- Lunar Module
-
Module lunaire Apollo
Module lunaire du programme Apollo 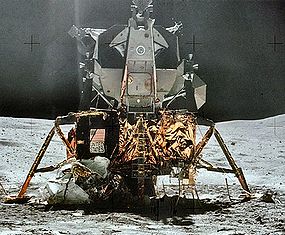
Dimensions Hauteur 7 m Diamètre 4,27 m Empattement 9,45 m Masse totale 15 094 kg / 16 437 kg¹ Volume habitable 6,65 m3 Étage de descente Masse à vide 2 033 kg / 2 792 kg¹ Poussée moteur de descente : 45 040 N (4 477 kg) Ergols : Peroxyde d'azote/Aérozine 50
7 899 kg / 8 355 kg¹Étage de remontée Masse à vide 2 132 Masse totale² 4 889 kg / 4 967 kg¹ Poussée moteur d'ascension : 15 600 N (1 460 kg) Ergols : Peroxyde d'azote/Aérozine 50
2 376 kgPoussée moteurs de contrôle d'attitude x 16: 445 N (45 kg) Ergol : 274 kg Performances Eau 137 litres / 225 l (39 l dans étage de remontée)¹ Énergie électrique 2 280 A-h / 2 667 A-h (592 A-h dans étage de remontée)¹ Autonomie 35 h / 67 h¹ Delta v descente 2 470 m/s
montée 2 220 m/s¹ À partir d'Apollo 15 ²Au décollage de la Lune
Source : Apollo by the numbers NASA ref SP-2000-4029 John Houbolt expliquant le scénario du LOR qu'il réussit à promouvoir non sans difficulté
John Houbolt expliquant le scénario du LOR qu'il réussit à promouvoir non sans difficulté
Le module lunaire ou LEM (pour Lunar Excursion Module) ou LM (pour Lunar Module)[N 1] est le véhicule spatial utilisé dans le cadre du programme spatial américain Apollo (1961-1972) pour débarquer des hommes sur la Lune. Son rôle est de faire atterrir sur la Lune deux des trois membres d'équipage du vaisseau Apollo avec des équipements scientifiques, de leur permettre d'y séjourner de deux à quatre jours avant de décoller pour rejoindre le Module de Commande et de Service (CMS) resté en orbite lunaire et chargé de ramener l'équipage sur Terre.
Lorsque en 1961 le président des États-Unis, John Fitzgerald Kennedy, fixe comme objectif à l'agence spatiale américaine d'envoyer des hommes sur la Lune avant la fin de la décennie, le programme spatial américain est encore balbutiant. Après avoir étudié plusieurs configurations pour le vaisseau spatial, la NASA choisit en 1962 d'avoir recours au LEM, module dédié au débarquement sur la Lune, malgré les interrogations que suscitent à cette époque le recours au rendez-vous orbital lunaire (LOR) que sous-tendait ce choix. Seule cette solution permettait en effet de tenir l'échéance fixée, en réduisant la masse à satelliser et en limitant les coûts et les risques techniques.
Le LEM comporte deux étages : un étage de descente dont le rôle principal est de faire atterrir verticalement le module lunaire grâce à un moteur à poussée variable et un étage de remontée doté de son propre moteur et dans lequel se situe la cabine pressurisée où séjournent les astronautes. Malgré la complexité de sa mission et une contrainte de masse très sévère (15 tonnes), le LEM a réussi à cinq reprises à amener sans défaillance grave et faire séjourner 2 hommes dans un environnement lunaire particulièrement hostile et à l'époque mal connu.
La conception et la construction du module lunaire ont été réalisées sous la maîtrise d'œuvre de la société aérospatiale Grumman entre 1962 et 1969. Quinze modules lunaires ont été construits, dont dix ont volé et six atterri sur le sol lunaire au cours de la période 1969-1972. Le module lunaire de la mission Apollo 13 a permis de sauver l'équipage en se substituant au Module de Commande et de Service défaillant. Le programme Constellation qui doit permettre de débarquer des hommes sur la Lune à l'horizon 2020 a d'ailleurs repris une grande partie des solutions développées pour le LEM.
Contexte : le choix du rendez-vous orbital lunaire (1961-1962)
Article détaillé : programme Apollo. Scénario du vol direct : maquette du vaisseau spatial qui devait se poser sur la lune (NASA en 1962). Les modules de commande et de service perchés en haut donnent l'échelle.
Scénario du vol direct : maquette du vaisseau spatial qui devait se poser sur la lune (NASA en 1962). Les modules de commande et de service perchés en haut donnent l'échelle.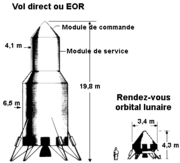 Comparaison des tailles de véhicules lunaires selon la méthode retenue (la taille dans le mode LOR est sous-estimée)
Comparaison des tailles de véhicules lunaires selon la méthode retenue (la taille dans le mode LOR est sous-estimée)En 1959, l'agence spatiale américaine lance des études dans une perspective à long terme pour déterminer les techniques permettant d'envoyer des hommes sur la Lune. Trois scénarii principaux se dégagent[1] :
- L'envoi direct d'un vaisseau sur la Lune (Direct Ascent) ; une fusée de forte puissance, de type Nova, propulse le vaisseau complet (véhicule lunaire et vaisseau utilisé pour le retour sur Terre) vers la Lune ; l'ensemble atterrit sur la Lune puis en redécolle avant de retourner sur la Terre.
- Le rendez-vous orbital autour de la Terre (EOR Earth-Orbit Rendez-vous) : pour limiter les risques et le coût de développement de la fusée géante que nécessite le premier scénario, les composants du vaisseau sont envoyés en orbite terrestre par 2 fusées (ou plus) moins puissantes. Ces différents éléments sont assemblés en orbite par des astronautes qui utilisent éventuellement une station spatiale comme base logistique. Le déroulement du vol du vaisseau, par la suite, est similaire à celui du premier scénario.
- Le rendez-vous orbital autour de la Lune (LOR pour Lunar Orbital Rendez-vous) : une seule fusée est requise mais le vaisseau envoyé vers la Lune comporte 2 sous-ensembles qui se séparent une fois que l'orbite lunaire est atteinte : le module dit lunaire atterrit avec une partie de l'équipage sur la Lune et en redécolle pour ramener les astronautes jusqu'au module dit de commande, resté en orbite autour de la lune, qui prend en charge le retour des astronautes à Terre. Cette solution permet d'économiser du poids par rapport aux 2 autres scénarii (beaucoup moins de combustible est nécessaire pour l'atterrissage et le décollage) et permet de concevoir un vaisseau optimisé pour l'atterrissage et le séjour sur la Lune. La fusée à développer est moins puissante que celle requise par le premier scénario.
Lorsque le président américain John Kennedy donne à la NASA le 25 mai 1961 l'objectif de faire atterrir des hommes sur la Lune avant la fin de la décennie, l'évaluation de ces 3 méthodes, est encore peu avancée. La NASA n'a pas encore réalisé un seul véritable vol spatial habité (le premier vol orbital de la capsule Mercury n'a lieu qu'en septembre 1961)[N 2]. L'agence spatiale a du mal à évaluer l'ampleur des difficultés soulevées par les rendez-vous entre engins spatiaux et elle ne maîtrise pas l'aptitude des astronautes à supporter de longs séjours dans l'espace et à y travailler ; ses lanceurs ont essuyé une série d'échecs, ce qui l'incite à la prudence dans ses choix techniques. La NASA est consciente que le choix de la méthode conditionne les caractéristiques des véhicules spatiaux et des lanceurs à développer, et que tout retard pris dans cette décision pèse sur une échéance très proche, compte tenu des défis techniques à relever. Mais les responsables de la NASA vont mettre plus d'une année, passée en études et en débats, avant de sélectionner un des trois scénarios.
Le LOR est initialement la solution qui a le moins de partisans malgré les arguments détaillés avancés par son plus ardent défenseur John C. Houbolt du Centre de Recherche de Langley. Aux yeux de beaucoup de spécialistes et responsables de la NASA, le rendez-vous autour de la Lune entre module lunaire et module de commande paraît instinctivement trop risqué : si le rendez-vous échoue, les astronautes occupant le module lunaire n'ont pas le recours de freiner leur engin pour se laisser redescendre sur la Terre : ils sont condamnés à tourner indéfiniment autour de la Lune. Les avantages de ce scénario, en particulier le gain sur la masse à satelliser (45 tonnes avec le LOR contre 70 tonnes en vol direct), sont rejetés sans étude sérieuse. Houbolt, désespéré, envoie à deux reprises un courrier à Robert Seaman le numéro deux de la NASA, en lui demandant d'intervenir pour que la méthode qu'il préconise soit étudiée sur le fond et non pas rejetée sur la base d'idées préconçues. En procédant ainsi il court-circuitait plusieurs niveaux hiérarchiques et mettait en grand danger son avenir à la NASA[2],[N 3]. Toutefois, au fur et à mesure que les autres scénarios sont approfondis le LOR gagne en crédibilité : les partisans du vol direct - Max Faget et ses hommes du Centre des Vols Habités - se rendent compte de la difficulté de faire atterrir un vaisseau lourd sur le sol irrégulier et aux caractéristiques incertaines de la Lune[3]. Wernher von Braun et l'équipe qu'il dirige au Centre de vol spatial Marshall, partisan d'un rendez-vous orbital terrestre finit lui-même par être convaincu que le choix du LOR est le seul qui permettra de tenir l'échéance fixée par le président Kennedy[3]
Au début de l'été 1962, alors que les principaux responsables de la NASA se sont tous convertis au scénario du rendez-vous orbital lunaire, leur choix se heurte au véto de Jerome B. Wiesner conseiller scientifique du président Kennedy. Finalement, la solution du LOR est, malgré tout, entérinée le 7 novembre 1962[4]. Dès le 25 juillet, 11 sociétés aérospatiales américaines sont sollicitées pour la construction du module lunaire sur la base d'un cahier des charges établi par la NASA. Celui-ci énonce dans ses grandes lignes les caractéristiques du module lunaire à fabriquer - type de propergol, durée de la mission (2 jours), taille de l'équipage (2 personnes), nombre d'écoutilles, présence d'un système de navigation et de pilotage - ainsi que le déroulement d'une mission type. Une partie des fournitures est supervisée directement par la NASA (l'ordinateur de navigation, les scaphandres, les expériences scientifiques). La sécurité de l'équipage doit être assurée avec un taux de 99,9 %, tandis que le taux de fiabilité du LEM est fixé à 99,5 %[5].
Une phase de conception laborieuse (1963-1964)
 Le Centre spatial Marshall de la NASA Houston assiste Grumman dans la phase de conception et réalise les tests de réception
Le Centre spatial Marshall de la NASA Houston assiste Grumman dans la phase de conception et réalise les tests de réception Manuel de familiarisation distribué par le maître d'œuvre Grumman à ses employés (1964)
Manuel de familiarisation distribué par le maître d'œuvre Grumman à ses employés (1964)Le 7 novembre 1962, la société Grumman[N 4] remporte l'appel d'offres. Ce constructeur américain du célèbre chasseur embarqué (Hellcat et, par la suite, du F14) avait, jusque là, soumissionné sans succès à plusieurs appels d'offres de la NASA. Grumman tient à pénétrer le marché de l'aérospatiale et avait mobilisé une importante équipe d'ingénieurs pour travailler à la conception du futur module lunaire avant même le lancement de l'appel d'offres.
L'interlocuteur de Grumman au sein de la NASA sera le Centre des Vols Habités de la NASA (Manned Spacecraft Center ou MSC) qui vient d'emménager au Centre Spatial de Houston (aujourd'hui Centre Spatial Lyndon B. Johnson ou JSC). Ce dernier doit assister Grumman dans la phase de spécifications et a en charge la qualification du module lunaire. Après un round de négociations, destiné à figer la distribution des tâches et des procédures, la rémunération de Grumman est fixée à 385 millions $ incluant un bénéfice de 25 millions pour Grumann, bien que les contractants n'aient, à l'époque, qu'une idée peu précise de l'engin à construire[4].
Le projet part avec un handicap d'un an par rapport aux autres composants du programme Apollo, notamment le CSM. Début 1963, les ingénieurs de Grumman, basés à Bethpage, Long Island (État de New York), commencent à travailler sur l'architecture générale du module lunaire. Au cours des premiers échanges avec la NASA, on évoque un vaisseau spatial de 3 mètres de diamètre et de 4,5 mètres de haut pesant environ 11 tonnes comportant une partie habitable de la taille et de la forme d'une cabine d'hélicoptère[6].
Un étage de remontée profondément remanié
Au fur et à mesure de l'avancement des études beaucoup de ces caractéristiques vont être remises en question.
Les hublots qui reprenaient, dans la proposition de départ, la disposition bombée d'une cabine d'hélicoptère pour procurer la vision la plus complète au pilote (ce qui était jugé essentiel pour les manœuvres délicates d'atterrissage et de rendez-vous) voient leur taille se réduire, pour des raisons de rigidité structurelle et de contrôle thermique, à 2 petits triangles de verre inclinés vers le bas représentant 10 % de la surface initiale.
Deux possibilités d'arrimage au module de commande et de service Apollo étaient prévues : une écoutille placée au sommet de l'étage de remontée devait être utilisée avant le débarquement sur la Lune, tandis que l'écoutille située sur la face avant était utilisée au retour lors du rendez-vous orbital lunaire pour permettre au pilote de contrôler visuellement son approche à travers les hublots : finalement, pour gagner en poids (s'il y a arrimage, il faut un tunnel et des renforts structurels), un petit hublot est ajouté dans la partie supérieure de l'étage de remontée permettant d'utiliser également l'écoutille supérieure au retour[7].
Les ergols utilisés par les moteurs de remontée ont une masse différente. Chaque type d'ergol est réparti dans deux réservoirs pour permettre une répartition symétrique de la masse. Ce schéma retenu pour l'étage de descente est abandonné dans l'étage de remontée : chaque type d'ergol sera stocké dans un seul réservoir. La distance entre chaque réservoir et l'axe de poussée sera différente pour ne pas déséquilibrer le vaisseau. Cette disposition donne une apparence nettement dissymétrique à la silhouette de l'étage de remontée[8].
Pour économiser le poids et le volume de la cabine, les sièges des astronautes sont remplacés par de simples harnais qui maintiennent les astronautes dans les phases d'impesanteur ou de forte accélération : cette solution, viable dans le contexte de gravité généralement nulle ou faible de la mission, est acceptée par les astronautes ; elle permet au pilote, plus proche du hublot (dans une position de conducteur de tramway dit l'astronaute Conrad), d'avoir une meilleure visibilité sur l'extérieur[7].
Des essais dans un environnement simulant la gravité lunaire remettent en cause le dessin de l'écoutille avant ainsi que la méthode proposée pour la descente sur le sol lunaire (une corde). On donne alors une forme carrée à l'écoutille (elle était ronde à l'origine), et on l'agrandit fortement pour que les astronautes puissent passer sans encombre ; une plate-forme est ajoutée devant l'écoutille ainsi qu'une échelle à son aplomb portée par une des jambes du train d'atterrissage[9].
Deux solutions sont étudiées pour le positionnement des équipements : à l'intérieur de la cabine pressurisée, à portée de main des astronautes, ou à l'extérieur. La solution retenue est un compromis : une partie des équipements est logée à l'extérieur de la cabine pressurisée (essentiellement sur la face arrière). Le vaisseau ne doit voler que dans le vide spatial : les ingénieurs en tirent les conséquences et éliminent dans la forme extérieure tout ce qui relève d'une recherche d'aérodynamisme et accroît le volume pressurisé. La forme résultante, peu esthétique vaut au module lunaire les surnoms de « punaise » (bug) et « araignée » (spider).
Ces modifications ainsi que d'autres non citées donnent à la cabine des formes si torturées que, dans certains cas, les ingénieurs de Grumman choisissent d'assembler les éléments de la structure du LEM par rivetage (au lieu de la soudure) au grand mécontentement des représentants de la NASA qui émettront longtemps des doutes sur l'étanchéité de la cabine pressurisée[8].
Début mai 1963 plusieurs caractéristiques importantes ne sont toujours pas définies et la masse du module lunaire continue de croître. Toutefois, l'évolution prévisible de la puissance de la fusée Saturn V donne de la marge puisque celle-ci peut désormais emporter un module lunaire de 13 tonnes contre les 9 tonnes prévues au lancement de l'appel d'offres.
Le sol lunaire, cet inconnu
La configuration du train d'atterrissage est l'objet de nombreux débats car les ingénieurs ne disposent jusqu'en 1966 d'aucune donnée précise sur la consistance du sol lunaire[N 5]. Dans le doute, la NASA modifie ses spécifications initiales en demandant à Grumman de faire passer la taille des semelles situées à l'extrémité des jambes du train d'atterrissage de 22 à 91 cm de diamètre. Mais dans cette nouvelle configuration le LEM ne tient plus dans le carénage qui doit l'accueillir au sommet de la fusée Saturn V : il faut donc prévoir un train d'atterrissage articulé qui ne sera déplié qu'une fois le module lunaire extrait de son carénage. Pour des raisons d'encombrement également le nombre de jambes passe de cinq à quatre après avoir envisagé de le réduire à trois. Cette dernière solution est écartée car elle aurait condamné à mort les astronautes en cas de rupture d'une jambe à l'atterrissage[7].
Des moteurs complètement nouveaux
 Moteur de l'étage de remontée
Moteur de l'étage de remontée Le LGC ordinateur également présent dans le module de commande
Le LGC ordinateur également présent dans le module de commandeLe module lunaire doit disposer de deux moteurs-fusée de conception nouvelle (1 par étage) et de 16 petits moteurs de contrôle d'attitude regroupés par grappes de quatre et situés sur l'étage de remontée.
Le moteur de l'étage de descente a des caractéristiques qui en font sans doute la plus grande innovation technique de tout le projet Apollo dans le domaine des moteurs : pour pouvoir poser le LEM sur la Lune, la poussée du moteur doit être à la fois orientable (de 6° maximum[10] par rapport à l'axe vertical) et surtout modulable entre 4,7 et 43,9 kN[N 6],[10]). Pour limiter le risque, Grumman demande à 2 industriels de construire un prototype en se proposant de sélectionner à l'échéance le projet le plus abouti : la société Rocketdyne propose de moduler la poussée grâce à l'injection d'un flux d'hélium tandis que Space Technology Laboratories (STL) choisit de faire varier le débit de carburant grâce à des vannes et un injecteur à superficie variable. Début 1965 les deux fabricants ont obtenu des résultats sensiblement identiques : Grumman sélectionne Rocketdyne mais la NASA intervient et impose le choix de STL pour que Rocketdyne puisse se concentrer sur les développements que cet industriel mène dans le cadre du programme Gemini[11].
Une électronique complexe
Lorsque le projet Apollo est lancé, la NASA estime nécessaire que l'équipage puisse calculer les paramètres complexes du vol sans dépendre des moyens de calcul situés sur Terre : en orbite autour de la Lune, il faut en effet composer avec le temps de latence entre deux échanges Terre-Lune (3 secondes pour l'aller retour), la nécessité de réagir rapidement dans la phase de descente vers le sol lunaire, les problèmes de communication qui peuvent survenir, etc[12]...
Pour répondre à ce besoin il est prévu que le module lunaire dispose d'un système de navigation et de pilotage complexe(le Primary Guidance, Navigation and Control System PGNCS) construit autour d'une centrale à inertie et d'un ordinateur (le LGC Lem Guidance Computer). Ce dernier prend en charge, grâce à des programmes de navigation élaborés, à la fois la détermination de la position du LEM dans l'espace, le calcul de la trajectoire à suivre et le pilotage automatique (force et direction de la poussée des moteurs).
La NASA, qui suit directement cette fourniture exige que le système fourni par le Massachusetts Institute of Technology (MIT) et installé dans le Module de Commande soit repris dans le LEM malgré une évaluation négative de Grumman. Le MIT avait l'expérience d'ordinateurs embarqués à bord de sondes spatiales et plus récemment du missile Polaris[12]. La première version du LGC fabriquée en 1963 est d'ailleurs une extrapolation de celui utilisé dans les missiles Polaris. Pour diminuer le poids et accélérer le temps de traitement, le MIT choisit de remplacer les transistors par des circuits intégrés. La fabrication des circuits intégrés à l'époque vient tout juste d'être lancée (1961) et leur fiabilité n'a pas encore pu être prouvée[N 7]. Le MIT achète à cette époque 60 % de la production mondiale pour les besoins des ordinateurs des vaisseaux Apollo[13]. La mise au point du système de Navigation et de Pilotage fortement interfacé avec d'autres sous-systèmes du LEM est longue et difficile : il faudra que la NASA s'implique fortement dans les relations entre le fabricant du LEM et son sous-traitant MIT pour que les principaux problèmes soient aplanis dans les délais impartis[14].
L'autonomie théorique procurée par le système de navigation et de pilotage sera fortement réduite lorsque les missions Apollo seront élaborées : c'est le contrôle au sol à Houston qui fournira en réalité les principaux paramètres tels que la position du LEM ainsi que le vecteur de la poussée avant chaque allumage des moteurs. Houston dispose au moment des premiers vols vers la Lune de moyens de calcul plus puissants et, grâce à la télémétrie, connaît parfaitement la position des vaisseaux et leur trajectoire. Une fois une phase de vol engagée, c'est toutefois à l'ordinateur de bord d'appliquer les corrections nécessaires en se basant sur ses capteurs et ses capacités de calcul. Par ailleurs, l'ordinateur joue un rôle essentiel pour le contrôle des moteurs (fonction autopilote) et gère de nombreux sous-systèmes ce qui lui vaut le surnom de quatrième homme de l'équipage[12]. Sans l'ordinateur, les astronautes n'auraient pu poser le LEM sur la Lune car lui seul pouvait optimiser suffisamment la consommation de carburant pour se contenter des faibles marges disponibles[15].
Il est prévu que le LEM dispose de deux radars l'un utilisé pour l'atterrissage l'autre pour le rendez-vous avec le CSM. La NASA va longtemps hésiter pour des raisons de poids et de performance, entre l'installation d'un radar de rendez-vous et un système purement optique[16].
Fiabilité
La NASA est, dès le lancement du programme Apollo, très sensible aux problèmes de fiabilité. L'envoi d'astronautes sur la Lune est une entreprise beaucoup plus risquée que les vols spatiaux autour de la Terre. Pour les missions en orbite terrestre, en cas d'incident grave, le retour est assuré relativement facilement par une brève poussée des rétrofusées. Une fois en orbite lunaire ou, cas encore plus délicat, sur le sol lunaire, le retour des astronautes sur Terre nécessite que les principaux sous-systèmes du module lunaire ne connaissent aucune défaillance. Ces objectifs font du module lunaire un système complexe donc susceptible d'avoir un taux de panne élevé.
Comme sur le module de service, les ergols liquides retenus pour les moteurs sont hypergoliques, c'est-à-dire qu'ils s'enflamment spontanément quand ils sont mis en contact et ne sont pas à la merci d'un système d'allumage défaillant. Leur mise sous pression est effectuée classiquement grâce à de l'hélium supprimant le recours à une fragile turbopompe. Il n'est à l'époque pas du tout envisagé de recourir aux carburants cryogéniques (Oxygène/Hydrogène) plus performants mais dont le stockage et la mise en œuvre auraient été beaucoup plus délicats.
Pour parvenir au taux de fiabilité visé, la NASA envisage d'abord de donner aux astronautes la possibilité de réparer les composants défaillants. Mais ce choix suppose de les former à des systèmes nombreux et complexes, d'emporter des outils et des pièces de rechange et de rendre accessibles les composants à réparer ce qui les rend vulnérables à l'humidité et à la contamination. La NASA renonce à cette solution en 1964[16] et décide d'intégrer dans la conception du vaisseau des solutions de contournement fournissant une alternative pour chaque anomalie susceptible de se produire. En cas de panne de sous-systèmes complets jugés vitaux, des systèmes de secours doivent pouvoir prendre le relais dans un mode plus ou moins dégradé. Ainsi le système de navigation (ordinateur + système inertiel) dispose d'un système de secours développé par un autre constructeur pour éviter qu'une même faille logicielle mette en panne les deux systèmes. Les 4 groupes de moteurs de contrôle d'attitude sont regroupés par paires indépendantes, chacune d'entre elles pouvant couvrir le besoin en mode dégradé. Le système de régulation thermique est doublé. Les circuits d'alimentation électrique sont également doublés. L'antenne de télécommunications en bande S peut être remplacée par deux antennes plus petites en cas de défaillance. Il n'y a néanmoins pas de parade à une panne de moteur : seuls des tests poussés avec un maximum de réalisme peuvent permettre d'atteindre le taux de fiabilité attendu. Des solutions techniques conservatrices mais éprouvées sont dans certains cas retenues : c'est le cas de l'énergie électrique (choix des batteries), des systèmes pyrotechniques (choix de systèmes existants standardisés et éprouvés) ainsi que l'électronique de bord (les circuits intégrés, bien qu'acceptés dans les ordinateurs, ne sont pas retenus pour le reste de l'électronique).
Selon Neil Armstrong, les responsables du projet avaient calculé qu'il y aurait environ 1 000 anomalies à chaque mission Apollo (fusée, CSM et LEM), chiffre extrapolé du nombre de composants et du taux de fiabilité exigé des constructeurs. Il y en aura, en fait en moyenne 150[N 8] ce que Armstrong attribue à l'implication exceptionnellement forte des personnes ayant travaillé sur le projet[17]. Aucune des pannes du LEM n'empêcha les équipages Apollo de remplir leurs principaux objectifs.
La validation de la conception
Pas moins de cinq maquettes plus ou moins complètes sont réalisées par Grumman entre 1963 et 1964 (la dernière M5 en octobre 1964) pour mettre au point et faire valider par la NASA les spécifications du Module Lunaire[18].
Fabrication et tests (1965-1967)
La fabrication des modules lunaires démarre en 1965. Elle porte à la fois sur des modules opérationnels et des versions utilisées pour des tests au sol et en vol. La construction du module lunaire rencontre de graves problèmes de délai, de surpoids et de qualité qui menacent le programme Apollo tout entier. Certain tests en vol devront être repoussés mais l'incendie de la capsule du Module de Commande d'Apollo 1, en repoussant l'échéance, permettra au LEM d'être prêt à temps.
Modules lunaires fabriqués
Quinze modules lunaires seront construits. Sur ce nombre deux d'entre eux ne voleront pas (les LM-2 et LM-9), les trois derniers resteront inachevés à la suite de l'interruption du programme Apollo (les LM-13, LM-14 et LM-15), trois seront utilisés pour les tests en vol (les LM-1, LM-3 et LM-4), enfin le LM-7 ne s'est jamais posé sur la lune à la suite de l'interruption de la mission Apollo 13. Par ailleurs 6 LEM seront construits pour les tests au sol (LTA : Lunar Module Article) : le LTA-2 pour les tests de vibration, le LTA-10 utilisé pour les tests de comptabilité avec la fusée Saturne, le LTA-1 à usage interne, le LTA-8 pour les tests thermiques et d'exposition au vide et enfin les LTA-3 et LTA-5 sur lesquels sont effectués les tests structuraux combinés de vibrations, accélérations et essais moteurs[19]. Deux simulateurs statiques sont également fabriqués par Grumman[6].
Modules lunaires utilisés par les missions habitées Code Nom Mission Apollo Date lancement Localisation actuelle LM-3 Spider Apollo 9 3/3/1969 S'est désintégré lors de sa rentrée dans l'atmosphère terrestre. LM-4 Snoopy Apollo 10 18/5/1969 L'étage de descente s'est écrasé sur la Lune; l'étage de remontée est en orbite autour du Soleil. LM-5 Eagle Apollo 11 16/7/1969 L'étage de descente est posé sur la lune; L'étage de remontée, laissé en orbite autour de la Lune, s'est finalement écrasé sur celle-ci. LM-6 Intrepid Apollo 12 14/11/1969 L'étage de descente est posé sur la lune; L'étage de remontée s'est écrasé volontairement sur la Lune. LM-7 Aquarius Apollo 13 11/4/1970 S'est désintégré lors de sa rentrée dans l'atmosphère terrestre. LM-8 Antares Apollo 14 31/1/1971 L'étage de descente est posé sur la lune; L'étage de remontée s'est écrasé volontairement sur la Lune. LM-10 Falcon Apollo 15 26/7/1971 L'étage de descente est posé sur la lune; L'étage de remontée s'est écrasé volontairement sur la Lune. LM-11 Orion Apollo 16 16/4/1972 L'étage de descente est posé sur la lune; l'étage de remontée laissé en orbite autour de la Lune s'est finalement écrasé sur celle-ci. LM-12 Challenger Apollo 17 7/12/1972 L'étage de descente est posé sur la lune; L'étage de remontée s'est écrasé volontairement sur la Lune. Dépassements budgétaires
 Maquette du module lunaire LTA-2R en cours d'installation sur Apollo 6 pour tester en vol le comportement dynamique de sa structure.
Maquette du module lunaire LTA-2R en cours d'installation sur Apollo 6 pour tester en vol le comportement dynamique de sa structure. Le LEM d'Apollo 15 sur la Lune avec le rover lunaire
Le LEM d'Apollo 15 sur la Lune avec le rover lunaireDébut 1965[N 9] les principales interrogations concernant la conception sont levées. La fabrication de sous-ensembles du LEM et les tests sont lancés. Mais le projet se heurte à des problèmes de dépassement budgétaire, de management et de méthodologie de test.
Cette année-là, le programme Apollo dans son ensemble doit faire face à une décrue budgétaire programmée. Or les coûts des différents modules sont en train d'exploser. La NASA renégocie avec Grumman un contrat comportant des clauses incitant le fabricant à rester dans l'enveloppe budgétaire dédiée au module lunaire qui est désormais, tous intervenants confondus, fixée à 1,42 milliard de dollars[19].
Un problème de surpoids
En 1965 les concepteurs du module lunaire n'ont encore qu'une idée imprécise du poids final de l'engin mais la limite des 13,3 tonnes imposée par les capacités de la fusée Saturn V est rapidement dépassée. Des mesures ponctuelles comme l'abandon du radar de rendez-vous au profit d'un système optique (mais un veto des astronautes imposera in fine l'installation du radar), n'étaient pas suffisantes. Le module lunaire, malgré un relèvement de la masse autorisée à 14,85 tonnes début 1965, est de nouveau en surpoids. Thomas J. Kelly, chef du projet chez Grumman, conscient que le LEM dans sa version finale, risque de ne pas répondre aux contraintes de masse, lance au cours de l'été 1965 un programme dédié à la chasse aux excédents de poids. L'allègement des structures ne va permettre de n'économiser que 50 kg ; une masse de 1 100 kg est gagnée, en grande partie en remplaçant les boucliers thermiques rigides situés près des moteurs par un millefeuille constitué de couches alternées d'aluminium et de mylar. Mais ces allègements, en fragilisant la structure, rendront la construction et la manipulation du LEM très délicate[20].
Un planning tendu
Grumman rencontre de nombreux problèmes de fabrication qui affectent le planning de livraison : le suivi des nombreux sous-traitants n'est pas assez serré, les tests réalisés se révèlent insuffisants compte tenu de la complexité du véhicule. La mise au point du moteur de descente rencontre des problèmes graves (érosion du divergent), que le constructeur n'arrive pas à corriger. Fin 1966 les LM 1 et 2 sont en cours de test chez le constructeur tandis que les LM3 à LM7 en sont à différents stades de fabrication[21].
En 1967 et jusqu'à juin 1968 le moteur de l'étage de remontée conçu par Bell a des problèmes de stabilité qui incite la NASA à faire développer un nouvel injecteur par la société Rocketdyne[22].
Des problèmes de qualité
L'incendie de la capsule Apollo 1 (27 janvier 1967) provoqué par un court-circuit en atmosphère d'oxygène pur n'entraîne pas de révision de la conception du module lunaire. En revanche les exigences de qualité sont revues à la hausse par la NASA ce qui nécessite la modification de certains composants. Le calendrier du projet Apollo est repoussé de 19 mois ce qui permet au LEM de combler une partie de son retard[23].
Début 1968 des traces de corrosion sous contrainte sont découvertes dans la structure en alliage d'aluminium des Lem : des renforcements ponctuels et un changement d'alliage pour les Lem restant à construire sont décidés[22]. Toujours en 1968, le câblage électrique s'avère trop fragile et sujet à des ruptures[22].
La préparation au vol lunaire : les programmes Ranger, Pegasus, Lunar Orbiter, Gemini et Surveyor
Parallèlement au programme Apollo, la NASA lance plusieurs programmes qui doivent valider les choix effectués et permettre de préparer les futures missions lunaires. En 1965, 3 satellites Pegasus sont placés en orbite par une fusée Saturn I pour évaluer le danger représenté par les micrométéorites ; les résultats seront utilisés pour dimensionner la protection des vaisseaux Apollo. Les sondes Ranger (1961-1965) après une longue série d'échecs ramènent à compter de fin 1964 une série de photos de bonne qualité qui permettent de définir les zones d'atterrissage.
Le programme Lunar Orbiter, composé de 5 sondes qui sont placées en orbite autour de la Lune en 1966-1967, complète ce travail : une couverture photographique de 99 % du sol lunaire est réalisée, la fréquence des micrométéorites dans la banlieue lunaire est déterminée ainsi que l'intensité du rayonnement cosmique. Le programme permet également de valider le fonctionnement du réseau de télémétrie : les mesures effectuées permettent de déterminer que le champ de gravitation lunaire n'est pas homogène contrairement à celui de la Terre rendant dangereux les orbites avec des périgées à basse altitude. Le phénomène sous-estimé abaissera à 10 km le périgée du Lem d'Apollo 15 dont l'équipage était endormi, alors que la limite de sécurité avait été fixée à 15 km[24].
La technique du rendez-vous spatial, à la base de la création du module lunaire, est testée en vol avec succès avec un étage Agena par l'équipage de Gemini 8 le 16 mars 1966. Le 2 juin de la même année, la sonde Surveyor 1 effectue le premier atterrissage en douceur sur la Lune fournissant des informations précieuses et rassurantes sur la consistance du sol lunaire (le sol est relativement ferme).
L'entrainement des pilotes du LEM : les simulateurs de vol
Article détaillé : LLRV. Le LLRV est un simulateur volant qui reproduit le comportement du LEM en gravité lunaire
Le LLRV est un simulateur volant qui reproduit le comportement du LEM en gravité lunaireLa phase finale de l'atterrissage sur la Lune est un exercice difficile : pour des raisons de poids, la marge de carburant disponible est très faible (sur l'ensemble des missions Apollo, il restera entre 3 et 6 % de carburant dans les réservoirs du LEM à l'atterrissage soit 2 minutes de vol au maximum[25]) et il faut trouver sur un sol lunaire constellé de cratères et de blocs de pierre, un terrain suffisamment plat pour que le LEM ne bascule pas au moment de l'atterrissage et qu'il puisse par la suite redécoller (ce qui nécessite moins de 20 % de pente). Les vitesses verticale et horizontale à l'atterrissage doivent être limitées pour éviter que le train d'atterrissage ne se brise ou que le Lem bascule, ce qui aurait condamné les pilotes. On demande également au pilote d'effectuer un atterrissage précis : chaque mission a pour objectif de poser le LEM dans une zone sélectionnée à l'avance pour son intérêt géologique. Certaines des missions seront confrontées à deux autres problèmes : une luminosité gênant la reconnaissance des reliefs et, en phase finale (à compter de 30 mètres d'altitude pour Apollo 15), la poussière soulevée par le jet du moteur-fusée qui empêche de distinguer les reliefs et de connaître la vitesse horizontale résiduelle à ce moment critique. Poser un tel engin du premier coup sans faire d'erreurs et en ne l'ayant jamais réellement piloté nécessitait un entraînement intensif sur Terre.
Aussi, trois types de simulateurs de vol sont mis à la disposition des astronautes pour qu'ils puissent s'entraîner à manœuvrer le module lunaire dans des conditions s'approchant au maximum de celles rencontrées sur la Lune[26] :
- Un simulateur fixe qui permet aux astronautes de maîtriser les procédures normales et d'urgence ainsi que de s'entraîner à repérer et atterrir sur le site choisi pour la mission : à cet effet, le pilote dispose d'une vue filmée par une caméra qui survole une maquette en 3 dimensions de la région du site.
- Une maquette de module lunaire suspendue à un portique au-dessus d'un terrain configuré comme la surface de la Lune.
- Un engin volant complètement libre, le LLRV, dont le comportement reproduit celui du module lunaire, grâce à la poussée d'un réacteur monté sur cardan et piloté par un ordinateur à l'aide de commandes de vol électriques qui annule en permanence 5/6 de la gravité terrestre. Trois des cinq exemplaires du LLRV, seront détruits en vol au cours des vols de formation et de test, sans faire de victimes (Neil Armstrong échappera à la mort à une seconde près, lors d'un vol d'entrainement au cours duquel il dut s'éjecter, peu de temps avant son envol historique vers la lune).
Les caractéristiques du module lunaire
Le module lunaire comporte deux étages : un étage de descente permet d'atterrir sur la Lune. Cet étage sert de plate-forme de lancement à l'étage de remontée qui ramène les astronautes au vaisseau Apollo en orbite à la fin de leur séjour sur la Lune. La structure du module lunaire est, pour l'essentiel, réalisée avec un alliage d'aluminium choisi pour sa légèreté. Les pièces sont généralement soudées entre elles mais parfois également rivetées.
L'étage de descente
Le corps de l'étage de descente, qui pèse plus de 10 tonnes, a la forme d'une boîte octogonale d'un diamètre de 4,12 mètres et d'une hauteur de 1,65 mètres. Sa structure, constituée de deux paires de panneaux parallèles assemblés en croix, délimite cinq compartiments carrés (dont un central) et quatre compartiments triangulaires. Le corps de l'étage est enveloppé dans plusieurs pellicules de matériaux servant d'isolant thermique. Cette protection est renforcée près de la tuyère du moteur de descente.
La fonction principale de l'étage de descente est d'amener le LEM sur la Lune. À cet effet, l'étage dispose d'un moteur fusée à la fois orientable et à poussée variable. La modulation de la poussée permet d'optimiser la trajectoire de descente mais surtout de poser en douceur le LEM qui s'est fortement allégé en consommant ses ergols. Le comburant - du peroxyde d'azote (5 tonnes) - et le carburant - de l'aérozine 50 (3 tonnes) - sont stockés dans quatre réservoirs placés dans les compartiments carrés situés aux 4 coins de la structure. Le moteur se trouve dans le compartiment carré central.
Le deuxième rôle de l'étage de descente est de transporter tous les équipements et consommables qui peuvent être abandonnés sur la Lune à la fin du séjour, ce qui permet de limiter le poids de l'étage de remontée. Les 4 compartiments triangulaires délimités par la structure octogonale reçoivent :
- Les consommables utilisés durant la phase de descente et le séjour sur la Lune (oxygène, eau, batteries électriques) ;
- Les équipements scientifiques : les équipements embarqués dépendent des missions mais comprennent toujours au moins un ensemble ALSEP (Apollo Lunar Surface Experiments Package) qui regroupe des instruments qui partagent la même source d'énergie (un générateur thermoélectrique à radioisotope) et un système de télécommunications qui communique les données collectées au centre de contrôle sur Terre. Parmi les instruments on trouve sismomètre, magnétomètre, spectromètre, station météorologique, collecteurs de particules, ...
- Les outils : marteau, foreuse, ...
- Les véhicules lunaires : brouette pour Apollo 14 puis rover lunaire à partir d'Apollo 15.
Le train d'atterrissage
Pour se poser sur un sol lunaire, dont la consistance est mal connue au moment de la conception du LEM, l'étage de descente dispose d'un train d'atterrissage[N 10] comportant 4 jambes largement écartées pour procurer la meilleure stabilité à l'atterrissage. Chaque jambe se termine par une semelle d'un diamètre de 94 cm qui doit limiter l'enfoncement du LEM même dans un sol très meuble. Des structures en nid d'abeille, situées au niveau des jambes et des semelles, s'écrasent au moment de la prise de contact avec le sol et jouent ainsi le rôle d'amortisseur : le train d'atterrissage est conçu pour supporter une vitesse horizontale de 1,22 m/s et une vitesse verticale de 2,43 m/s (3 m/s si la vitesse horizontale est nulle). La semelle de chaque pied est prolongée vers le bas par une tige longue de 1,50 mètre qui, au moment du contact avec le sol, allume un voyant sur le tableau de bord ce qui doit donner le temps au pilote d'éteindre le moteur avant le contact avec le sol. Le train d'atterrissage, stocké en position repliée au départ, est déployé lorsque le LEM est mis en orbite autour de la Lune[27].
L'étage de remontée
 L'étage de remontée du LEM d'Apollo 17 peu avant l'accostage avec le module de commande
L'étage de remontée du LEM d'Apollo 17 peu avant l'accostage avec le module de commande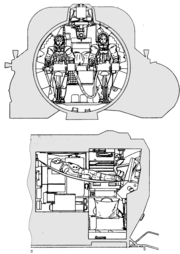 Cabine pressurisée : les astronautes en position de vol et au repos
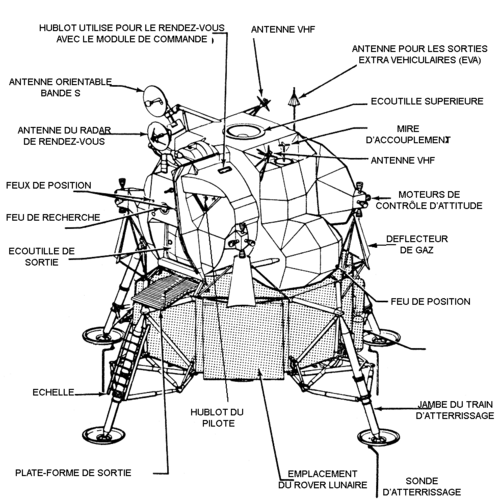
Cabine pressurisée : les astronautes en position de vol et au repos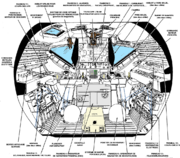 Schéma de la partie avant de la cabine
Schéma de la partie avant de la cabine Cabine : vue vers l'avant
Cabine : vue vers l'avant Schéma de la console de l'ordinateur principal de navigation (LGC)
Schéma de la console de l'ordinateur principal de navigation (LGC) Sur ce LEM (Apollo 11) on distingue bien l'électronique installée dans le compartiment arrière.
Sur ce LEM (Apollo 11) on distingue bien l'électronique installée dans le compartiment arrière.L'étage de remontée pèse environ 4,5 tonnes. Sa forme complexe, qui résulte d'une optimisation de l'espace occupé, lui donne l'allure d'une tête d'insecte. Il est essentiellement composé de la cabine pressurisée qui héberge deux astronautes dans un volume de 4,5 m3 et du moteur de remontée avec ses réservoirs d'ergols.
Les moteurs
La trajectoire de retour vers le module de commande étant beaucoup plus simple, la poussée du moteur est constante. Les ergols (910 kg de peroxyde d'azote et 1,4 tonnes d'aérozine 50) sont stockés chacun dans un unique réservoir mis sous pression par de l'hélium. L'architecture générale de l'étage est conçue de manière à ce que le centre de masse et le centre de poussée du moteur soient très proches (moins d'un mètre) : le moteur est placé très haut (le sommet dépasse dans la cabine) et les réservoirs sont placés de part et d'autre de la cabine. Cette disposition limite le couple à exercer pour maintenir l'étage dans la direction voulue durant la phase propulsée. Le moteur n'est pas orientable et les corrections sont réalisées par des moteurs d'attitude (RCS Reaction Control System) de 45 kg de poussée regroupés en quatre grappes de quatre moteurs, situées à chaque angle de l'étage, et dont les actions combinées permettent d'agir selon les trois axes de lacet, de tangage et de roulis. Pour maximiser leur efficacité, ils sont écartés au maximum de l'axe de la poussée du moteur principal[28].
La cabine pressurisée
La partie avant de la cabine pressurisée occupe la plus grande partie d'un cylindre de 2,34 mètres de diamètre et de 1,07 mètres de profondeur. C'est là que se tient l'équipage lorsqu'il n'est pas en excursion sur la Lune. Le pilote (à gauche face à l'avant) et le commandant de bord sont debout, tenus par des harnais qui les maintiennent en place en impesanteur et durant les phases d'accélération. Sur la cloison avant, chaque astronaute a devant lui un petit hublot triangulaire (0,18 m2)[N 11] incliné vers le bas, qui lui permet d'observer le sol lunaire avec un bon angle de vision, ainsi que les principales commandes de vol et cadrans de contrôle regroupés par panneaux généralement dédiés à un sous-système. Les commandes et contrôles communs sont placés entre les deux astronautes (par exemple la console d'accès à l'ordinateur de navigation), certaines commandes sont doublées (commandes pilotant l'orientation et la poussée des moteurs), les autres commandes sont réparties en fonction des tâches assignées à chaque astronaute. Les panneaux de commandes et coupe-circuits se prolongent sur les parois latérales situées de part et d'autre des astronautes. Le pilote a au-dessus de sa tête un petit hublot (0,07 m2) qui lui permet de contrôler la manœuvre de rendez-vous avec le module de commande. En haut du panneau central situé face aux astronautes se trouve le télescope utilisé pour faire le point avec les astres, et au ras du plancher, l'écoutille de forme carrée (96 x 96 cm) qui est utilisée pour descendre sur le sol lunaire[29].
L'arrière de la cabine pressurisée est beaucoup plus exigu (1,37 x 1,42 m pour 1,52 m de haut) : son plancher est plus haut de 48 cm et, de plus, encombré par un capot recouvrant le sommet du moteur de remontée. Les parois latérales sont occupées par les rangements et à gauche par une partie du système de contrôle environnemental. Dans cette niche les astronautes rangent le deuxième système de survie portable (le premier se trouve couché sur le plancher de la cabine avant entre les 2 astronautes), la nourriture, les scaphandres de sortie avec les bottes et les casques, les sacs de déchets corporels, ... Derrière la cloison arrière se situe un compartiment non pressurisé dans lequel est logée une grande partie des composants électriques et électroniques. Au plafond, se trouve l'écoutille utilisée pour passer dans le Module de Commande : derrière cette porte, on trouve un tunnel court (80 cm de diamètre pour 46 cm de long) comportant un système de verrouillage utilisé pour solidariser les deux vaisseaux. Les forces en jeu au moment de l'accostage qui pourraient déformer le tunnel sont amorties par des poutres qui les répercutent sur toute la structure[29].
Les panneaux de commande comportent environ 170 interrupteurs, en majorité à deux ou trois positions, répartis entre plusieurs panneaux de contrôle et plus de 80 afficheurs dont plus de vingt fournissant des informations quantifiées (quatre afficheurs numériques, dix-huit indicateurs à aiguille, ...)[30]. L'électroluminescence, une technologie alors balbutiante[N 12], est utilisée pour éclairer les tableaux de commande et de contrôle : les voyants sont plus lisibles et la consommation électrique est diminuée[9].
Le LEM ne dispose pas de sas, qui aurait ajouté trop de poids. Pour descendre sur le sol lunaire, les astronautes font le vide dans la cabine et, à leur retour, ils pressurisent la cabine avec les réserves d'oxygène. Pour descendre, ils se glissent dans l'écoutille : celle-ci donne sur une petite plate-forme horizontale qui débouche sur l'échelle dont les barreaux sont situés de part et d'autre d'une des jambes de l'étage de descente.
Article détaillé : Apollo Guidance Computer.Le Module Lunaire embarque deux systèmes qui réalisent la navigation (le calcul de la position et la définition de la trajectoire) et le pilotage (la gestion des commandes de vol conformément à la trajectoire retenue) du module lunaire. Chacun de ces systèmes repose sur un ordinateur : ce sont le Lem Guidance Computer (LGC) et l'Abort Guidance System (AGS). Ce dernier est mis en œuvre en cas de défaillance du LGC.
Le LGC est un ordinateur effectuant des traitements en temps réel. Il est multitâche (jusqu'à 8 tâches exécutées en parallèle). La mémoire utilise des mots de 16 bits : elle est composée de 64 ko (32 000 mots) de mémoire morte contenant l'ensemble des programmes et de 4 ko (2 000 mots) de mémoire vive (effaçable) utilisée par les traitements. Les deux types de mémoire sont constitués de tores magnétiques : les programmes sont implantés dans l'ordinateur à la fabrication. Le processeur, est constitué d'environ 5 000 portes NOR réalisées à l'aide de circuits intégrés. Il pèse environ 35 kg[31].
Le LGC reçoit ses principales informations du système inertiel (IMU) ainsi que des deux radars lorsque ceux-ci sont activés. Utilisant des programmes de navigation dédiés à chaque phase de la mission, il est capable de piloter en direction et en poussée les deux moteurs principaux ainsi que les 16 moteurs d'orientation pour que LEM suive la trajectoire qui a été calculée. Les astronautes utilisent une console (DSKY) pour entrer des instructions : lancement de programme de navigation, demande d'information, réinitialisation de la position, saisie des paramètres de vol à exécuter, etc.
Le système inertiel doit être régulièrement recalé en effectuant un relevé de la position du LEM dans l'espace. À cet effet les astronautes disposent du télescope optique d'alignement (Alignment Optical Telescop AOT). Cet instrument permet relever la position des étoiles et est interfacé avec l'ordinateur embarqué. Deux méthodes peuvent être utilisées. Lorsque le LEM navigue seul, l'astronaute entre une référence d'étoile dans l'ordinateur : celui-ci fait alors pivoter avec ses moteurs d'orientation le vaisseau de manière à ce que l'étoile passe devant l'optique du télescope[N 13]). L'étoile va successivement couper l'abscisse et l'ordonnée d'un réticule qui s'affiche dans l'optique. L'astronaute signale à l'ordinateur au moyen de deux boutons situés sur la monture du télescope le moment ou les deux lignes sont successivement coupées. En relevant la position de deux étoiles, l'ordinateur peut recalculer la position du LEM et si besoin recaler la centrale inertielle. Lorsque le LEM ne peut pas pivoter librement — lorsqu'il est posé sur la Lune ou lorsqu'il est accouplé au module de commande —, l'astronaute fait pivoter le réticule de manière à recouper les deux lignes d'un réticule dédié. Il relève à chaque fois l'angle que fait le réticule puis saisit les informations dans l'ordinateur[32],[33].
Le module lunaire dispose par ailleurs de deux radars :
- Le radar de rendez-vous (Rendezvous Radar) est utilisé pour la manœuvre de rendez-vous avec le Module de Commande après sa remontée depuis la Lune et sa mise en orbite basse. Un transpondeur radar embarqué à bord du module de commande envoie un signal en réponse à l'émission du radar qui est analysé et fournit la distance, la vitesse et l'angle que forme le vaisseau cible avec l'axe du LEM. Le radar a une portée nominale de 75 km. L'antenne du radar peut être pointée manuellement vers la cible par un astronaute. Elle peut être également maintenue pointée vers la cible par un système automatique dédié autonome (qui comprend un gyroscope) ou par l'ordinateur de bord. À partir du moment où le radar a accroché le transpondeur, la distance, la vitesse relative et le gisement (angle en abscisse et ordonnée) du module de commande sont affichés sur le tableau de bord[34].
- Le radar d'atterrissage (Lunar Radar) détermine l'altitude au-dessus du sol lunaire et la vitesse de défilement du LEM par rapport au sol. Il est installé sur l'étage de descente. Le radar est activé lorsque le vaisseau est descendu à moins de 15 km d'altitude mais ses données ne sont utilisées par l'ordinateur de navigation qu'à partir de l'altitude de 12 km. L'antenne du radar a deux positions pour pouvoir fonctionner lorsque le LEM est en phase de freinage (l'axe vertical du LEM est alors parallèle au sol lunaire) et en phase d'approche finale (axe vertical du LEM plus ou moins perpendiculaire au sol lunaire). À l'atterrissage, lorsque le sol est à moins de 15 mètres, en l'absence de vitesse horizontale, il ne peut plus fournir d'information valable : l'ordinateur utilise alors les données fournies par le gyroscope. Les données du radar sont affichées sur le tableau de bord[35].
Au cours des deux manœuvres de rendez-vous, au moment de l'approche finale, le pilote doit aligner exactement le module lunaire selon les trois axes avec le module de Commande. À cet effet il dispose d'un système de visée optique (le COAS Crewman Optical Alignment Sight). Cet instrument est monté sur le hublot supérieur destiné à la manœuvre. Il projette un réticule que le pilote doit superposer avec la cible située sur le Module de Commande[36].
Pour se signaler durant les manœuvres de rendez-vous avec le module de Commande, le LEM a des feux de position visibles à plus de 300 mètres : les conventions terrestres sont reprises : un feu rouge signale le coté bâbord et un vert le tribord et un feu blanc l'arrière ; par ailleurs 2 feux, l'un blanc l'autre jaune matérialise sur la face avant l'axe horizontal[37]. Pour faciliter le repérage à grande distance par le module de commande, un feu scintillant (50 éclats par seconde) émet une lumière visible à près de 700 km (400 nautiques)[38].
L'AGS (Abort Guidance System) est un système de navigation et de pilotage destiné à remplacer le système principal (LGC) en cas de défaillance de celui-ci durant les phases de descente sur la Lune ou de remontée. L'activation de l'AGS entraîne l'interruption de la mission et le largage de l'étage de descente si le LEM est en cours d'atterrissage. L'AGS est conçu par une société différente TRW[N 14]. Il est composé de :
- un ordinateur (AEA pour Abort Electronics Assembly) doté d'une mémoire vive de 4 ko et d'une mémoire morte de 4 ko dédiée aux programmes (mot de 18 bits). La mémoire utilise la même technologie que l'AGS.
- un système inertiel(ASA pour Abort Sensor Assembly) très compact (4 kg) composé de trois accéléromètres.
- d'une console d'affichage et de saisie (DSE pour Data Sensor Assembly) : plus rudimentaire que celle de l'LGC, permet d'afficher et de saisir des données dans le LGC.
L'ensemble pèse 28 kg et consomme une centaine de watts quand il est utilisé. Pour son fonctionnement le LGC exploite les données des radars et de son système inertiel. Plus simple que le système principal il dispose des fonctions suivantes : ramener le vaisseau en orbite basse, effectuer les manœuvres pour placer le LEM en orbite de transfert, corriger l'orbite, effectuer la manœuvre de rendez-vous avec le module de Commande. Les programmes sont différents de ceux de le LGC pour éviter qu'une même faille de programmation se retrouve dans les deux systèmes.
Au démarrage l'initialisation des caractéristiques de la position et de la trajectoire sont réalisées soit par transfert depuis l'ordinateur de navigation principal soit par saisie à l'aide de la console dédiée. Il agit sur la poussée du moteur principal et les moteurs d'attitude conformément au programme sélectionné et restitue au pilote certaines informations (altitude, vitesse) sur le tableau de bord. L'AGS est également utilisé pour vérifier les calculs de l'ordinateur de navigation principal, lorsque celui-ci fonctionne. Il fournit des informations télémétriques périodiques au Contrôle au sol[39].
Le système de contrôle environnemental
 Une partie du système de contrôle environnemental est dans la cabine (Apollo 13 avec le filtre CO² « bricolé »)
Une partie du système de contrôle environnemental est dans la cabine (Apollo 13 avec le filtre CO² « bricolé ») Vue arrière du LEM d'Apollo 11 : Neil Armstrong est en train de sortir un sismomètre de l'une des baies de l'étage de descente
Vue arrière du LEM d'Apollo 11 : Neil Armstrong est en train de sortir un sismomètre de l'une des baies de l'étage de descenteLe système de contrôle environnemental a en charge de fournir des conditions vivables pour les deux astronautes (oxygène, température), de maintenir l'électronique dans une fourchette de températures acceptable, de dépressuriser et pressuriser la cabine, de fournir l'eau pour l'alimentation (hydratation des aliments solides et boisson), l'extinction d'un éventuel incendie, le système de contrôle thermique et enfin d'alimenter en eau et oxygène le Système de Survie Portable (PLSS) utilisé par les astronautes durant les sorties extravéhiculaires (EVA)[40].
Les réserves d'eau et d'oxygène sont, pour l'essentiel, situées dans l'étage de descente pour ne pas alourdir l'étage de remontée. (186 litres d'eau sur 225). Le module lunaire dispose d'un système d'alimentation en oxygène en circuit fermé comportant des filtres pour absorber le dioxyde de carbone.
Le contrôle thermique est à la fois passif et actif :
- Pour assurer un contrôle thermique passif, l'ensemble de l'étage est recouvert de plusieurs pellicules de matériau réverbérant la chaleur qui fait également office de bouclier contre les micrométéorites. La protection principale est constituée de 25 couches de mylar sur un support d'aluminium qui est maintenue écartée de 4 cm de la structure par des petits plots en nylon[N 15]. Dans les endroits exposés aux flammes des moteurs, un « film-H », matériau offrant plus de résistance à la chaleur, est appliqué.
- Le contrôle thermique actif repose sur un circuit de refroidissement dans lequel circule un mélange eau-glycol qui traverse les équipements générateurs de chaleur situés à l'intérieur et à l'extérieur de la cabine pressurisée pour maintenir la température dans une fourchette permettant leur fonctionnement. La chaleur est dispersée en premier lieu grâce à des radiateurs ; la chaleur qui subsiste est évacuée par sublimation d'eau en gaz. Un circuit de refroidissement de secours permet de pallier une panne du circuit principal[41].
L'énergie électrique à bord
Grumman après avoir dans un premier temps étudié l'utilisation de piles à combustible pour fournir l'électricité opte pour des batteries classiques, plus simples à mettre œuvre, afin de tenir l'échéance[42]
L'énergie électrique est fournie par quatre batteries (cinq à partir d'Apollo 15) situées dans l'étage de descente et deux batteries situées dans l'étage de remontée. Ces batteries non rechargeables fournissent en tout 2280 A-h (2667 A-h à partir de Apollo 15) sous 28 volts par le biais de deux circuits indépendants redondants. Les anodes en zinc et argent sont plongées dans un électrolyte d'hydroxyde de potassium. Le poids total des batteries est de 358 kg (420 kg à partir d'Apollo 15. Le courant est transformé en 110 V 400 Hz pour alimenter les différents sous-systèmes. Des batteries indépendantes déclenchent les systèmes pyrotechniques (séparation d'étage, déploiement du train d'atterrissage, percussion des réservoirs, ...) et sont présentes dans les systèmes de survie portables (PLSS)[43].
Télécommunications
Le LEM dispose de deux systèmes de télécommunications :
- Un émetteur-récepteur qui fonctionne en bande S sur la fréquence de 2,2 GHz pour les communications longue distance avec la Terre (cette bande est utilisée parce qu'elle n'est que faiblement affectée par l'atmosphère terrestre). La Nasa a développé des appareils (Unified S-band System USB) qui permettent de transmettre à l'aide d'une même antenne des paquets de données, émissions télévisuelles ou vocales ainsi que de localiser l'émetteur. Le débit dépend de la nature des données transmises ;
- Un émetteur-récepteur VHF avec deux canaux utilisé pour les communications locales entre les deux vaisseaux et entre les astronautes durant les sorties extra-véhiculaires. Le système VHF a une portée de 1 400 km.
Ces systèmes de communication permettent également au Centre de Contrôle sur Terre de récupérer des données télémétriques qui permettent de connaître la position et de la trajectoire du LEM par trigonométrie en utilisant plusieurs stations de réception sur Terre. Des télémesures de l'état des différents sous-systèmes du vaisseau et les données biométriques des astronautes sont également récupérées en permanence par le Centre de Contrôle ; ces liaisons permettent aussi de télécharger des données dans l'ordinateur de navigation du LEM et de contrôler les données qui y son stockées. L'équipage du LEM utilise ces canaux pour transmettre des images vidéo (télévision).
Le LEM dispose de plusieurs antennes :
- Une antenne parabolique orientable de 66 cm de diamètre en bande S. Le maintien de l'orientation de l'antenne parabolique est réalisée automatiquement dès que l'émetteur terrestre a été accroché. Deux petites antennes coniques fixes omnidirectionnelles couvrant chacune 180° en bande S servent de systèmes secours ;
- Deux antennes VHF couvrant chacune 180° utilisées en vol ;
- Une antenne omnidirectionnelle VHF utilisée sur le sol lunaire pour les sorties extravéhiculaires ;
- Une deuxième antenne parabolique de 61 cm de diamètre en bande-S est déployée sur le sol lunaire (elle est montée sur le rover lunaire à partir de la mission Apollo 15) ;
Pour recevoir et émettre, les astronautes disposent d'un casque audio qu'ils peuvent porter sous leur tenue de sortie extravéhiculaire[44].
La version améliorée du LEM des missions J
 Le LEM des missions J permit d'embarquer le rover lunaire (Apollo 15)
Le LEM des missions J permit d'embarquer le rover lunaire (Apollo 15)Début 1969 la NASA lance des études pour s'assurer que la fusée Saturne 5 peut placer en orbite une charge plus lourde et que le module lunaire peut effectuer des missions plus longues sur la Lune (missions dites J). Les conclusions positives (Saturn 5 après évolution peut satelliser 2 tonnes supplémentaires) donnent le coup d'envoi au développement d'une version un peu plus lourde de l'étage de remontée du LEM[45].
Utilisée à compter de la mission Apollo 15 (première mission dite J), cette version du LEM est équipée de manière à pouvoir séjourner 67 heures sur la Lune (au lieu de 35 heures) et transporter plus d'équipements scientifiques ainsi que le rover lunaire. Les principales modifications sont :
- Une cinquième batterie dans l'étage de descente et un accroissement de la capacité par batterie de 400 à 425 A-h ;
- 500 kg de propergols supplémentaires dans l'étage de descente pour prendre en compte de l'alourdissement du LEM et donner plus de marge au pilote pour se poser. Les réservoirs sont allongés vers le bas de 10 cm ;
- Les réserves d'oxygène et d'eau sont accrues pour faire face à la consommation supplémentaire des astronautes ;
- La protection thermique est améliorée pour prendre en compte une durée d'exposition plus longue ;
- Le poids du matériel scientifique et d'exploration qui peut être logé dans les baies de l'étage de descente augmente de 180 kg, ce qui permet d'emporter le rover lunaire ;
- La tuyère du moteur de l'étage de descente est allongée de 25 cm pour fournir une poussée plus importante ;
- Le revêtement de la chambre de combustion du moteur de descente est modifié pour réduire le phénomène d'ablation[46].
Le rôle du module lunaire
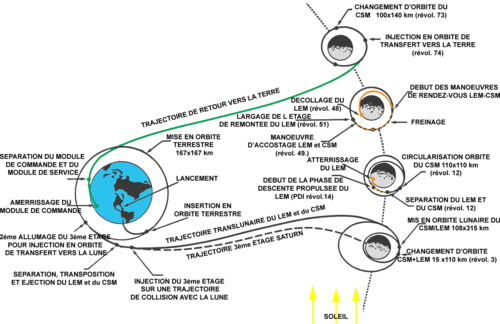 Trajectoire de la mission Apollo 15
Trajectoire de la mission Apollo 15 Le LEM dans son carénage : il en sera expulsé une fois effectuée la manœuvre d'accouplement avec le Module de Commande
Le LEM dans son carénage : il en sera expulsé une fois effectuée la manœuvre d'accouplement avec le Module de Commande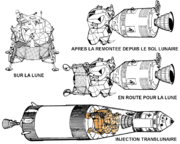 Les différentes configurations du module lunaire durant une mission Apollo
Les différentes configurations du module lunaire durant une mission ApolloLes missions Apollo sont programmées pour que le module lunaire atterrisse au tout début du jour lunaire : les astronautes bénéficient ainsi d'une lumière rasante pour le repérage du terrain (entre 10 et 15° d'élévation au-dessus de l'horizon selon les missions) et de températures relativement modérées[N 16] durant le séjour sur la Lune (rappel : le jour lunaire dure environ 28 jours terrestres). En conséquence, pour chaque lieu d'atterrissage choisi, la fenêtre de tir de la fusée Saturn est réduite à 3 jours par mois. Le site retenu est toujours situé sur la face visible de la Terre pour que les communications entre le vaisseau et la Terre ne soient pas interrompues ; il n'est pas trop éloigné de la bande équatoriale de la Lune pour limiter la consommation de carburant.
Le déroulement d'une mission comporte les phases suivantes :
- La mise en orbite basse ;
- L'injection en orbite de transfert vers la Lune ;
- La mise en orbite autour de la Lune ;
- La descente du module lunaire sur la Lune ;
- Le séjour sur la Lune ;
- La remontée du module lunaire ;
- L'injection en orbite de transfert vers la terre ;
- La rentrée dans l'atmosphère terrestre.
De l’orbite terrestre à l’orbite lunaire
Une fois placé en orbite basse, les vaisseaux Apollo (LEM et modules de Commande et de Service) ainsi que le troisième étage de la fusée effectuent un tour et demi autour de la Terre puis le moteur du troisième étage est rallumé pour injecter l'ensemble sur une orbite de transfert vers la Lune (Translunar Injection - TLI). L'injection se traduit par une augmentation de la vitesse de 3 040 m/s 10 000 km/h).
Le module lunaire est, depuis l’envol de la fusée Saturn, stocké en position repliée dans un carénage - le SLA (Spacecraft Lunar Module Adapter) - situé entre le 3e étage de la fusée Saturn et les modules de Commande et de Service.
Peu après la fin de la poussée, le Module de Commande et de Service (CSM) se détache du reste du train spatial puis pivote de 180° pour venir repêcher le LEM dans son carénage. Après avoir vérifié l'arrimage des deux vaisseaux et pressurisé le LEM, les astronautes déclenchent par pyrotechnie la détente de ressorts situés dans le carénage du LEM : ceux-ci écartent le LEM et le CSM du troisième étage de la fusée Saturn à une vitesse d'environ 30 cm/seconde. Le troisième étage va alors entamer une trajectoire divergente[N 17] qui, selon les missions le place en orbite autour du Soleil ou l'envoie s'écraser sur la Lune.
Durant le trajet de 70 heures vers la Lune, des corrections peuvent être apportées à la trajectoire du CSM et du LEM pour optimiser la consommation finale de propergols. Initialement, le déroulement d’une missions Apollo prévoyait une quantité relativement importante de carburant pour ces manœuvres[N 18]. À l'usage, à peine 5 % de cette quantité sera consommée grâce à la précision de la navigation. Le train spatial est mis en rotation lente pour limiter l'échauffement des vaisseaux en réduisant la durée de l'exposition continue au Soleil.
Une fois arrivé à proximité de la Lune, le moteur du module de commande est allumé pour placer les vaisseaux en orbite en les freinant[N 19]. Si ce freinage n'est pas réalisé, la trajectoire permet aux vaisseaux de revenir se placer en orbite terrestre après avoir fait le tour de la Lune sans utiliser leurs moteurs (Cette disposition sauvera la mission Apollo 13). Un peu plus tard, le moteur du CMS est utilisé une deuxième fois pour placer les deux vaisseaux sur une orbite circulaire de 110 km de rayon[47].
Descente et atterrissage sur la Lune
Pour économiser les propergols de l’étage de descente du LEM, la trajectoire de la descente est découpée en plusieurs phases : la première phase est l'abaissement de l'orbite qui est suivi de la descente propulsée (Powered Descent) qui elle-même se décompose en une phase de freinage, une phase de repérage et une phase d’atterrissage.
La descente sur la Lune repose en grande partie sur le système de guidage, navigation et contrôle (PGNCS Primary Guidance, and Control System) piloté par l'ordinateur embarqué (LGC). Celui-ci, d’une part va déterminer périodiquement la position et la trajectoire réelle du vaisseau en utilisant d'abord la centrale inertielle puis le radar d'atterrissage (fonction de navigation), d’autre part il va calculer la trajectoire à suivre en utilisant ses programmes, et piloter en fonction de tous ces éléments la poussée et l’orientation des moteurs (fonction de guidage). Le pilote du LEM peut certes corriger l’altitude en cours à tout moment et dans la dernière phase reprendre complètement la main sur les commandes des moteurs. Mais seul le système de navigation et de pilotage permet, en optimisant trajectoire et consommation des ressources, de poser le LEM avant d'avoir épuisé auparavant tout le carburant[48].
Le centre de contrôle au sol situé à Houston prend en charge l’initialisation du système de navigation : grâce aux données télémétriques fournies par ses échanges avec le vaisseau en bande S et ses programmes de simulation s’appuyant sur un modélisation détaillée de la surface et de la gravité lunaire, il peut calculer avec plus de précision que l’ordinateur du LEM les paramètres initiaux : la position et le vecteur vitesse du vaisseau spatial à l’allumage des moteurs ainsi que le vecteur de la poussée à appliquer pour la première phase de la descente.
Les données calculées par le centre de contrôle sont introduites par les astronautes dans l’ordinateur de bord. Celui-ci va, au cours de la descente, exécuter successivement plusieurs programmes de guidage (un pour chaque segment de la trajectoire : abaissement d’orbite, freinage, etc.) qui vont moduler la poussée et la direction du moteur de descente ainsi que les moteurs d’attitude[N 20]. L’ordinateur de bord actualise toutes les 2 secondes sa position grâce aux mesures d’accélération de sa centrale inertielle (gyroscope) et aux mesures de vitesse de défilement du sol et d’altitude fournies par le radar dans les phases finales lorsque le LEM est suffisamment proche du sol. À la demande des astronautes, l’ordinateur peut restituer les informations de navigation[49].
L'abaissement de l'orbite
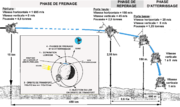 Déroulement de l'atterrissage sur la Lune
Déroulement de l'atterrissage sur la LuneL'objectif de cette phase est d'abaisser l'altitude du LEM de 110 km à 15 km au-dessus du sol lunaire. À cet effet, son orbite circulaire est transformée en une orbite elliptique de 15 km sur 110 km. Cette phase, permet de réduire la distance à parcourir jusqu’au sol lunaire à un faible coût en propergols (elle ne nécessite qu'une brève impulsion du moteur). La limite des 15 km a été retenue pour éviter que la trajectoire finale ne s'approche trop du relief.
Deux des trois astronautes de l'équipage prennent place dans le Module Lunaire pour descendre sur la Lune. Ils initialisent le système de navigation avant d’entamer la descente vers la Lune. Le LEM et le CSM se séparent avant que le moteur ne soit mis en marche (jusqu’à Apollo 12).
Le changement d’orbite est initié lorsque le vaisseau spatial se situe aux antipodes (à une demi-orbite) du point où démarrera la phase suivante. Une fois que la distance entre le LEM et le module de commande est suffisante (une centaine de mètres), une petite accélération est d’abord imprimée par les moteurs contrôlant l'attitude pour plaquer le carburant du moteur de descente contre les vannes de distribution puis le moteur de descente est allumé brièvement pour freiner le LEM d'environ 25 mètres/seconde (90 km/h) le LEM[50].
À partir d’Apollo 14, pour économiser les propergols de l’étage de descente, c’est le moteur du Module de Commande et de Service qui est sollicité pour abaisser l’orbite. Le CSM accompagne donc le LEM dans son orbite elliptique et s’en sépare avant que la descente propulsée ne démarre.
La descente propulsée
Cette phase est caractérisée par une action continue du moteur de descente. Elle démarre lorsque le LEM a atteint le point le plus bas de son orbite elliptique. Elle se décompose elle-même en trois phases : la phase de freinage, la phase d'approche et la phase d'atterrissage.
La phase de freinage
La phase de freinage vise à réduire la vitesse du vaisseau de la manière la plus efficace possible : celle-ci va passer de 1 695 m/s (6 000 km/h) à 150 m/s (550 km/h). Le moteur est allumé à 10 % de sa puissance durant 26 secondes, le temps que le moteur s'aligne grâce à son cardan sur le centre de gravité du vaisseau, puis il est poussé au maximum de sa puissance. Le module lunaire qui au début de la trajectoire est pratiquement parallèle au sol va progressivement s’incliner tandis que sa vitesse de descente nulle au départ augmente jusqu’à 45 m/s en fin de phase[51]. Lorsque le LEM se trouve à une altitude inférieure à 12-13 km, le radar d'atterrissage accroche le sol et se met à fournir des informations (altitude, vitesse de déplacement) qui vont permettre de vérifier que la trajectoire est correcte : jusqu'alors celle-ci était extrapolée uniquement à partir de l'accélération mesurée par la centrale à inertie. Une différence trop importante entre les données fournies par le radar et la trajectoire visée ou le non fonctionnement du radar sont des motifs d'interruption de la mission [52].
La phase d'approche
 Répétition de la manœuvre de rendez-vous au-dessus de la Lune : le LEM « Snoopy » photographié par le pilote du CM (Apollo 10)
Répétition de la manœuvre de rendez-vous au-dessus de la Lune : le LEM « Snoopy » photographié par le pilote du CM (Apollo 10)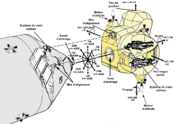 Schéma de la manœuvre de rendez-vous après le séjour sur la Lune
Schéma de la manœuvre de rendez-vous après le séjour sur la LuneLa phase d'approche démarre à 7 km du site visé alors que LEM est à une altitude de 700 mètres. Elle doit permettre au pilote de repérer la zone d'atterrissage et de choisir le lieu précis (dégagé) où il souhaite atterrir. Son point de départ est désigné sous le terme de « porte haute » (high gate) expression empruntée à l'aéronautique.
Le module lunaire est progressivement redressé en position verticale fournissant au pilote une meilleure vision du terrain. Celui-ci peut ainsi localiser le point d'atterrissage auquel conduit la trajectoire grâce à une échelle gravée sur son hublot graduée en degrés (Landing Point Designator LPD)[N 21] : l'ordinateur fournit à la demande l'angle sous lequel l'astronaute peut voir le lieu d'atterrissage sur cette échelle. Si celui-ci juge que le terrain n'est pas propice à un atterrissage ou qu’il ne correspond pas au lieu prévu, il peut alors corriger l'angle d'approche en agissant sur les commandes de vol par incrément de 0,5° dans le sens vertical ou 2° en latéral[53].
La phase d'atterrissage
Lorsque le module lunaire est descendu à une altitude de 150 mètres ce qui le place théoriquement à une distance de 700 mètres du lieu visé (point désigné sous le terme de low gate), démarre la phase d'atterrissage. Si la trajectoire a été convenablement suivie, les vitesses horizontale et verticale sont respectivement alors de 66 km/h et 18 km/h. La procédure prévoit que le pilote prenne la main pour amener le module lunaire au sol mais il peut, s'il le souhaite, laisser faire l'ordinateur de bord qui dispose d'un programme de pilotage pour cette dernière partie du vol[N 22]. En prenant en compte les différents aléas (phase de repérage allongée de 2 minutes, modification de la cible de dernière minute de 500 mètres pour éviter un relief, mauvaise combustion finale, jauge de propergol pessimiste), le pilote dispose d'une marge de 32 secondes pour poser le LEM avant l'épuisement des ergols. La dernière partie de la phase est un vol plané à la manière d’un hélicoptère qui permet à la fois d’annuler toutes les composantes de vitesse mais également de mieux repérer les lieux. Des sondes situées sous les semelles du train d’atterrissage prennent contact avec le sol lunaire lorsque l'altitude est inférieure à 1,3 mètre et transmettent l’information au pilote. Celui-ci doit alors couper le moteur de descente pour éviter que le LEM ne rebondisse ou ne se renverse (la tuyère touche presque le sol)[54].
Le séjour sur la Lune
Le séjour sur la Lune est rythmé par les sorties extra-véhiculaires (une sortie pour Apollo 11 mais jusqu’à quatre sorties pour les dernières missions). Avant chaque sortie, les astronautes doivent faire le plein en eau et oxygène de leur système de survie portable puis enfiler leur tenue. Ils font ensuite le vide avant d’ouvrir l’écoutille qui donne accès à l’échelle.
Les outils et les instruments scientifiques sont sortis des baies de stockage de l’étage de descente puis sont déployés non loin du LEM ou à plus grande distance. À partir d’Apollo 14, les astronautes disposent d’une brouette puis dans le cadre des vols suivants du rover lunaire qui leur permet de s’éloigner d’une dizaine de km du LEM en transportant de lourdes charges. Le Rover occupe une baie entière du module lunaire : il est stocké en position repliée sur une palette que les astronautes abaissent pour libérer le véhicule. Le rover est déployé par un système de ressorts et de cordes agissant via des poulies et actionnés par les astronautes.
Avant de quitter la Lune, les échantillons géologiques placés dans des conteneurs sont hissés jusqu’à l’étage de remontée grâce à un palan. Le matériel qui n’est plus nécessaire (survie portable, appareils photos, …) est abandonné pour alléger au maximum l’étage de remontée[N 23].
La remontée et le rendez-vous avec le module de commande
La phase de remontée doit permettre au LEM de rejoindre le module de commande resté en orbite. Cet objectif est atteint en 2 temps : l’étage du LEM décolle du sol lunaire pour se mettre en orbite basse puis ensuite à l'aide de poussées ponctuelles du moteur-fusée il rejoint le module de commande.
Avant le décollage la position précise du LEM au sol est entrée dans l'ordinateur afin de déterminer la meilleure trajectoire. L'instant du départ est calculé de manière à optimiser la trajectoire de rendez vous avec le module de Commande. L'étage de descente reste au sol et sert de plate-forme de lancement. La séparation des deux étages est déclenchée avant le décollage par de petites charges pyrotechniques qui sectionnent les quatre points solidarisant les deux étages ainsi que les câbles et tuyauteries.
Le Module Lunaire suit d'abord une trajectoire verticale jusqu'à une altitude d'environ 75 mètres pour se dégager du relief lunaire puis s'incline progressivement pour rejoindre finalement à l'horizontale le périlune (point bas) d'une orbite elliptique de 15 km sur 67 km.
Un rendez-vous est alors effectué entre le CSM (piloté par le troisième membre d'équipage, le seul de la mission à ne pas aller sur la Lune) et le LEM en orbite lunaire. Une fois les pierres lunaires transférées, le LEM est libéré et lancé sur une trajectoire qui l’amènera à s’écraser sur la Lune. Le module de commande et le module de service peuvent entamer leur retour vers la Terre.
La qualification en vol du module lunaire (1968-1969)
 Le Lem-1 est installé dans l'adaptateur pour la mission Apollo-5
Le Lem-1 est installé dans l'adaptateur pour la mission Apollo-5Pour tester le fonctionnement en vol du module lunaire, la NASA prévoyait initialement 5 vols utilisant la fusée Saturn IB consacrés à la mise au point des moteurs de descente et de remontée (mission de type B) puis, en fonction des résultats, un nombre variable de vols pour tester successivement le fonctionnement conjoint du CSM et du LEM en orbite basse (mission de type D), en orbite haute (mission de type E) et autour de la Lune (mission de type F). Les bons résultats obtenus dès le premier test permirent de réduire le nombre de vols à une mission de chaque type[55].
Apollo 5
Le 22 janvier 1968, avec 9 mois de retard sur le planning prévu, le LEM est testé pour la première fois en en vol au cours de la mission Apollo 5. Pour réduire les coûts, le module lunaire (Lem-1) est dépourvu de train d'atterrissage (il n'est pas prévu de le tester). Les hublots sont obturés par des panneaux en aluminium car au cours de tests de pression réalisés un mois auparavant un hublot s'était brisé. Une fois le LEM placé en orbite, le moteur de descente est allumé à plusieurs reprises. Puis le moteur de remontée est mis à feu pour simuler une procédure d'urgence. Tous les tests se déroulent de manière satisfaisante[56].
Apollo 9
 L'équipage d'Apollo 9 teste le fonctionnement du LEM en orbite au-dessus de la terre
L'équipage d'Apollo 9 teste le fonctionnement du LEM en orbite au-dessus de la terreLe 3 mars 1969 la mission Apollo 9 décolle pour un test complet du module lunaire avec son équipage. Après avoir été mis en orbite terrestre, les astronautes vont répéter toutes les manœuvres qui devront être réalisées durant la mission lunaire. L'accostage du LEM par le module de commande puis l'extraction de son carénage sont exécutés pour la première fois. Deux des astronautes se glissent alors dans le tunnel reliant le module de commande au LEM et mettent en marche les sous-systèmes du LEM avant d'allumer le moteur de descente sans toutefois se détacher du Module de Commande.
Le lendemain l'équipage du LEM se sépare du CSM, déploie le train d'atterrissage et met à feu le moteur de descente en testant plusieurs niveaux de poussée. Puis après avoir largué l'étage de descente, il simule la remontée depuis le sol lunaire et la manœuvre de rendez-vous : il entame la poursuite du vaisseau Apollo, dont il s'était écarté de près de 200 km, en utilisant le moteur de remontée. Le test, qui comportait un certain risque si les moteurs du module lunaire s'étaient avérés défaillants (Le LEM n'aurait pas résisté à une rentrée dans l'atmosphère terrestre), est un succès complet[57].
À partir de ce vol, les modules lunaires recevront un nom de baptême (pour Apollo 9, ce sera « Spider ») qui permettra de distinguer, au cours des échanges radio avec le support au sol, l'équipage du LEM de celui du Module de Commande et de Service.
Apollo 10
La mission Apollo 10 s'envole le 26 mai 1969. Ce vol aurait pu être l'occasion du premier atterrissage sur la Lune mais les responsables de la NASA préfèrent effectuer un dernier test pour vérifier le fonctionnement du système de navigation et du radar d'altitude autour de la Lune. Le déroulement de la mission va être une répétition presque complète d'un vol lunaire. La descente vers la Lune n'est interrompue qu'à 14,4 km du sol. Après un bref emballement du moteur de descente dû à une erreur de manipulation, « Snoopy »(le LEM) effectue une manœuvre de rendez-vous parfaite avec « Charlie Brown » (le module de commande)[58].
Les missions lunaires : Apollo 11 à 17 (1969-1972)
Six exemplaires de LEM vont se poser sur la Lune entre 1969 et 1973, permettant, ainsi à 12 hommes de fouler le sol lunaire. Apollo 13 est le seul échec mais les astronautes purent revenir sains et saufs sur Terre grâce au LEM. Seuls des incidents mineurs émaillèrent les 6 missions qui parvinrent à se poser sur la Lune.
Apollo 11 : l'épreuve du feu
Article détaillé : Apollo 11. Buzz Aldrin descend l'échelle du module lunaire (Apollo 11) après avoir refermé en partie l'écoutille.
Buzz Aldrin descend l'échelle du module lunaire (Apollo 11) après avoir refermé en partie l'écoutille.Le module lunaire de la mission Apollo 11 est le premier à se poser sur la Lune. Le 20 juillet 1969 Edwin Aldrin et Neil Armstrong (pilote) entament la descente vers le sol lunaire. Durant la phase d'approche finale la sérénité de l'équipage est ébranlée par des alarmes répétées de l'ordinateur qui, saturé, ne peut plus exécuter toutes les tâches qui lui ont été assignées. Or, ce système joue un rôle essentiel pour déterminer la trajectoire qui permettra de se poser avec les faibles marges de carburant disponibles. Accaparé par ces alarmes, qui pourraient signifier la fin prématurée de la mission, le pilote effectue un repérage visuel du terrain trop tardif. Lorsqu'il s'aperçoit que la trajectoire mène le LEM droit sur une zone encombrée de rochers il est déjà trop bas pour la corriger. Il reprend manuellement les commandes (le LEM était jusqu'alors en autopilotage) et survole à la manière d'un hélicoptère la zone dangereuse en entamant dangereusement les dernières réserves de carburant. Lorsqu'il pose le module lunaire il ne reste plus que 50 secondes de propergols dans les réservoirs et 20 secondes avant la décision d'abandon de mission[59].
L'enquête révélera que la surcharge de l'ordinateur était due à l'envoi de demandes de traitement par le radar de rendez-vous à fréquence très rapprochée. Il y avait en fait 2 erreurs : d'une part la procédure indiquait à tort de laisser le radar de rendez-vous allumé et d'autre part il y avait un défaut de conception dans l'interface entre l'ordinateur et le radar de rendez-vous. Les simulations réalisées n'avaient pas permis de détecter l'anomalie, car l'ordinateur de rendez-vous n'était pas branché pour les atterrissages. Le problème sera corrigé pour les missions suivantes. Par ailleurs, des mesures seront prises (modification des programmes de calcul de trajectoire et accroissement des corrections de trajectoire intermédiaires) pour que les pilotes disposent de plus de marge en carburant[60]. Le reste de la mission se déroulera sans incident majeur.
Apollo 13 : le LEM radeau de sauvetage
Article détaillé : Apollo 13.Quantité Description Montant 400 001 Mille Remorquage : 4$ le premier mille, 1$ par mille ensuite.
Tarif Appel d'urgence, Service express400 004 $ 1 Recharge de batterie avec les câbles du client + $.05 pour recharge in situ 4,05 $ 25 Oxygène à 20$/kg 500 $ Couchage pour 2, sans télévision, avec air conditionné et vue (contrat NAS-9-1100)[N 24] Prépayé 4 Couchage supplémentaire à 8$ la nuit, chambre à libérer avant le vendredi 17/4/1970, service non garanti au-delà de cette date 32 $ La facture humoristique envoyée au constructeur du module de commande défaillant Alors que le LEM et le CMS de la mission Apollo 13 sont en route pour la Lune, une pile à combustible explose à la suite d'un court-circuit et ravage le module de service : les réserves en oxygène du CMS tombent à zéro et les deux tiers de ses ressources électriques disparaissent. La mission doit être interrompue mais le moteur de propulsion principal n'est plus jugé assez sûr, du fait de sa proximité avec le foyer de l'explosion, pour permettre son utilisation et réaliser un demi-tour. Le LEM va jouer un rôle crucial, qui n'avait pas été prévu par ses concepteurs, dans le sauvetage de l'équipage de la mission Apollo 13. L'équipage se réfugie dans le module lunaire qui est alors activé. Le contrôle au sol décide de laisser le vaisseau faire le tour de la Lune et revenir vers la Terre. Les consommables (oxygène, électricité) stockés dans les deux vaisseaux ne sont toutefois pas suffisants pour faire face aux besoins des trois astronautes jusqu'à leur arrivée. Le moteur de descente du LEM est utilisé à plusieurs reprises pour optimiser la trajectoire. Plusieurs bricolages sont improvisés pour disposer de suffisamment d'électricité et éliminer le CO2 permettent à l'équipage d'arriver sain et sauf.
Un employé de Grumman enverra une facture humoristique pour ce remorquage non prévu à la société North American constructeur du Module de Commande et de Service sinistré[61].
Apollo 14 : un abandon non désiré
Peu avant que le Lem aborde sa descente vers le sol lunaire, le contrôle à Houston se rend compte en examinant les données périodiquement transmises par télémétrie que l'interrupteur qui permet de déclencher l'abandon de l'atterrissage en cas de problème grave est positionné sur ON. Dès que la descente aura été amorcée, l'ordinateur interprétera l'information comme une demande d'abandon et larguera l'étage de descente interrompant la mission. Le problème vient d'un faux contact mais le circuit concerné ne peut pas être réparé. Il ne reste que 2 heures pour trouver une solution : les développeurs sur Terre finissent par trouver une méthode pour tromper l'ordinateur et font rentrer une longue liste de commandes par les astronautes. La manipulation a une contrepartie : si la mission doit être effectivement interrompue, les automatismes ne pourront plus jouer et les astronautes devront détailler chaque étape en saisissant les instructions. Heureusement, après une ultime frayeur (refus temporaire du radar d'atterrissage de fonctionner) l'atterrissage se déroula parfaitement[62].
 Buzz Aldrin (Apollo 11) tournant le dos au pupitre du pilote
Buzz Aldrin (Apollo 11) tournant le dos au pupitre du piloteApollo 15 : la version lourde des missions J
Article détaillé : Apollo 15.À compter d'Apollo 15, les modules lunaires séjournent plus longtemps sur la Lune et sont donc plus lourds. La tuyère du moteur de descente est rallongée d'une trentaine de centimètres et est du coup susceptible de toucher le sol lunaire : pour éviter qu'une surpression se forme à l'atterrissage dans la cloche de la tuyère et ne renverse le Module Lunaire, la consigne avait été donnée d'arrêter le moteur-fusée dès le premier contact des sondes prolongeant vers le bas le train d'atterrissage soit à environ 1,3 mètres du sol[N 25]. Cette consigne existait déjà, mais le pilote James B. Irwin l'appliqua pour la première fois avec la plus grande rigueur. Il fit l'atterrissage le plus dur de tous les modules lunaires. Le LEM qui avait, au moment de l'arrêt du moteur, une vitesse verticale résiduelle de 0,5 km/h arriva sur le sol lunaire à près de 7 km/h (les autres LEM se posèrent avec une vitesse verticale de 2 à 3 km/h). Par manque de chance, le module lunaire atterrit à cheval sur le relief d'un petit cratère que le pilote n'avait pas pu apercevoir, à cause du nuage de poussière soulevé par le moteur, et les jambes du train d'atterrissage ne se posèrent pas en même temps accroissant le choc (le LEM accusera une inclinaison de 11° une fois posé)[63].
Conclusion (après 1973)
Année Montant % coût du
programme Apollomillions $ courant (millions $ 2008) 1963 123 865 20 % 1964 135 937 6 % 1965 242 1 655 9 % 1966 311 2 061 10 % 1967 473 3 048 16 % 1968 400 2 474 16 % 1969 326 1 914 16 % 1970 241 1 338 16 % Total 2 251 14 290 13% Le coût du Lem en valeur courante et actualisée
(test, système de guidage/navigation non compris)En septembre 1970 le programme Apollo subit des coupes budgétaires drastiques traduisant les nouvelles priorités du gouvernement Nixon : Apollo 11 a réussi à capter le prestige dont bénéficait jusqu'à présent le programme spatial russe et la guerre du Vietnam draine désormais les ressources budgétaires des États-Unis. La NASA est obligée d'annuler les 2 dernières missions Apollo planifiées. Le dernier module lunaire atterrit le 11 décembre 1972 sur la Lune dans le cadre de la mission Apollo 17 qui comprenait pour la première fois un scientifique : le géologue Harrison Schmitt[64]. Les trois LEM en cours de construction dans les locaux de la société Grumman restèrent inachevés.
Le coût final du module lunaire Apollo dépassera toutes les prévisions et se monte fin 1970, lorsque le projet est achevé, à 2,2 milliards de dollars de l'époque (14,3 milliards de dollars 2008) soit 13 % du coût total du projet Apollo[65]. À titre de comparaison cette somme est à peu près l'équivalent de 3 années du budget de l'Agence spatiale européenne 2006. Ce chiffre ne comprend pas le développement du système de guidage et de navigation partagé avec le module de commande (3,8 milliards de dollars 2008), les coûts d'intégration et de test qui représentent sans doute le même montant, etc.
Les développements abandonnés
Plusieurs variantes du LEM prévues pour une phase ultérieure de l'exploration lunaire ne verront pas le jour :
- Le LEM « cargo » est un module lunaire non habité utilisé pour transporter environ 5 tonnes de matériel sur la Lune. Le fret remplace l'étage de remontée tandis que l'étage de descente est équipé de moteurs de contrôle d'attitude ainsi que d'un ordinateur de navigation et de guidage[66].
- Le LEM « taxi » est un LEM disposant de consommables permettant des séjours de 14 jours sur la Lune pour un équipage de 3 astronautes. Il peut être envoyé sur la Lune peu après qu'un LEM « abri » y a été lancé[67].
- Le LEM « abri » utilisé de manière combinée avec le LEM « taxi » a son étage de remontée remplacé par des consommables et du matériel scientifique. Il atterrit sur la Lune en pilotage automatique[68].
- Le LEM « Lab » est constitué de l'étage de remontée du LEM dont on a remplacé le moteur et les réservoirs par environ 10 tonnes de matériel scientifiques pour des observations et des expériences en orbite terrestre[69]. Le LEM « Lab » devint progressivement l'ATM (Apollo Telescope Mount), une structure non pressurisée porteuse d'un télescope pour l'observation du soleil. Prévu initialement pour être mis en orbite seul, il est finalement développé comme un module annexe de la station Skylab[70].
La descendance du LEM : le vaisseau Altair
Article détaillé : Altair (véhicule spatial). Vue d'artiste d'un des designs du module lunaire Altair.
Vue d'artiste d'un des designs du module lunaire Altair.En janvier 2004, le président des États-Unis, George W. Bush, lance le programme Constellation dont l'objectif est de ramener des hommes sur la Lune vers 2020. Le projet prévoit la construction d'un module lunaire baptisé Altair lointain descendant du LEM. Altair reprend de nombreuses caractéristiques de son prédécesseur : c'est un vaisseau conçu uniquement pour descendre sur la Lune, y séjourner et remonter en orbite. L'équipage revient ensuite à Terre à bord d'un vaisseau resté en orbite lunaire : l'Orion. Il est composé d'un étage de descente (qui reste sur le sol lunaire) et d'un étage de remontée qui se pose verticalement sur un train d'atterrissage analogue à celui du LEM. Il comporte deux ouvertures dont une utilisée pour accéder au sol lunaire. Mais certains aspects du programme Constellation sont très différents du programme Apollo : Altair est envoyé dans l'espace par une fusée dédiée et est assemblé avec l'Orion en orbite terrestre. Trois fois plus lourd que le LEM, il est propulsé par des moteurs cryogéniques (descendants de ceux utilisés par la fusée Saturn). Il doit embarquer l'ensemble de l'équipage de la mission (quatre astronautes). La cabine pressurisée comprend un sas et un coin toilette.
Les modules lunaires dans les musées
Article détaillé : Liste des modules lunaires Apollo.Aujourd'hui plusieurs exemplaires du module lunaire sont conservés dans différents musées : ce sont des exemplaires n'ayant jamais volé, des modèles utilisés pour les tests de résistance ou des modèles utilisés pour les entrainements.
Vidéos
Alunissage du LEM d'Apollo 15 : le copilote annonce la hauteur en pieds et de temps en temps le pourcentage de fuel restant. La poussière soulevée à compter de 20 mètres ne permet pas au pilote de voir qu'il se pose sur le bord d'un petit cratère ; il en résultera une gite de près de 10°.
Le décollage depuis la Lune de l'étage de remontée du LEM de Apollo 17 filmé par la caméra du rover lunaire : la trajectoire est verticale sur une centaine de mètres pour se dégager du relief puis prend sa trajectoire définitive beaucoup plus inclinée.
Voir aussi
Articles connexes
Liens externes
- (en) Schémas des composants du module lunaire (NASA) [pdf]
- (en) La version cargo du module lunaire (jamais développée)
- (en) Le module lunaire par un ancien employé de Grumman
- (fr) De la Terre à la Lune, site de référence francophone : présentation du LEM
Annexes
Sources
Principales sources utilisées pour la rédaction de l'article :
- (en) G Brooks, James M. Grimwood, Loyd S. Swenson, Chariots for Apollo: A History of Manned Lunar Spacecraft, 1979.
Le programme Apollo : le développement des différents modules Apollo (document NASA n° SP 4205)
- (en) W. David Compton, Where No Man Has Gone Before: A History of Apollo Lunar Exploration Missions, 1989.
Histoire du programme Apollo (document NASA n° SP 4214
- (en) Société Grumman, Apollo Operations Handbook, Lunar Module, LM 10 and Subsequent, Volume I, Subsystems Data, 1970.
Description des sous-systèmes du module lunaire
- (en) Société Grumman, Apollo Operations Handbook, Lunar Module, LM 11 and Subsequent, Volume II, Operational Procedures, 1971.
Procédures du module lunaire
- (en) Hansen, James R, Enchanted Rendezvous : John C. Houbolt and the Genesis of the Lunar-Orbit Rendezvous Concept, 1995.
Génèse du rendez-vous en orbite lunaire (LOR)
- (en) F. V. Bennett, Apollo lunar descent and ascent trajectories, 1970.
Définition des trajectoires de descente et de remontée du module lunaire Apollo (document NASA n° TM X-58040)
- (en) Société Grumman, NASA Apollo Lunar Module News Reference, 1968.
Présentation à usage public des caractéristiques techniques détaillées du LEM par son constructeur
- (en) I. D. Ertel, M.L.Morse, J.K.Bays, C.G. Brooks, The Apollo Spacecraft: A Chronology, 1969-1978.
Chronologie du projet Apollo (document NASA n° SP-4009)
- (en) Chronologie du programme de développemnt du module lunaire sur le site Astronautix
- (en) W.David Woods, How Apollo flew to the moon, Springer, 2008 (ISBN 978-0-387-71675-6).
Histoire du programme Apollo
- (en) David A. Mindell, Digital Apollo Human and Machine in Spaceflight, The MIT Press, 2008 (ISBN 978-0-262-13497-2).
Histoire de la conception des systèmes informatiques embarqués du programme Apollo
Sources utilisées ponctuellement :
- (en) NASA, Apollo11 mission report (preparation), 1979.
Planification de la mission Apollo 11 ;ref NASA : M-932-69-11
- (en) NASA, Apollo11 mission report, 1979.
Rapport de mission Apollo 11 ;ref NASA : MSC-000171
- (en) NASA, Apollo15 mission report, 1971.
Rapport de mission Apollo 15 ;ref NASA : MSC-005161
- (en) NASA, Apollo9 mission report, 1979.
Rapport de mission Apollo 9 ;ref NASA : MSC-PA-R-69-2
- (en) NASA, Apollo10 mission report, 1979.
Rapport de mission Apollo 10 ;ref NASA : MSC-00126
- (en) NASA, Guidance, Navigation and Control subsystem Study guide for training, 1976.
Panneaux de contrôle du LEM (manuel d'entrainement)
- (en) NASA, Apollo Experience Report : Lunar module display and Control Subsystem, 1972.
Retour d'expérience sur la conception des interrupteurs, instruments d'affichages référence NASA TN-D 6725
- (en) Allan R Klumpp, Apollo Lunar Descent Guidance, 1971.
Specifications des programmes gérant l'atterrissage (P63, P64, P66) MIT R 695
- (en) James E. Tomayko, Computers in Spaceflight The NASA Experience, 1988.
Synthèse historique de l'utilisation des ordinateurs embarqués à la NASA
- (en) Richard W Orloff, Apollo by the Numbers: A Statistical Reference, 2000.
Apollo en chiffres (ref NASA SP-2049)
- (en) NASA, Apollo 15 flight journal - Landing at Hadley, 1996.
Journal de vol d'Apollo 15 annoté : l'atterrissage
- (en) NASA, Apollo 11 flight journal - The First Lunar Landing, 1995.
Journal de vol d'Apollo 11 annoté : l'atterrissage
- (en) Patrick Rozas and Allen R. Cunningham, Lunar Module Landing Radar and Rendezvous Radar, 1972.
Fonctionnement des radars de rendez-vous et d'atterrissage (ref NASA TND-6849)
- (en) NASA, Lunar Module/Abort Guidance System /LM/AGS/ design survey, 1968.
Caractéristiques et historique de la réalisation de l'AGS système de navigation de secours (ref NASA CR-86189)
Notes
- ↑ L'acronyme LM a remplacé en 1968 LEM parce que les dirigeants de la NASA considéraient que le terme Excursion traduisait mal la portée du projet lunaire
- ↑ Les vols précédents étaient des vols balistiques c'est-à-dire que la capsule Mercury ne se mettait pas en orbite
- ↑ Un cas d'école de dysfonctionnement de l'organisation d'une entreprise. Son courrier commençait ainsi « Somewhat as a voice in the wilderness, I would like to pass on a few thoughts that have been of deep concern to me over recent months ... Do we want to go to the moon or not?, and, if so, why do we have to restrict our thinking to a certain narrow channel?...»
- ↑ . Cette société fait partie depuis 1994 du groupe Northrop Grumman
- ↑ La première sonde Surveyor se pose en douceur sur le sol lunaire le 2 juin 1966 : les capteurs dont elle dispose indiquent que le sol lunaire est plutôt plus ferme que ce qui était prévu
- ↑ Une plage de poussée comprise entre 65 et 92,5 % est exclue, car elle provoque une [[ablation (astronautique)|]] trop rapide du revêtement de la tuyère.
- ↑ Le responsable du projet chez Grumman reprochera à la NASA d'avoir refusé par ailleurs l'emploi des circuits intégrés dans le reste de l'électronique du LEM
- ↑ les plus importantes sont détaillées dans les rapports rédigés après les missions disponibles ici [1])
- ↑ Le choix de batteries à la place de piles à combustible est une des dernières options structurantes à être figée (avril 1965). Les solutions concurrentes du radar de rendez-vous et du guidage optique seront développées en parallèle jusqu'à la sélection du radar au printemps 1966
- ↑ La fabrication du train d'atterrissage est réalisée par Héroux-Devtek Inc. dans son usine de Longueuil au Québec
- ↑ Chaque hublot est constitué de deux lames de verre séparées par une lame d'air qui ont subi des traitements pour filtrer les rayonnements ultraviolets et infrarouges, empêcher l'éblouissement et résister aux micrométéorites
- ↑ C'est le constructeur automobile Chrysler qui la met en œuvre pour la première fois de manière industrielle dans les tableaux de bord de certains de ses modèles automobiles en 1960
- ↑ Six positions sont possibles, permettant de couvrir toute l'hémisphère céleste en prenant comme plan de référence le plancher de la cabine
- ↑ La société TRW a été démembrée à la suite de son rachat par Northrop Grumman. La branche aéronautique de TRW fait maintenant partie de Goodrich Corporation.
- ↑ En l'absence d'atmosphère, la chaleur ne se diffuse que par conductivité. En écartant la couverture thermique de la coque du LEM on empêche toute transmission de chaleur
- ↑ La température au sol passe progressivement de 0 à 130°C entre le lever du Soleil et le moment où le Soleil culmine (au bout de 177 heures terrestres)
- ↑ L'étage de la fusée reçoit une poussée supplémentaire grâce à l'éjection des propergols non brûlés.
- ↑ . Le carburant prévu permettait une variation de vitesse de 152 mètres/seconde
- ↑ La décélération est de 891 m/s soit 3 200 km/h
- ↑ Les corrections de l'orientation sont réalisées par les moteurs d'attitude. Le moteur de descente peut être également utilisé grâce au montage sur cardan (jusqu'à 6° d'inclinaison par rapport à la verticale) à condition que les corrections ne nécessitent pas une trop grande rapidité d'exécution
- ↑ L'échelle est gravée à la fois sur les hublots intérieur et extérieur et l'astronaute doit aligner les 2 échelles.
- ↑ Il s'agit du programme P65 qui ne sera jamais utilisé au cours des missions Apollo
- ↑ Une dizaine d’appareils photos Hasselblad en bon état (à l’époque) jonchent le sol lunaire
- ↑ Cette référénce correspond au contrat NASA/Grumman pour la fabrication du LEM
- ↑ Lorsque les tigelles longues de 1,3 mètres qui prolongent vers le bas les semelles du train d'atterrissage signalent touchent le sol lunaire
Références
Toutes les références correspondent à des textes en anglais sauf mention contraire
- ↑ (en) Project Apollo: A Retrospective Analysis
- ↑ Enchanted Rendezvous : John C. Houbolt and the Genesis of the Lunar-Orbit p.28 et 34
- ↑ a et b Chariots for Apollo Analysis of LOR
- ↑ a et b Chariots for Apollo NASA-Grumman Negotiations
- ↑ The Apollo Spacecraft A Chronology Part 3D : 25 July 1962
- ↑ a et b Grumman : Lunar Module News Reference p.212
- ↑ a , b et c Chariots for Apollo Hatches and Landing Gear
- ↑ a et b Chariots for Apollo External Design
- ↑ a et b Chariots for Apollo Tailoring the Cockpit
- ↑ a et b Manuel Sous-systèmes du Module Lunaire - Grummman parag. 2.3.2
- ↑ Chariots for Apollo Engines, Large and Small
- ↑ a , b et c Computers in Spaceflight The NASA Experience Chap. 2 Computers On Board The Apollo Spacecraft - The need for an on-board computer
- ↑ Phil Parker Apollo and the integrated circuit
- ↑ Chariots for Apollo Guidance and Navigation
- ↑ Digital Apollo Human and Machine in Spaceflight p.249
- ↑ a et b Chariots for Apollo The "Sub-Prime" and the Radar Problem
- ↑ Interview Armstrong 2001 page 79 [pdf]
- ↑ Chariots for Apollo Mockup Reviews
- ↑ a et b Chariots for Apollo The LEM Test Program: A Pacing Item
- ↑ Chariots for Apollo Lunar Module Refinement
- ↑ Chariots for Apollo Lunar Module
- ↑ a , b et c Chariots for Apollo The LM: Some Questions, Some Answers
- ↑ Chariots for Apollo Worries and Watchdogs
- ↑ How Apollo flew to the moon p. 220
- ↑ Apollo by the Numbers: A Statistical Reference, LM Descent Stage Propellant Status
- ↑ Chariots for Apollo Selecting and Training Crews
- ↑ Grumman : Lunar Module News Reference p.28-31
- ↑ Clavius - Space vehicules : lunar module stability
- ↑ a et b Grumman : Lunar Module News Reference p.21-24
- ↑ display and Control Subsystem page 3
- ↑ Computers in Spaceflight The NASA Experience Chap. 2 Computers On Board The Apollo Spacecraft - The Apollo guidance computer: Hardware
- ↑ Operations Handbook LM Subsystems Data page 2.1.62-65
- ↑ Apollo Surface Journal (NASA) : Notice sur l'AOT
- ↑ Operations Handbook LM Subsystems Data page 2.2.1-6
- ↑ Operations Handbook LM Subsystems Data page 2.2.1-25
- ↑ Description du COAS
- ↑ display and Control Subsystem page 27-28
- ↑ display and Control Subsystem page 28
- ↑ Lunar Module/Abort Guidance System /LM/AGS/ design survey page 2-8
- ↑ Operations Handbook LM Subsystems Data page 2.6.1
- ↑ Operations Handbook LM Subsystems Data page 2.6.16-22
- ↑ (en) Apollo Experience report - Battery subsystem - J. Barry Trout (NASA), 1972, référence NASA TN D-6976, 10 p. [pdf]
- ↑ Grumman : Lunar Module News Reference p.163-167
- ↑ Operations Handbook LM Subsystems Data page 2.7.1-44
- ↑ W. David Compton (1989), First phase of exploration completed :Changes for Extended Lunar Missions
- ↑ (en) Appolo 15 kit press page 143 [pdf]
- ↑ Apollo 11 press kit p.26-33
- ↑ Digital Apollo Human and Machine in Spaceflight p. 189
- ↑ Apollo lunar descent and ascent trajectories p. 3-4
- ↑ Apollo lunar descent and ascent trajectories p.2
- ↑ Apollo lunar descent and ascent trajectories p.7-9
- ↑ Digital Apollo Human and Machine in Spaceflight p. 201
- ↑ Apollo lunar descent and ascent trajectories p.5
- ↑ Apollo lunar descent and ascent trajectories p. 10-12
- ↑ Chariots for Apollo Apollo 4 and Saturn
- ↑ Chariots for Apollo Apollo 5: The Lunar Module's Debut
- ↑ Chariots for Apollo Apollo 9: Earth Orbital trials
- ↑ Chariots for Apollo Apollo 10: The Dress Rehearsal
- ↑ Apollo 11 flight journal - The First Lunar Landing de 102:38:26 à 102:45
- ↑ Apollo lunar descent and ascent trajectories p. 16-25
- ↑ Facture envoyé par Grumman à North American
- ↑ Digital Apollo Human and Machine in Spaceflight p.243-248
- ↑ Apollo 15 flight journal - Landing at Hadley
- ↑ W. David Compton (1989), First phase of lunar exploration completed : Cutbacks and Program Changes
- ↑ Apollo by the Numbers: A Statistical Reference, Apollo Program Budget Appropriations
- ↑ Astronautix : article Apollo LM Truck
- ↑ Astronautix : article Apollo LM Taxi
- ↑ Astronautix : article Apollo LM Shelter
- ↑ Astronautix : article Apollo LM Lab
- ↑ Astronautix : article Apollo LTM
 Portail de l’astronautique
Portail de l’astronautique Portail de l’exploration
Portail de l’exploration

La version du 19 mars 2009 de cet article a été reconnue comme « article de qualité », c'est-à-dire qu'elle répond à des critères de qualité concernant le style, la clarté, la pertinence, la citation des sources et l'illustration. Catégories : Article de qualité | Programme Apollo



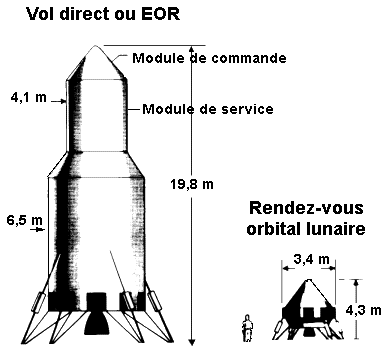




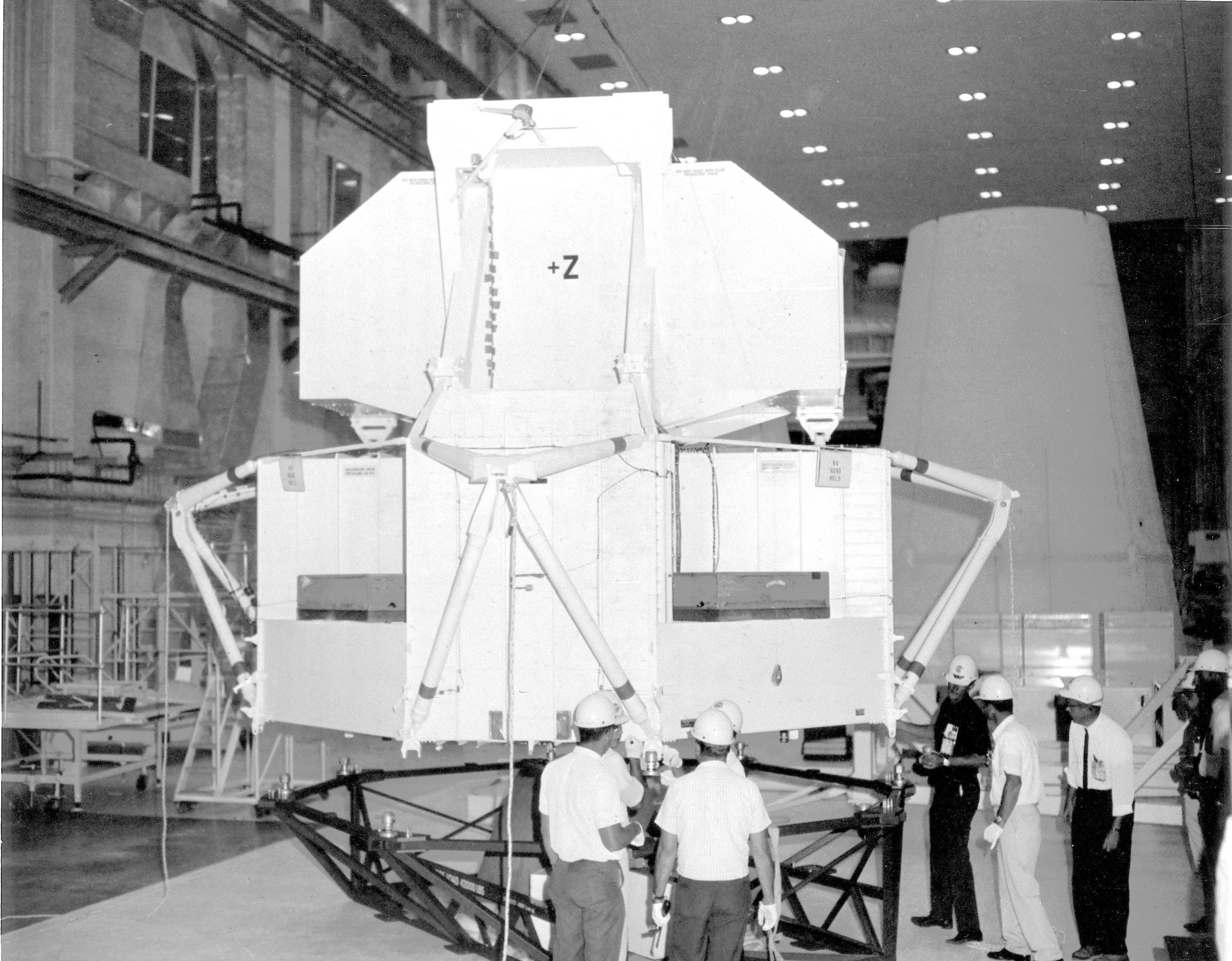


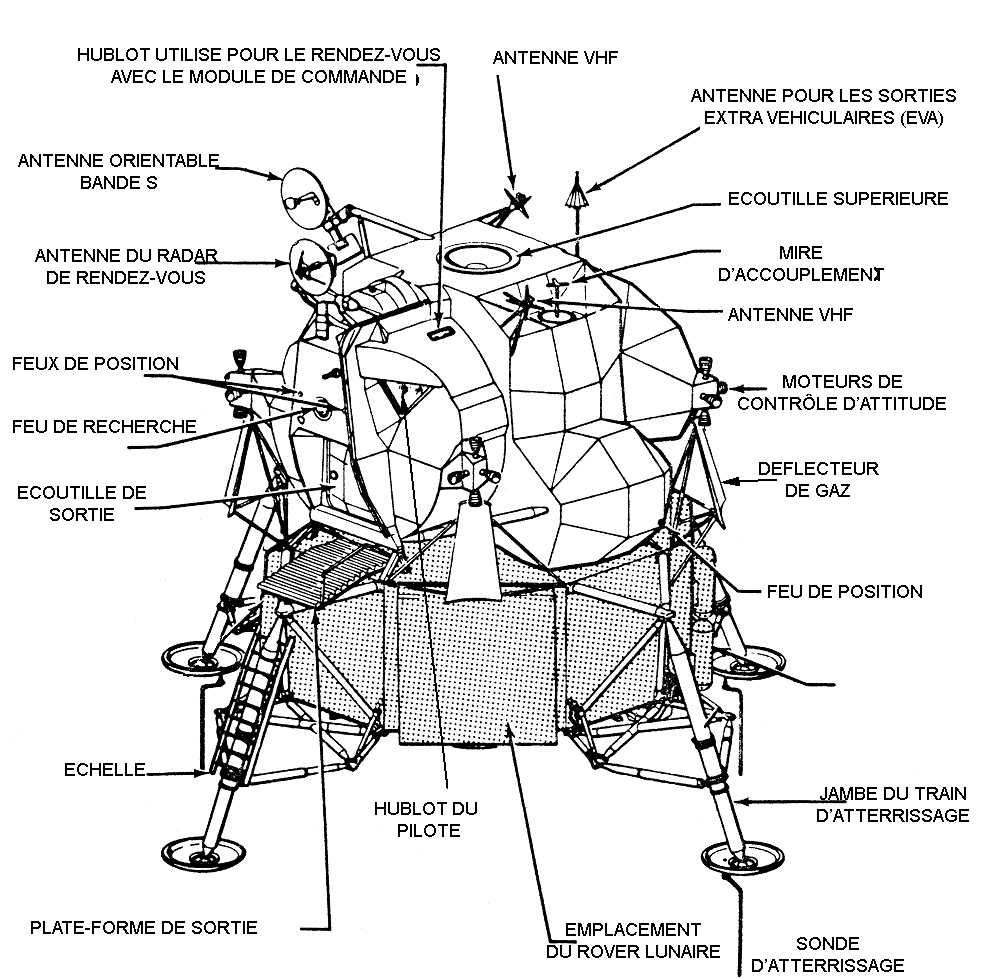

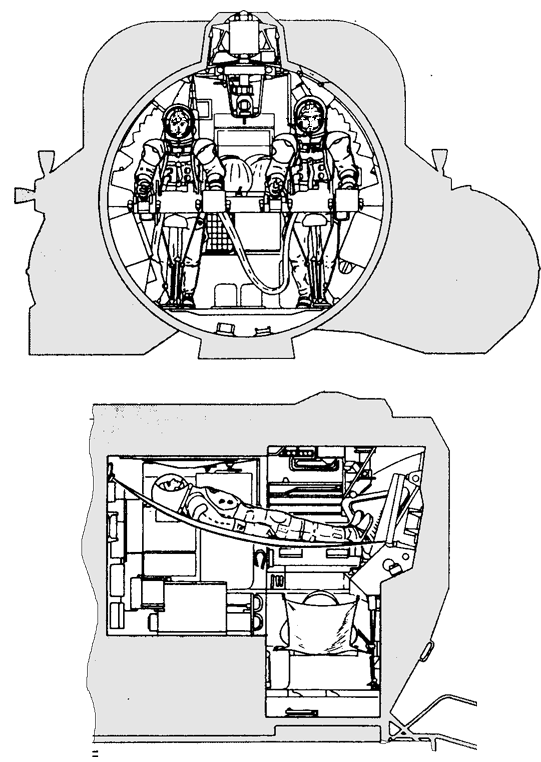
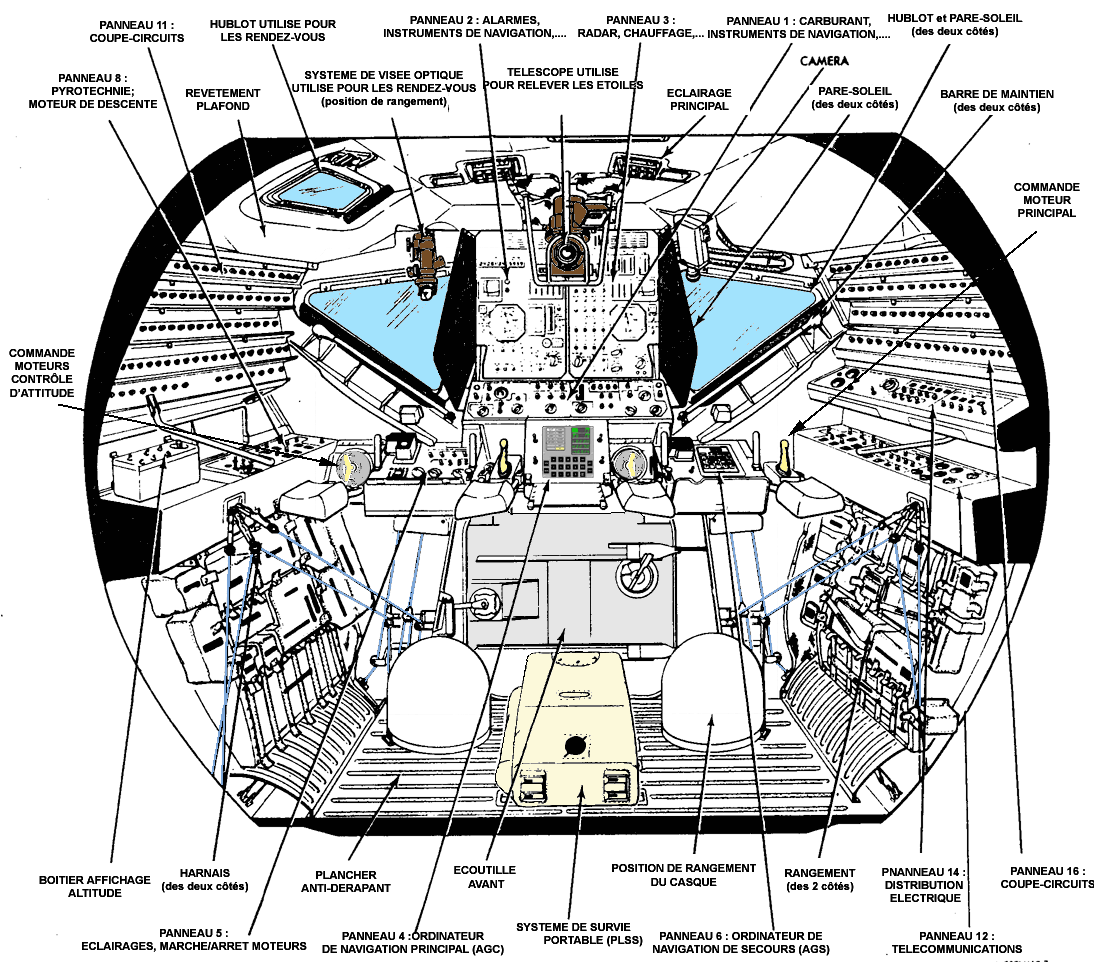
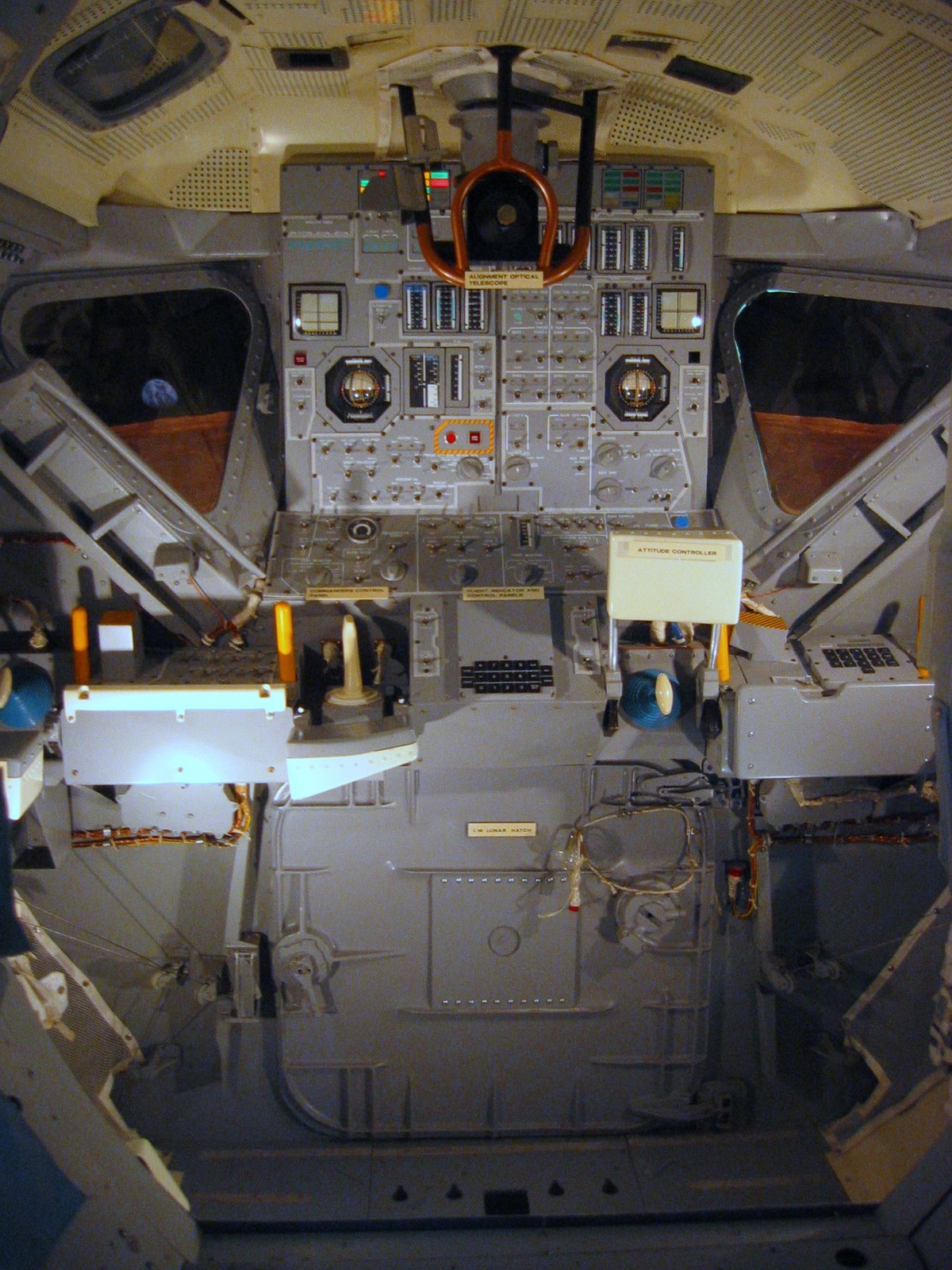

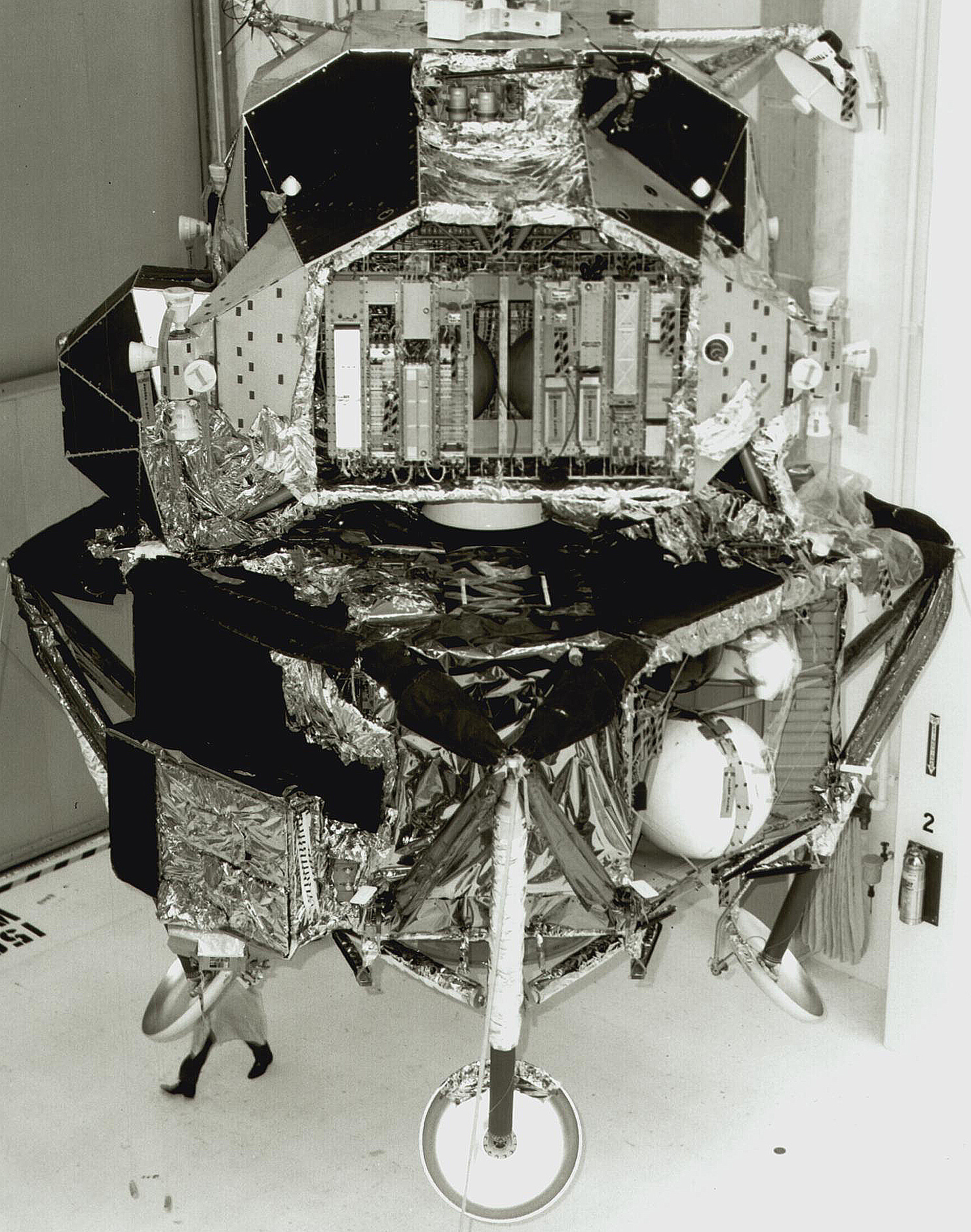


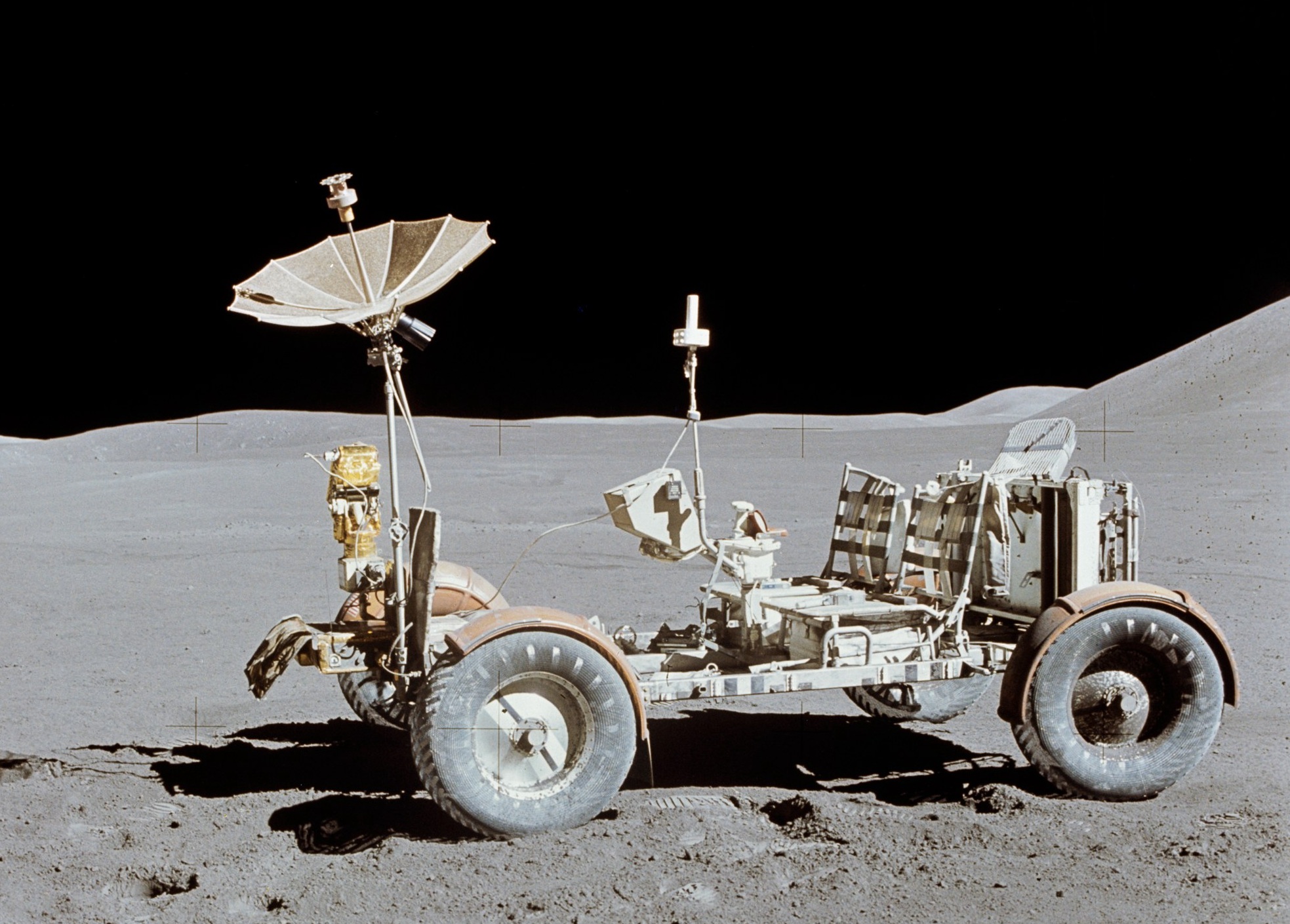


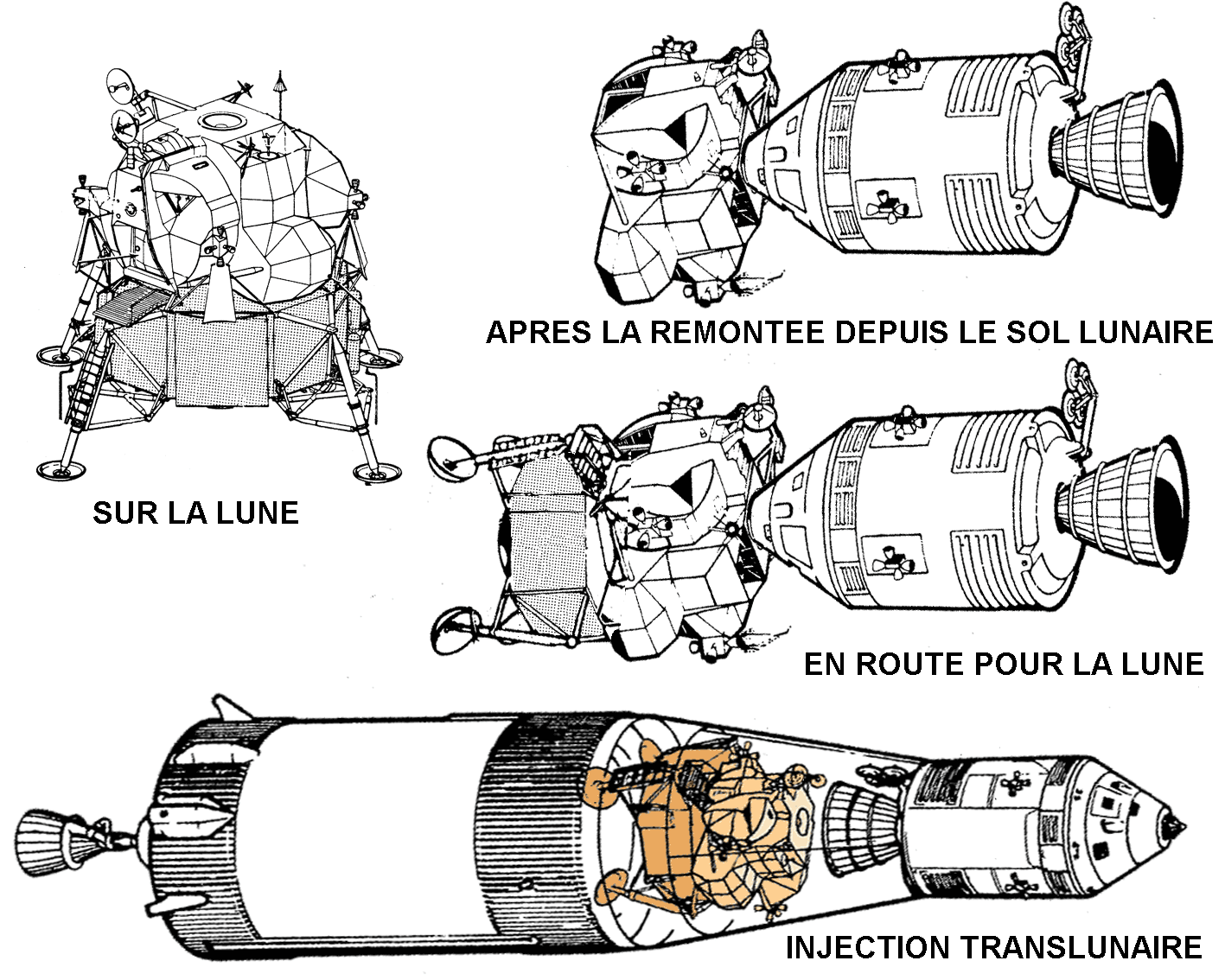



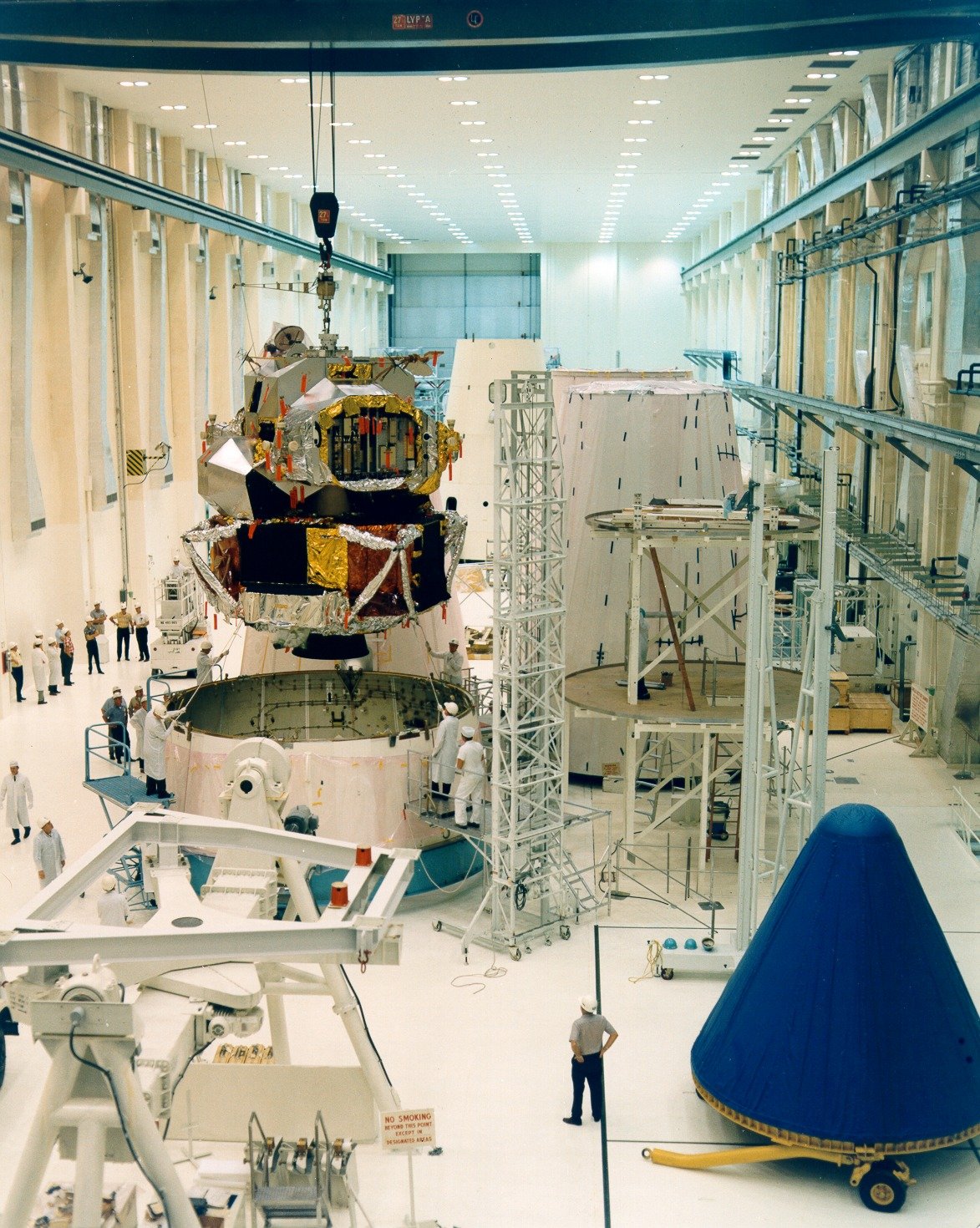

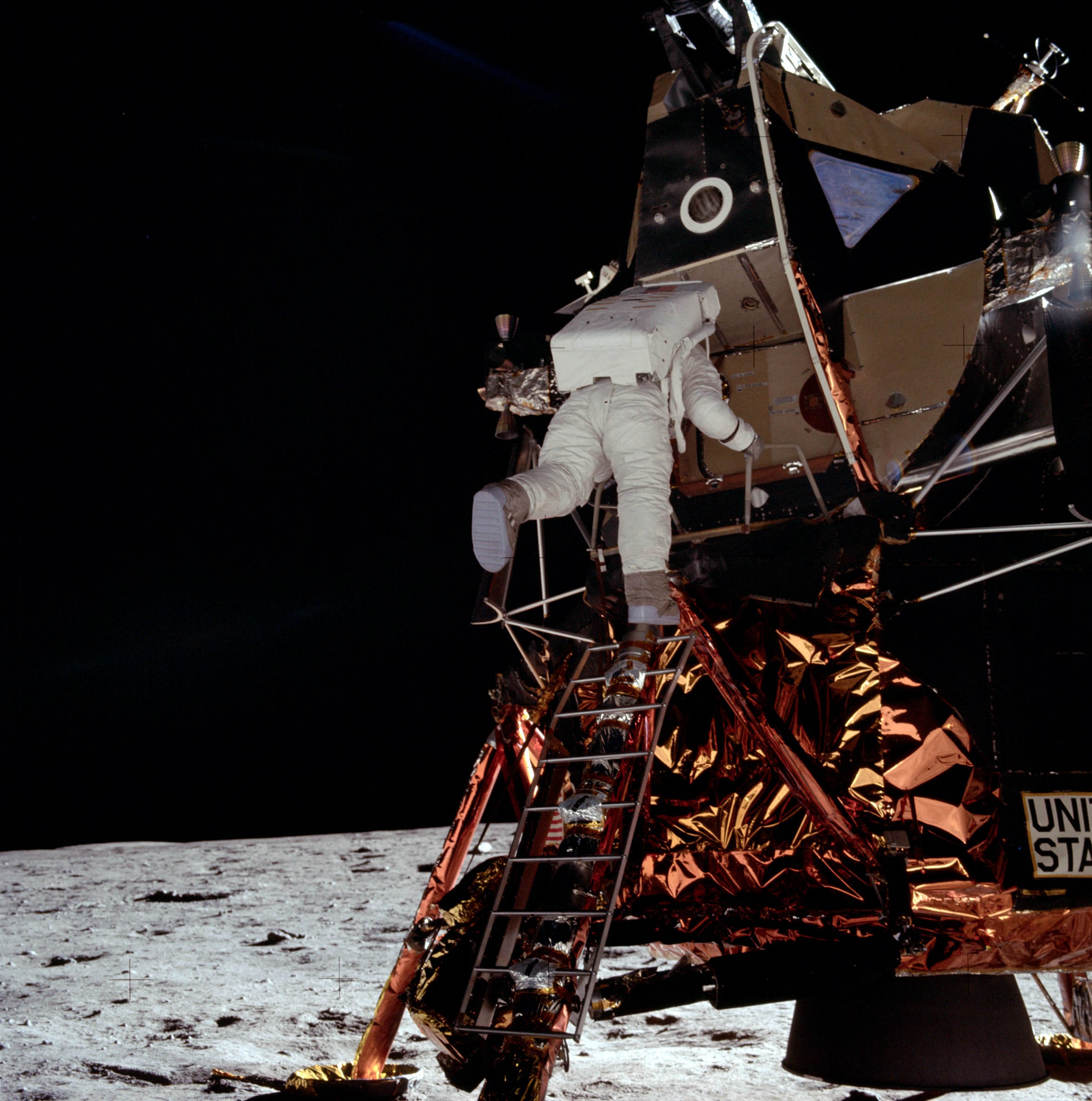



Wikimedia Foundation. 2010.