point du mécanisme de déploiement du rover sur la Lune, le système de navigation et en fournissant des moyens de test.
La fabrication et les tests
Vidéo d'un des prototypes RoverQuatre véhicules lunaires sont construits : ils seront utilisés au cours des missions Apollo 15, 16 et 17, le quatrième fournissant des pièces de rechange après la décision d'annuler les missions Apollo suivantes[13]. Huit autres modèles sont réalisés pour mettre au point le rover. Un modèle à l'échelle 1 est utilisé pour valider l'ergonomie. Un deuxième exemplaire sert à tester les organes de roulement et le système de conduite. Un prototype permet de vérifier la compatibilité avec le module lunaire. Deux exemplaires pesant 1⁄6 du poids du modèle final - afin de reproduire les conditions de la gravité lunaire - sont utilisés pour la conception du système de déploiement du rover. Un exemplaire est affecté à l'entraînement des astronautes, qui l'utilisent sur des terrains simulant l'environnement lunaire. Un rover réalise les essais de vibration, dans le vide et à haute et basse températures. Enfin un dernier exemplaire permet de vérifier la longévité de chaque composant en simulant une utilisation de 4 fois supérieure à celle prévue[14].
La roue était un organe critique dont la conception était particulièrement originale. Pour tester son efficacité des moyens importants sont utilisés. En particulier, une campagne de tests sera effectuée pour reproduire le fonctionnement de la roue dans les conditions lunaires. Une installation comprenant une roue du rover tournant dans une espèce de manège sur un sol reproduisant la poussière lunaire est placée dans une chambre à vide qui est elle-même embarquée dans un avion de transport KC-135 affecté aux essais. Celui-ci effectue plusieurs vols balistiques pour reproduire la gravité lunaire dans la cabine et permettre d'étudier ainsi le comportement de la roue[15]. Les astronautes s'entraînent à terre mais également dans le KC-135 pour mettre au point les opérations qu'ils devront effectuer avec le rover dans des conditions de gravité lunaire.
Bien que le lancement d'Apollo 15 - première mission à emporter le rover - ait été décalé de 3 mois, le développement du tout-terrain accuse à un moment 2 mois de retard par rapport au planning. Le décalage est par la suite comblé et un véhicule à structure renforcée, adapté à la gravité terrestre, est livré le 18 novembre 1970 aux astronautes pour leur entraînement. Le 15 mars 1971, le premier véhicule opérationnel est livré pour les tests de pré-lancement et 8 semaines plus tard le rover est installé dans la baie du module lunaire[16].
Le coût prévu est de 19 millions[17] de dollars, financés par Boeing et son principal sous-traitant Delco, mais les dépassements conduisent à un prix de revient final de 38 millions de dollars[13].
Les caractéristiques du rover
 Eugène Cernan à côté du rover de la mission Apollo 17
Eugène Cernan à côté du rover de la mission Apollo 17Le Rover a une allure rustique, décevante par rapport au dessin des prototypes MOLAB : cela est dû à l'absence de cabine pressurisée mais également de tout carénage, article superflu en l'absence d'atmosphère et incompatible avec la chasse au poids qui a présidé à la conception du véhicule. La survie des passagers dans l'environnement hostile de la lune, est prise en charge pour une durée maximum de 7 heures par les combinaisons et le système de survie (PLSS) que les astronautes transportent sur leur dos.
Le rover a une masse à vide de 210 kg (poids de 2 060 N sur la Terre/342 N sur la Lune). À pleine charge sa masse passe à 700 kg (poids sur Terre : 6 867 N, sur la Lune de 1 141 N) avec une charge utile de 490 kg (4 807 N sur Terre, 799 N sur la surface lunaire) se décomposant en 363 kg pour les 2 astronautes et 172 kg pour les échantillons lunaires, l'outillage et divers équipements[18].
Bien qu'une redondance systématique permette au véhicule de fonctionner en cas de panne d'un de ses composants, la NASA a décidé que les astronautes doivent être capables de retourner au module lunaire à pied en cas de panne du rover. Aussi le rayon d'action du rover est limité à 10 km, cette distance diminuant au fur et mesure du déroulement de la mission et de l'épuisement des consommables vitaux contenu dans le scaphandre des astronautes[19].
Le châssis
Le châssis mesure 3,1 m de long pour un empattement de 2,3 m et une largeur de 1,8 m. La hauteur maximale est de 1,14 m et la garde au sol à pleine charge de 35 cm[20]. Le châssis est réalisé en tubes d'alliage d'aluminium type 2219 soudés. Pour que le rover puisse être stocké dans l'espace restreint qui lui est dédié dans le module lunaire, les parties avant et arrière du châssis sont articulées et peuvent se replier sur la partie centrale, les roues étant alors couchées en diagonale.
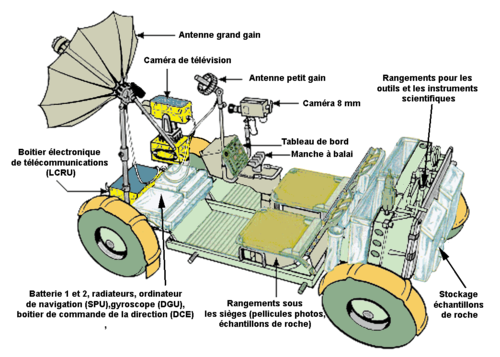
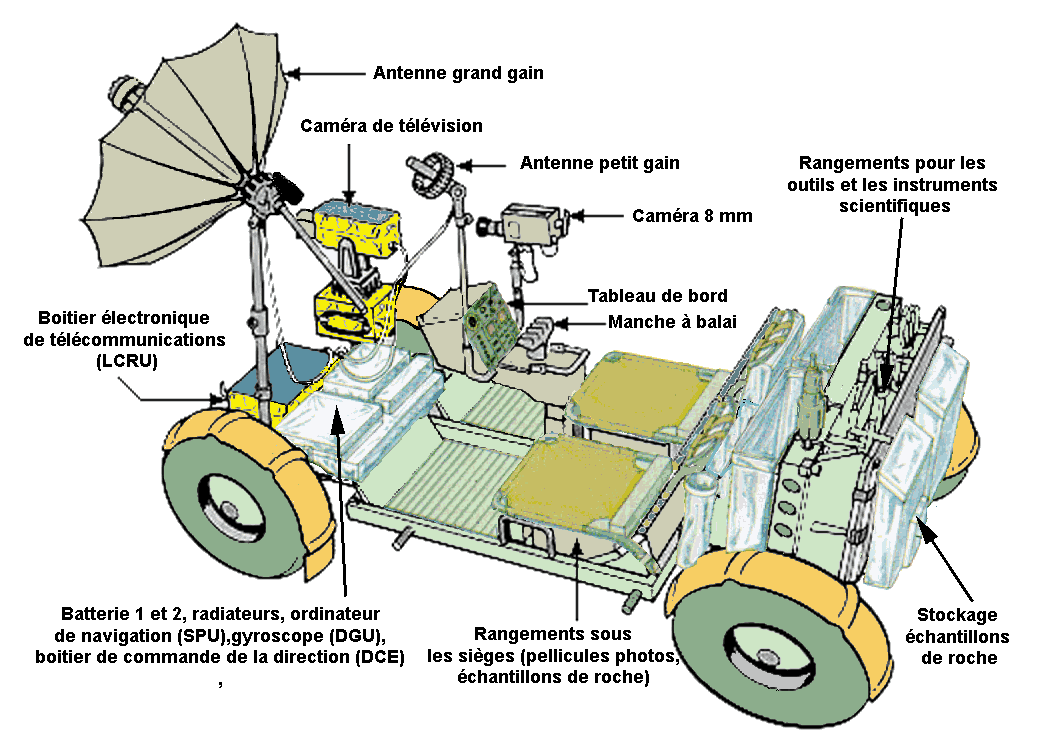
La partie avant du rover reçoit les 2 batteries, les systèmes de communication et de navigation, les caméras ainsi que l'électronique de bord. Sur la partie arrière, prennent place les outils, les sacs à échantillons et les autres équipements scientifiques embarqués.
La partie centrale du rover comporte deux sièges pliables côte à côte en aluminium reposant sur un plancher constitué de panneaux en aluminium. Un appui-bras est monté entre les sièges, qui sont équipés de cale-pieds ajustables ainsi que d'une ceinture de sécurité en Velcro. Un tableau de bord et un manche à balai permettant de diriger le véhicule est situé devant les sièges à égale distance des 2 passagers[21].
Les organes de roulement
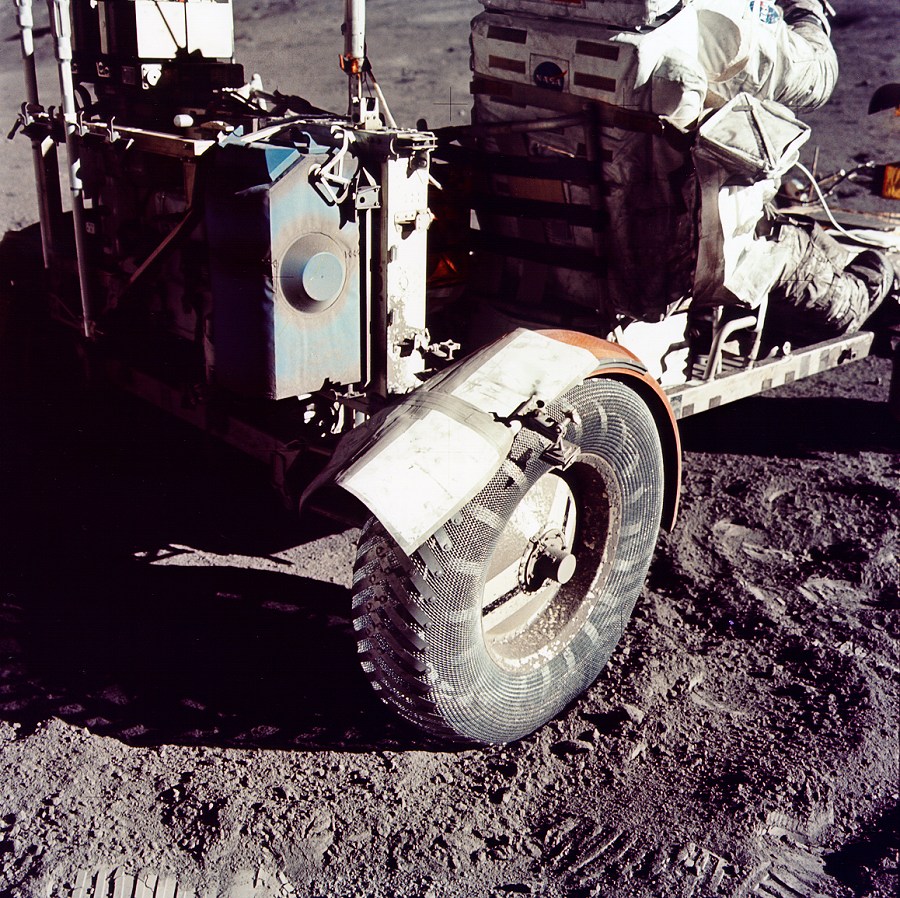
L'utilisation de pneumatiques expérimentée sur la brouette d'Apollo 14 par Goodyear n'avait pas été concluante; la brouette ayant tendance à rebondir. La conception des roues du Rover lunaire adopte une structure novatrice, œuvre du Dr Bekker et son équipe de General Motors, principal sous-traitant de Boeing sur le rover. Les principaux avantages de la conception retenue sont le faible poids et l'efficacité dans les conditions rencontrées sur la surface de la lune[17].
Les roues ont un diamètre extérieur de 81 cm de diamètre (32 pouces), et sont larges de 23 cm (9 pouces). Afin de réduire la masse, les jantes sont en titane et les enjoliveurs en aluminium. Pour permettre une progression plus facile sur la surface poudreuse de la lune, le pneu conventionnel est remplacé par un treillis métallique constitué de cordes à piano tressées[22]. La résille est constituée de 800 fils d'acier zingués à haute résistance de 81,3 cm de long pour 0,8 mm de diamètre. Ils s'entrecroisent tous les 4,7 mm[13]. Un contrôle aux rayons X est réalisé avant le montage de la résille. La bande de roulement de la roue est recouverte sur 50 % de sa surface par des plaquettes en titane rivetées sur la résille[13] et dessinant des chevrons. Ces plaques permettent de mieux transmettre l'effort de traction[23].
Sous la résille, se trouve une deuxième enveloppe plus rigide de 64,8 cm de diamètre qui limite la déformation de l'enveloppe extérieure en cas de gros choc[23]. Cette structure est constituée de 20 bandes cintrées en titane. Chaque roue pèse 5,4 kg et est conçue pour pouvoir rouler au moins 180 km. Chacune coûte 85 000 $[13].
Le système de suspension est élaboré pour absorber les irrégularités du relief lunaire : le châssis est rattaché à chaque roue par une suspension à double triangulation comportant un amortisseur hydraulique à huile pour limiter les mouvements verticaux. Chaque bras (triangle de suspension) est lié au châssis via une barre de torsion (2 barres de torsion par roue)[23].
La motorisation
Le système de propulsion du rover lunaire utilise des moteurs électriques qui doivent satisfaire plusieurs contraintes : couple variable (couple élevé pour franchir les obstacles), vitesse variable (pour maximiser le temps consacré à l'exploration scientifique), rendement élevé pour limiter la consommation électrique et dynamique de freinage. En outre, ces moteurs doivent fonctionner dans le vide qui limite la dissipation de la chaleur[24].
Les quatre roues sont motrices : chaque roue est entraînée par un moteur électrique, développant une puissance de 0,25 ch (0,2 kW) associé à un réducteur de type « harmonic drive » de rapport 1/80. L'ensemble est scellé et rempli d'azote pour lutter contre l'échauffement dans le vide spatial. Un moteur peut être si nécessaire débrayé manuellement laissant la roue libre. Les trains arrière et avant sont tous deux orientables réduisant le rayon de braquage à 3 mètres. Un des trains peut être si nécessaire bloqué dans l'axe. Le braquage des roues est réalisé par de petits moteurs électriques de 0,1 ch placés par paire (pour assurer la redondance) sur chaque essieu et pilotés par un boîtier électronique (le DCE)[25].
Les moteurs sont alimentés par deux batteries zinc-argent non rechargeables. Chacune pèse 27 kg, a une capacité de 121 A/h et délivre le courant sous une tension de 36 volts[14]. Chaque batterie comporte 25 cellules en plexiglas placées dans un boîtier en magnésium : les plaques zinc/argent sont plongées dans une électrolyte à base d'hydroxyde de potassium[26]. Les batteries peuvent être exploitées individuellement ou en parallèle. Une seule batterie est utilisée en opération et dispose d'une capacité suffisante pour alimenter les moteurs durant les trois excursions. La deuxième batterie est présente par sécurité[26]. Les batteries alimentent également les différents boîtiers électroniques qui consomment environ 50 watts lorsque le véhicule est en marche.
La vitesse du rover est limitée à 14 km/h. Mais au cours de la mission Apollo 17, une vitesse de 17,7 km/h fut enregistrée sur les pentes de l'escarpement Lee-Lincoln. Sur le plat, la vitesse maximale est de 10 km/h. L'énergie stockée à bord du Rover lui permet de parcourir 90 km. En pratique, la distance maximale parcourue a été de 35 km durant la mission Apollo 17[26]. Le rover peut gravir et descendre des pentes de 25 % et franchir à petite vitesse un obstacle de 30 cm ou une crevasse de 70 cm[27].
 Gros plan sur le tableau de bord et le manche à balai du rover
Gros plan sur le tableau de bord et le manche à balai du roverL'astronaute dispose pour piloter son véhicule d'un ensemble d'instruments et de commandes situé entre les deux sièges ce qui permet son utilisation par les deux passagers. Les contrôles permettent aux astronautes de diriger leur véhicule, connaître leur position et leur cap (fonction de navigation) et surveiller les principaux paramètres du rover.
Les commandes et le tableau de bord
Le véhicule ne possède pas de volant : il se conduit grâce à un manche à balai en forme de T, plus commode à utiliser avec des mains gantées[21]. L'astronaute fait avancer le LRV en poussant le manche vers l'avant, la vitesse étant proportionnelle à l'inclinaison de celui-ci. En inclinant le manche à gauche ou à droite, le conducteur fait tourner le véhicule. Le freinage s'enclenche lorsque le pilote tire le manche vers l'arrière : ce mouvement a pour effet d'inverser le sens de rotation des moteurs électriques puis, lorsque le manche est en butée, de serrer le frein de parking (frein à tambour sur chaque roue) qui peut retenir le véhicule sur une pente de 35 %. Un bouton situé sur le manche permet de passer en marche arrière c'est-à-dire d'inverser l'action du manche[18].
Un tableau de bord placé devant le manche restitue les principales informations permettant de contrôler la navigation et le fonctionnement du véhicule. Les données fournies sont la vitesse du rover (mesurée par un odomètre située sur la roue droite), la distance parcourue (précision de 100 mètres), la pente et le dévers, le cap suivi (sur une rose graduée de 5° en 5°), la position du module lunaire - relèvement (en degré) et distance (précision de 100 mètres) -, le tension et la charge restante des batteries, la température des batteries et des moteurs électriques de traction. Des commandes sous forme d'interrupteur permettent de mettre le contact, choisir les batteries utilisées, réinitialiser le système de navigation, régler le gyroscope directionnel, activer/désactiver le moteur de traction de chaque roue, activer/désactiver les moteurs permettant de braquer les essieux avant et arrière[28]. Les contrôles relatifs à la navigation sont regroupés dans la partie supérieure du tableau de bord et ceux relatifs au contrôle de la charge des batteries et des températures sont situés dans la partie inférieure[29].
Les astronautes grâce à ce tableau de commandes peuvent faire face aux pannes majeures : passer d'une batterie à l'autre, etc.
Essai de vitesse durant la mission Apollo 16S'orienter sur la Lune est plus difficile que sur Terre car l'absence de magnétisme naturel ne permet pas d'avoir recours à une boussole ou un compas ; de plus la taille réduite de la Lune rapproche l'horizon qui se situe à environ 3 km en terrain plat. Aussi le rover est doté d'un système de navigation relativement sophistiqué.
Celui-ci remplit 2 fonctions : il fournit en permanence la position du Module Lunaire par rapport au rover en indiquant sa distance et sa direction (cap) et par ailleurs il permet aux astronautes de se diriger en fournissant le cap suivi (par rapport au nord lunaire) et la distance parcourue[30]. Toutes ces données sont affichées sur le tableau de bord.
Ces informations sont calculées par un petit ordinateur embarqué, le SPU, alimenté en données par un gyroscope (DG), qui fournit une direction de référence et 4 odomètres placés sur chaque roue qui mesurent la distance parcourue. Au début d'une excursion les occupants du véhicule alignent le gyroscope par une procédure qu'ils peuvent répéter en cours d'excursion en cas de dérive de l'instrument : à cet effet les astronautes utilisent un gnomon qui fournit une mesure de l'azimut du soleil[28],[Note 3].
Durant la phase de conception du rover une étude fut menée pour mesurer le risque couru par l'équipage en cas de mauvais fonctionnement du système de navigation qui concluait à son caractère non critique : avec un rayon d'action limité à 10 km de leur point de départ, un Lem culminant à près de 6 mètres, et le recours possible à une carte détaillée des reliefs il était peu probable que les astronautes aient du mal à retrouver leur base. Aussi le cahier des charges du système demandait une précision de 700 mètres en fin d'excursion[Note 4]. La précision obtenue sur le terrain fut de 100 mètres sans réalignement intermédiaire du gyroscope[31].
Les systèmes de communication
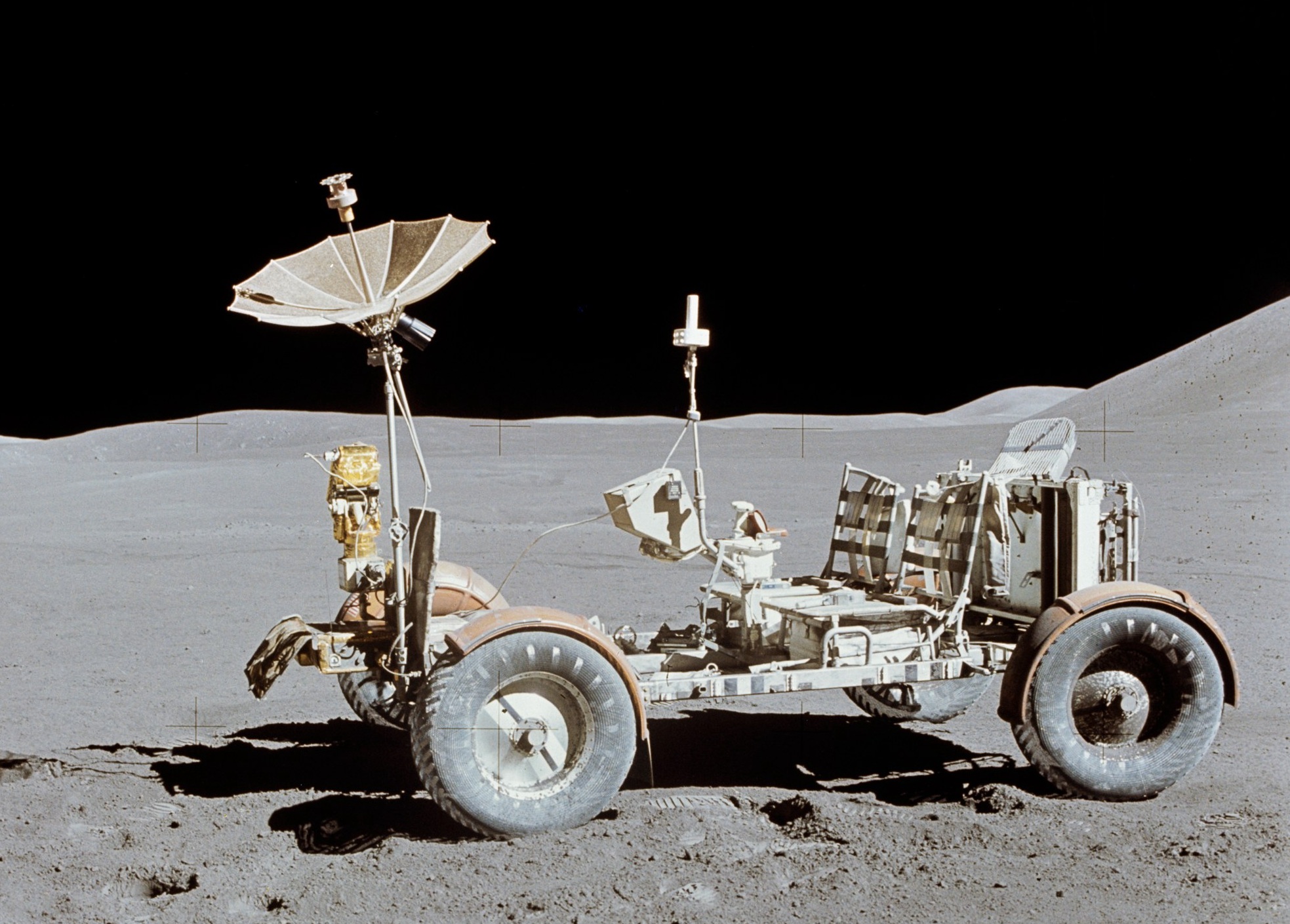
 Le rover d'Apollo 15 garé après sa dernière excursion, les 2 antennes pointées vers le zénith
Le rover d'Apollo 15 garé après sa dernière excursion, les 2 antennes pointées vers le zénithLe rover dispose d'un système de télécommunication permettant aux occupants du rover de dialoguer entre eux ainsi qu'avec la station de contrôle à terre. Des mesures télémétriques, permettant d'effectuer un diagnostic en cas de panne, sont également transmises automatiquement et directement à la station de contrôle. Le rover est également équipé d'une caméra de télévision utilisable à l'arrêt et d'une caméra 8 mm.
La caméra de télévision couleur, installée à l'avant du véhicules, permet aux astronautes de transmettre à l'arrêt des images en temps réel : elle peut être contrôlée à distance depuis la terre[32]. Les contrôleurs de mission ainsi que les scientifiques sur la terre peuvent ainsi assister les cosmonautes dans leur exploration du sol lunaire. L'image est transmise par une antenne à grand gain en forme de parapluie montée sur un mât situé sur l'avant du châssis ; celle-ci doit être réorientée à chaque arrêt par les astronautes vers la terre. Une antenne à petit gain, placée à portée de main des passagers comme la caméra 8 mm prend en charge la transmission des communications. Elle peut être orientée quand le véhicule est en marche. Toutes les télécommunications sont gérées par un boîtier électronique disposant de sa propre batterie placée à l'avant du véhicule.
C'est la première fois qu'une caméra couleur est embarquée dans une expédition lunaire. La caméra CCD (charge coupled device) permet de transmettre des images dans les conditions de luminosité extrêmes qui caractérisent l'environnement lunaire. (Durant la mission Apollo 12, la caméra fut pointée accidentellement vers le Soleil, ce qui la rendit inutilisable pour la suite de la mission)[33]. Son poids n'excède pas les 4,5 kg. Sa résolution atteint les 400 000 pixels. Sa consommation réduite de 13 watts, ses dimensions compactes (101 mm de haut, 165 mm de large et 418 mm de long) et sa robustesse ont permis de l'embarquer à bord du rover. L'objectif, à focale variable, est par ailleurs réglable (de 1 220 mm à 460 mm)[33]. Le signal est transmis au format NTSC (60 hertz et 525 lignes). La lumière qui frappe l'objectif traverse une série de filtres, qui la décompose en 3 images correspondant aux couleurs fondamentales (rouge, vert et bleu), qui sont enregistrées séparément. Sur Terre les images monochromes sont recombinées, pour reconstituer une image en couleur compatible avec les standards des réseaux de télévision commerciaux[33].
Tous les rovers sont abandonnés en fin de mission sur la Lune, non loin du site d'atterrissage[22] et font partie des objets artificiels sur la Lune :
Mission Année Coordonnées géographiques Apollo 15 1971 Apollo 16 1972 Apollo 17 1972 Lors de la mission 17 d'Apollo, grâce au système de téléguidage à distance, la caméra permit au monde entier d'assister, en direct, au décollage du module lunaire qui ramenait les astronautes sur la terre[33].
Le contrôle thermique
 Vue arrière du rover de la mission Apollo 15
Vue arrière du rover de la mission Apollo 15La Lune connaît des températures extrêmes le jour[Note 5] comme la nuit : les températures au sol culminent à 130 °C (-130 °C durant la nuit). Or de nombreux composants du véhicule ne peuvent fonctionner que dans une plage de températures bien précise : les batteries, par exemple, ne peuvent être utilisées que si leur température est comprise entre 4 à 52 °C. Toutefois pour bénéficier de températures plus clémentes les missions Apollo étaient toutes programmées au début de la période éclairée (longue de 354 heures terriennes)[Note 6] : ainsi la température maximum que la mission Apollo 17 dut subir[Note 7] est de 83 °C[34].
Sur la Lune l’absence d’atmosphère ne permet pas d’avoir recours à des systèmes de ventilation classiques. Pour que le rover reste opérationnel, des dispositifs thermiques passifs et semi passifs sont installés sur les organes les plus sensibles : ceux-ci doivent, en particulier, maintenir la température des batteries et des équipements électroniques (gyroscope (DGU), ordinateur de navigation (SPU), boîtier de commande de la direction (DCE)) situés à l’avant du véhicule, limiter l’échauffement du tableau de bord et éviter que l’équipage soit en contact avec des parties du rover porté à des températures trop élevées.
Les composants électroniques et les batteries, organes les plus sensibles, sont enveloppés dans un isolant, composé de 15 couches de mylar aluminisé intercalées avec 14 couches de nylon. L'excès de chaleur du DGU et SPU est transféré par un pont thermique aux batteries qui sont utilisées comme puits thermique. Lorsque la température excède les 45 °C, la chaleur est absorbée par des blocs de paraffine (2 kg en tout) en les faisant fondre.
Des radiateurs situés sur les batteries et sur le DCE, couverts et donc inopérants durant les excursions pour les protéger de la poussière, sont activés (la protection est relevée manuellement) à l'issue des sorties pour dissiper la chaleur par rayonnement. Dès que la chaleur s'est dissipée les protections se remettent automatiquement en place pour éviter une diminution trop importante de la température[35].
La protection thermique des autres parties du rover est réalisée par l'anodisation de certaines pièces métalliques (poignées, repose-pieds, sections tubulaires des sièges, et panneaux centraux et arrière du plancher), l'utilisation de peintures spéciales (tableau de bord), etc.[18]
Sur le terrain, l'action des radiateurs fut fortement contrariée par l'omniprésence de la poussière lunaire qui réduisit et même dans un cas annula complètement la dissipation attendue de l'excès de chaleur entre deux sorties. Au cours d'une excursion de l'équipage d'Apollo 17, le conducteur dut changer de batterie à cause d'une montée en température trop rapide de la batterie utilisée[36].
Le transport et le déploiement sur la lune
 Le Lem d'Apollo 16 : le rover était rangé à droite de l'échelle et de l'écoutille. On distingue à l'extrême droite un des rubans qui a permis de le déployer
Le Lem d'Apollo 16 : le rover était rangé à droite de l'échelle et de l'écoutille. On distingue à l'extrême droite un des rubans qui a permis de le déployerLe Rover lunaire devait pouvoir être logé dans une des baies aux dimensions réduites de l'étage de descente du Lunar Module (LM) du vaisseau Apollo.
La jeep lunaire, occupe un espace de 0,85 m³ situé à droite de l'échelle de descente du Lem : le rover est stocké sur une palette en position verticale le nez en bas dans la baie ; les parties avant et arrière du châssis sont repliées, les roues sont à l'horizontale et les sièges ainsi que les repose-pieds sont rabattus. Grâce à un système de ressorts de barre de torsion et de loquets, il peut être déplié par un seul astronaute qui utilise pour la manœuvre deux rubans de nylon passant par des poulies ; le déploiement est freiné à l'aide de cordes et de bandes de tissu[28]. La procédure est la suivante : un astronaute monte à l'échelle jusqu'au niveau du sas du Lem et déverrouille à l'aide d'un levier le Rover ; le deuxième astronaute situé au sol déclenche ensuite le dépliement pratiquement automatique du rover en tirant sur des rubans de nylon en plusieurs étapes. Le rover est d'abord partiellement incliné ; la partie arrière du châssis et les roues arrière sont déployées puis le rover est incliné jusqu'à ce que sa partie arrière touche le sol ; le déploiement des roues et du châssis avant est alors déclenché puis le reste du rover est abaissé jusqu'au sol. L'astronaute déploie les sièges et les repose-pieds sont dépliés. Enfin les équipements de communication (caméras, antennes et boîtier électronique), stockés dans une autre baie sont montés sur le rover[37].
Le rover à pied d'œuvre
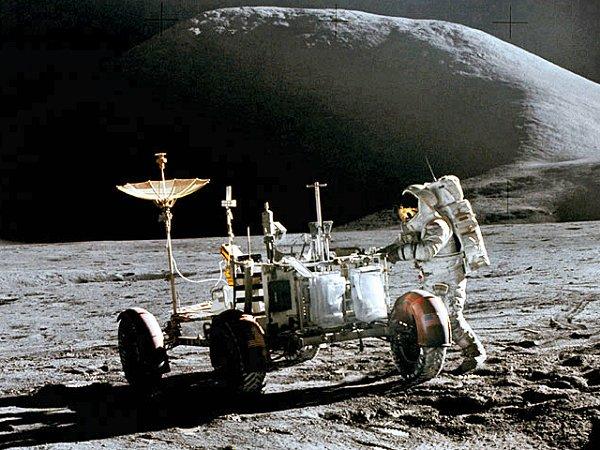
Le rover lunaire est utilisé pour la première fois, le 31 juillet 1971 au cours du vol Apollo 15. Dès cette mission le rover permet aux astronautes d'accroître fortement la distance parcourue par rapport à celle qu'avait réalisé l'équipage d'Apollo 14 : les équipages des précédentes missions étaient limités à de très courts déplacements autour du site d'atterrissage en raison du volume important de la combinaison spatiale et de la faible autonomie de leurs équipements de survie[38].
Chaque mission Apollo va effectuer trois excursions à bord du rover[Note 8] d'une durée comprise entre 2 et 6 heures. La durée et le nombre d'expéditions sont respectivement limités par l'autonomie du système de survie que porte chaque astronaute (7 heures) et par les capacités du module lunaire qui limitent le séjour des astronautes sur la surface de la lune à 54 heures. À chaque excursion les deux astronautes embarquent dans le véhicule avec leur matériel photographique, des outils (foreuse, …) et éventuellement des équipements scientifiques à installer ; en cours de trajet les sites repérés généralement avant la mission pour leur intérêt géologique sont tour à tour explorés et des échantillons de roche sont embarqués tandis que les équipements scientifiques sont installés.
Les pilotes des trois véhicules lunaires sont Scott et Irwin en juillet-août 1971 pour Apollo 15 sur le site Hadley, Young et Duke en avril 1972 pour Apollo 16 sur le site Descartes et Cernan et Schmitt pour Apollo 17 sur les monts Taurus Littrow en décembre 1972 sont[28]. Au total, les trois LRV ont parcouru 91,7 km[39].
mission distance totale temps total d'activité voyage le plus long éloignement maximal du Lem Apollo 15 27,76 km 3 h 02 min 12,47 km 5 km Apollo 16 26,55 km 3 h 26 min 11,59 km 4,5 km Apollo 17 35,89 km 4 h 26 min 20,12 km 7,6 km Premiers tours de roue sur la lune : la mission Apollo 15
 Gros plan sur les réparations du « pare poussière » réalisées en utilisant des cartes assemblées avec du scotch et une pince recyclée (Apollo 17)
Gros plan sur les réparations du « pare poussière » réalisées en utilisant des cartes assemblées avec du scotch et une pince recyclée (Apollo 17)La mission Apollo 15 est la première à utiliser le rover sur la Lune. La puissance de la fusée Saturn V a été augmentée pour pouvoir, entre autres, emmener cette charge supplémentaire[Note 9],[40]. L'autonomie du système de survie emporté par chaque astronaute (le PLSS) durant les sorties sur la Lune, est également passée de 4 heures à 7 heures, pour permettre à l'équipage de profiter de leur rayon d'action accru[41].
Le module lunaire, avec à son bord David R. Scott et James B. Irwin, alunit le 29 juillet 1971 près du sillon Hadley, en laissant comme pour les autres missions Apollo le troisième membre de l'équipage dans le module de commande qui orbite autour de la lune. Le rover n'est mis en œuvre qu'au cours de la deuxième sortie : son déploiement se déroule sans problème notable malgré l'inclinaison du module lunaire qui atteint près de 10°.
Le débriefing de la mission Apollo 15 fournit de nombreuses indications sur les sensations de pilotage du rover : lorsqu'il roule, le rover s'enfonce peu dans la poussière au maximum de 3 à 4 centimètres sur les pentes des reliefs. Le véhicule atteint une vitesse de 10 km/h en trois longueurs. Le freinage perd son efficacité au-dessus de 5 km/h. Au delà de cette vitesse, le véhicule a d'ailleurs tendance à déraper lorsque la direction est braquée. Bien que le véhicule ait évité les passages scabreux (cratères, gros débris), l'enveloppe extérieure d'une roue s'est déformée au point de toucher l'enveloppe intérieure à trois reprises au cours de la première excursion. Le rapport mentionne que dans certaines conditions d'éclairage, l'absence d'ombre entraîne une difficulté à repérer les petits cratères à faible distance et nécessite d'avancer à petite vitesse. la technique pour monter à bord du véhicule qui consistait à sauter en l'air pour retomber sur le siège et qui avait été mise au point par les astronautes lors des simulations de gravité lunaire à bord d'un avion KC-135, s'est avérée efficace[42].
Bilan
Au cours des 3 missions qui le mettent en œuvre (Apollo 15, Apollo 16 et Apollo 17), le rover permet aux astronautes d'accroître considérablement leur rayon d'action - passé de 1 km pour Apollo 14 à 7,6 km pour Apollo 17 - ainsi que la distance totale parcourue - 4 km pour Apollo 14 contre 36 km pour Apollo 17 - bien que le potentiel du véhicule n'ait pas été complètement utilisé pour des raisons de sécurité. Grâce au rover lunaire les astronautes purent prospecter un plus grand nombre de sites permettant d'améliorer notre compréhension de la géologie et de la formation de la Lune[43].
L'astronaute Harrison Schmitt déclare à l'issue de la mission Apollo 17 avec peut-être un peu d'emphase :
« […] Le Rover lunaire s'est avéré être fiable, sûr et flexible. Sans le rover, les grandes découvertes scientifiques d'Apollo 15, 16 et 17 et notre compréhension actuelle de la Lune n'auraient pas été possibles[28]. »Les craintes des responsables du programme, liées au caractère expérimental du véhicule, s'avèrent finalement infondées. Le comportement du véhicule sur le sol lunaire, y compris dans les terrains les plus chaotiques, s'avère remarquable. La consommation électrique est beaucoup plus réduite que prévue. Le système de navigation fournit une position entachée d'une erreur inférieure aux spécifications[39].
Les rovers n'ont connu que des problèmes mineurs qui n'ont jamais entraîné de réduction du programme d'exploration :
- Durant la première mission (Apollo 15) le mécanisme d'orientation du train avant du rover ne répond pas aux commandes (mais le braquage du train arrière reste opérationnel), l'affichage de la tension d'une des batteries ne fonctionne pas et la ceinture de sécurité se révèle mal placée[44].
- Une des batteries du Rover d'Apollo 16 atteint des températures bien supérieures aux prévisions, nécessitant de basculer sur la deuxième batterie[45] la poussière soulevée par les roues atteint l'équipage, le pupitre de commande et le matériel de communication, provoquant des dysfonctionnements. Cet incident découle de la disparition, non détectée, d'une partie du pare poussière de la roue avant gauche[28].
- Lorsque le Rover lunaire de la mission Apollo 17 est mis en marche pour le première fois, les instruments indiquent une tension nulle sur la batterie no 2. Un rapide contrôle des équipements permet de déterminer que le problème provient de l'instrument de mesure du voltage et, de fait, les capacités du véhicule ne sont pas diminuées ; l'incident provoque seulement une perte de données sur l'évaluation des performances de la batterie[46].
Notes
- ↑ Les appellations « Jeep lunaire » ou « buggy lunaire » sont parfois employées.
- ↑ En cas de panne des missions d'exploration pédestres sont planifiées
- ↑ La procédure est la suivante : le rover est placé l'arrière tourné vers le soleil (avec une tolérance de 15°), puis le gnomon situé sur le tableau de bord est déployé et l'angle formé par l'ombre projetée sur une échelle graduée est relevé. L'information est transmise au centre de contrôle sur terre ainsi que l'inclinaison du véhicule selon les 2 axes (pente et devers). Le centre de contrôle déduit de ces informations, grâce aux tables d'éphémérides lunaires et à des formules de calcul, l'angle formé par l'axe véhicule par rapport au nord lunaire et fournit en retour la correction à apporter au gyroscope. Les astronautes règlent l'alignement du gyroscope grâce à une commande située sur le tableau de bord
- ↑ Cette tolérance autorisait une dérive de 10°/heure du gyroscope, en prenant en compte une erreur d'alignement initiale du gyroscope de 3° et les erreurs de mesure des odomètres induites par le patinage des roues dans le sable lunaire
- ↑ La période éclairée du jour lunaire dure environ 354 heures terrestres
- ↑ Durant la longue journée lunaire le soleil s'élève très lentement au-dessus de l'horizon. La température croit au fur et à mesure et atteint son maximum lorsque le soleil culmine au bout de 177 heures terriennes
- ↑ au cours de sa troisième sortie
- ↑ une environ par tranche de 24 heures pour alterner période de repos et d'activité
- ↑ Le poids du module lunaire a énormément cru (2 tonnes) pour emporter plus de consommables afin de permettre l'allongement du séjour sur la lune
Références
- ↑ Burkhalter & Sharpe (1995), p. 199
- ↑ a et b Burkhalter & Sharpe (1995), p. 200
- ↑ Clarke (1953), p. 119
- ↑ Jones & Nola (1971), p. 1
- ↑ Burkhalter & Sharpe (1995), p. 202
- ↑ Burkhalter & Sharpe (1995), p. 201
- ↑ W. David Compton (1989), Project Apollo : the conclusion, Major Issues in Apollo
- ↑ W. David Compton (1989), Setback and recovery : 1967, Lunar Science and Exploration: Santa Cruz, 1967
- ↑ W. David Compton (1989), First phase of exploration completed :Changes for Extended Lunar Missions
- ↑ W. David Compton (1989), Lunar expedition begins : On With Lunar Exploration
- ↑ W. David Compton (1989), First phase of lunar exploration completed : Cutbacks and Program Changes
- ↑ a , b et c Burkhalter & Sharpe (1995), p. 203-204
- ↑ a , b , c , d et e (fr) Paul Cultrera, « LRV Le LRV (Lunar Rover Vehicule pour Jeep lunaire) » sur De la Terre à la Lune
- ↑ a et b (en) Mike Wright, Bob Jaques et Saverio Morea (dir.), A Brief History of the Lunar Roving Vehicule, Huntsville AL, 2002, document du NASA Marshall Space Flight Center History Office no NP-2002-04-82-MSFC [lire en ligne]
- ↑ (en), C. Howell Mullis, A Study and Analysis of the MSFC Lunar Roving Vehicule Dust Profile Test Program [pdf], 1971
- ↑ W. David Compton (1989), Lunar exploration concluded - Lunar Rover and New Experiments
- ↑ a et b Burkhalter & Sharpe (1995), p. 206
- ↑ a , b et c (fr) La Jeep Lunaire
- ↑ (en) Experiment Operations During Apollo EVAs sur Ares NASA
- ↑ Boeing : Description Rover Apollo 17, p. 1
- ↑ a et b (en) Apollo Maniacs LRV: Lunar Roving Vehicle sur Apollo Maniacs
- ↑ a et b General Motors
- ↑ a , b et c Boeing (1972), p. 8
- ↑ Jones & Nola (1971), p. 8
- ↑ Jones & Nola (1971), p. 5
- ↑ a , b et c (fr) Le Lunar Rover Vehicle
- ↑ Boeing : Description du Rover Apollo 17, p. 3
- ↑ a , b , c , d , e et f (en) NSSDC, The Apollo Lunar Roving Vehicle
- ↑ Boeing (1972), p. 11
- ↑ Heffron & LaPiana (1970), p. 1
- ↑ W.G. Heffron et F. LaPiana (1970), p. 45
- ↑ (en) Destination Moon: The LRV sur Piece of Science du Franklin Institute
- ↑ a , b , c et d Buil (1989)
- ↑ Ronald A Creel (2007), p. 10
- ↑ Boeing (1972), p. 16
- ↑ Ronald A. Creel (2007), p. 29-41
- ↑ Boeing (1972), p. 17
- ↑ Taylor et al. (1997), p. 87-89
- ↑ a et b Mike Wright, Bob Jaques et Saverio Morea, p. 18-21
- ↑ W. David Compton (1989), First phase of exploration completed: Changes for Extended Lunar Missions
- ↑ (en) Biomedical Results of Apollo, Extravehicular Mobility Unit sur NASA
- ↑ Débriefing mission Apollo 15, p. 100-105
- ↑ (en)Statistiques des activités extravéhiculaires du programme Apollo, Richard W. Orloff, NASA (2000,2004)
- ↑ Débriefing mission Apollo 15, p. 236-237
- ↑ Burkhalter & Sharpe (1995), p. 212
- ↑ Jones & Nola (1971), p. 6
Annexes
Sources bibliographiques
Ouvrages utilisés comme sources dans la rédaction de l'article :
- (en) Bettye B. Burkhalter et Mitchell R. Sharpe, « Lunar Roving Vehicle: Historical Origins, Development, and Deployment », dans Journal of the British Interplanetary Society, vol. 48, 1995 [texte intégral] Historique du programme rover et description de ses principales caractéristiques
- (en) Boeing, Apollo 17 LRV Technical Information, Houston, 1972 Synthèse des caractéristiques du rover d'Apollo 17 par son constructeur
- (en) Rover Operations Handbook, Boeing, Lunar Rover Operations Handbook, Boeing, 1971 Manuel détaillant les caractéristiques du rover lunaire et l'ensemble des procédures de mise en œuvre (utilisé par les contrôleurs de mission) (document NASA no LS006-002-2H)
- (en) System Handbook Apollo 15, Lunar Roving Vehicle Systems Handbook: Apollo 15, LRV-1, Rev. A, MSC Flight Control Division, 1971 Description et schémas détaillés de tous les composants du rover d'Apollo 15 (utilisé par les contrôleurs de mission) (document NASA no TM X-67465)
- (en) Ronald A Creel, Applying Thermal Control Experiences On The Apollo Lunar Rover Project To Rovers For Future Space Exploration, 2007 Synthèse sur les dispositifs de contrôle thermique et résultats mesurés sur le terrain
- (en) Mike Wright, Bob Jaques et Saverio Morea (dir.), A Brief History of the Lunar Roving Vehicle Technical Editor — As Part of the History of the NASA Marshall Space Flight Center, Huntsville AL, 2002 Historique de la conception du rover lunaire, rôle du Centre Marshall (document NASA no NP-2002-04-82-MSFC)
- (en) NASA, Apollo 15 mission report Debriefing/Compte-rendu exhaustif de la mission Apollo 15 (document NASA no MSC 05161)
- (en) W. David Compton, Where No Man Has Gone Before: A History of Apollo Lunar Exploration Missions, 1989Histoire des missions Apollo (document NASA no Special Publication-4214)
- (en) Nicholas C. Costes, John E. Farmer, Edwin B. George, Mobility Performance of the lunar roving vehicle : Terrestrial studies - Apollo studies, 1972 Evaluation du comportement du rover sur le sol lunaire (document NASA no TR R 401)
Ouvrages utilisés comme sources ponctuelles :
- (en) Nicholus C. Costes, John E. Farmer, Edwin B. George, Mobility performance of the lunar roving vehicke ; terrestrial studies - Apollo 15 results, NASA, Bellcomm, 1972 Comportement routier du rover : simulation et résultats de la mission Apollo 15 (document NASA no TR R-401)
- (en) Lunar Roving Vehicle Crew Equipment Stowage Methods and Location, 1971 Description du matériel transporté dans le rover et de son mode de rangement (document NASA no 729-S-0018(S))
- (en) C.S. Jones et F.J. Nola, Mobility Systems Activity for Lunar Rovers at MSFC, NASA Marshall Spaceflight Center, 1971 Une description des organes moteurs par les ingénieurs du Centre Marshall (document NASA no TM X-64623)
- (en) W.G. Heffron et F. LaPiana, The Navigation System of the Lunar Roving Vehicle, NASA, Bellcomm, 1970 Évaluation du système de navigation (document NASA no TM 70-2014-8)
- (en) Arthur C. Clarke, Expedition to Earth, Ballantine Books, New York, 1953 (ISBN ISBN 0-7221-2423-6)
- (en) Cornelius Ryan (dir.), Wernher von Braun, Willey Ley, Fred Whipple, Conquest of the Moon, Viking Press, New York, 1953
- (en) G. Jeffrey Taylor, Linda M.V. Martel et Brooks G. Bays Jr. (dir.), Exploring the Moon — A Teacher's Guide with Activities for Earth and Space Sciences, 1997, « Lunar Roving Vehicule » (document NASA no EG-1997-10-116-HQ)
- Christian Buil, Astronomie CCD, Société d'Astronomie Populaire, 1989
- (en) Courtesy Ron Creel, Lunar Roving Vehicule Missing Fender Extension Saga, 2005, « Fender Extension »
- (fr)(en)(de)General Motors, Die Alternativen Antriebe von GM, « Die Alternativen Antriebe von GM »
- (en) Anthony Young, « Lunar rovers past and future », dans The space review, 2004 [texte intégral]
Articles connexes
Lien externe

La version du 26 septembre 2008 de cet article a été reconnue comme « bon article », c'est-à-dire qu'elle répond à des critères de qualité concernant le style, la clarté, la pertinence, la citation des sources et l'illustration.  Portail de l’astronautique
Portail de l’astronautique Portail de l’automobile
Portail de l’automobile Portail de l’exploration
Portail de l’exploration
Catégories : Bon article | Conquête de l'espace | Engin spatial | Véhicule historique | Automobile des années 1970 | Programme Apollo





Wikimedia Foundation. 2010.